基于脉宽调制功率放大器的伺服驱动设计
2020-06-29靳磊杨国文赵冲李乐刘涛
靳磊 杨国文 赵冲 李乐 刘涛

摘 要:针对目前伺服控制器中驱动功能简单、保护措施少、效率低等问题,采用了新型脉宽调制功率放大器和相关逻辑电路相结合的设计方法,设计了一种具有电流闭环和速度闭环功能的直流电机驱动器。设计的伺服驱动器输出电流范围广、模块化程度高,适用于多种伺服电机。文章给出了工程应用中各器件的参数计算方法以及电流环和速度环参数整定调试步骤。通过在实际应用测试表明文章设计的伺服驱动器速度精度高、使用可靠,具有较高的工程实用性。
关键词:伺服;脉宽调制;功率放大器;直流电机
中图分类号:TM33 文献标志码:A 文章编号:2095-2945(2020)20-0078-03
Abstract: For the problems of simple driving function, less protection measures and low efficiency in the current servo controller,a new PWM power amplifier andrelated logic circuits are used to design a DC motor driver with the function of current closed-loop and speed closed-loop. The designed servo driver has a wide range of output current and a high degree of modularity, which is suitable for a variety of servo motors. In this paper, the parameter calculation method of each device in engineering application and the adjustment and debugging steps of current loop and speed loop parameters are given. The practical application test shows that the servo driver designed in this paper has high speed accuracy, reliable use and high engineering practicability.
Keywords: servo; PWM; power amplifier; DC motor
引言
传统的电机驱动大多采用线性功率放大器,由于器件本身不能承受过大的电流,因此线性功率放大器具有低电压、输出功率小、效率低等特点,不太适合当前直流电机驱动设计效率高、功率大等应用需求。脉宽调制功率放大器是按照固定频率接通和断开功率放大器,并根据需要改变接通与断开时间比例,因此达到调整平均电压的目的,其晶体管损耗较小、效率高,可以输出较高的驱动功率。
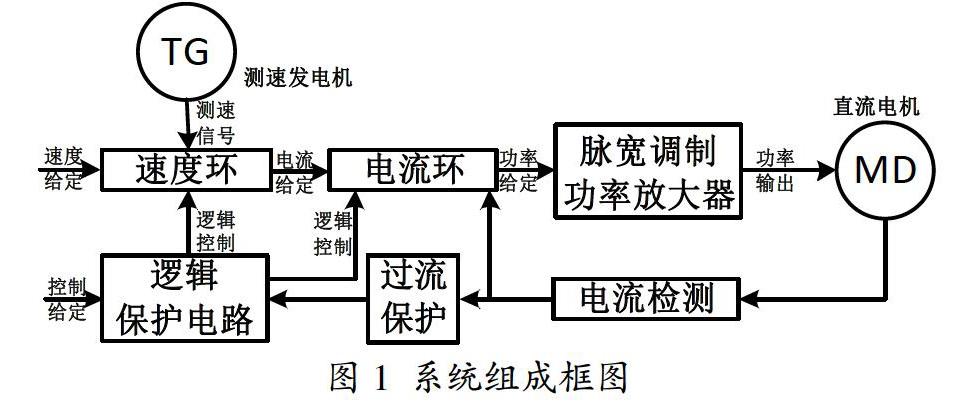
1 系统组成
如图1所示,本设计硬件分别由脉宽调職功率放大器电路、电流检测电路、电流环闭环电路、速度环闭环电路、过流保护电路、逻辑保护电路组成。整个系统可以接收逻辑控制信号来控制系统工作还是禁止,接收外部直流速度给定信号控制电机旋转速度,同时也可以输出系统故障信号。
2 硬件电路设计
2.1 功放电路设计
本设计中使用的脉宽调制放大器信号为SA01,该模块输出连续电流为10A,最大输出电流为20A,具有过流保护外调、脉宽控制外调、使能禁止、过热保护功能,开关频率为300Hz-20KHz,宽温工作,全金属外壳气密封装,体积小、可靠性较高。
脉宽调制放大器电路如图2所示,引脚1、2、14、15为输出端,分别接直流电机的两端,其中一路要先接电流检测电路后再输出至电机;引脚3、4、5为电流传感器,在此因有外部电流检测可以不用;引脚6为地;引脚7为直流信号输出端,信号范围-10V至+10V,再输入小于-9V时,OUTA的占空比为0%,0V时OUTA占空比约为50%,输入大于+9V时,OUTA输出占空比为100%,OUTA和OUTB输出反向;引脚16、17、18为电机驱动电压;引脚13为逻辑电压输入。
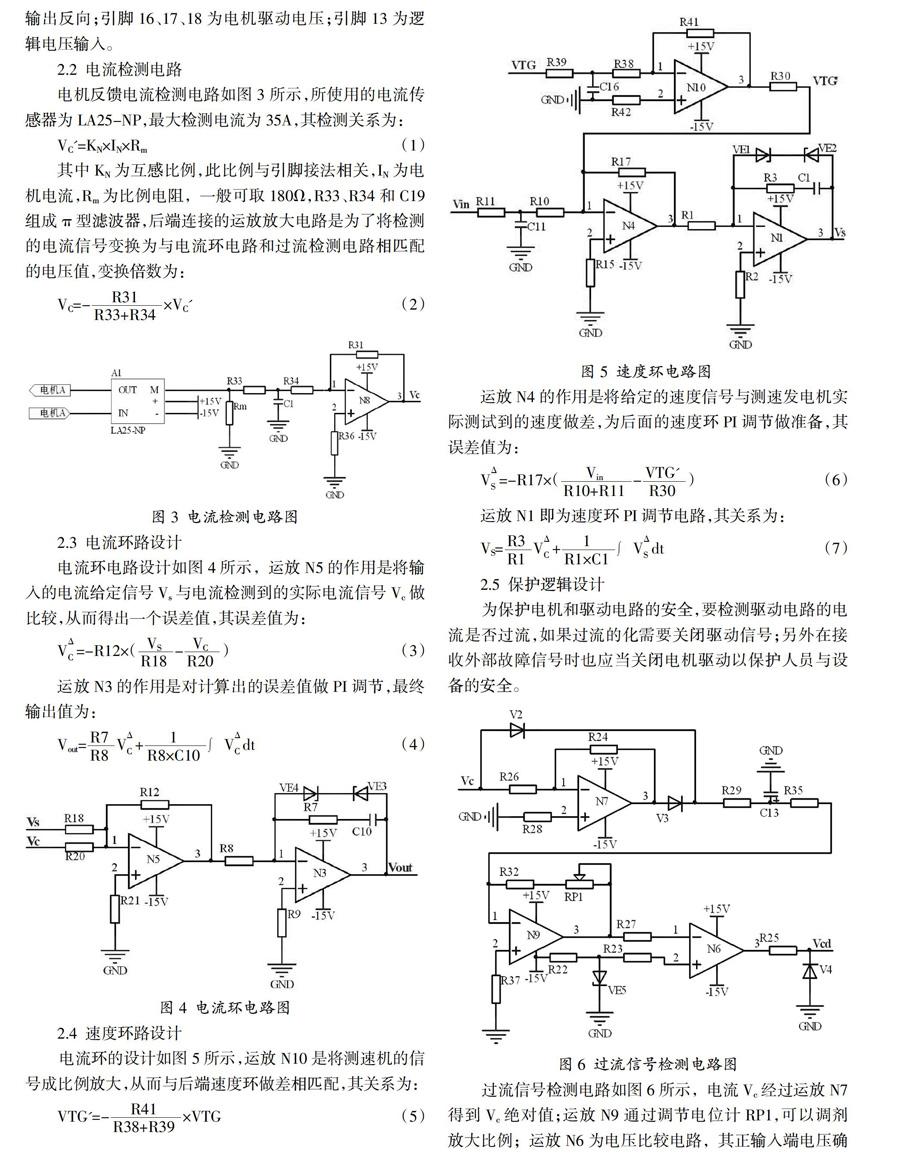
2.2 电流检测电路
电机反馈电流检测电路如图3所示,所使用的电流传感器为LA25-NP,最大检测电流为35A,其检测关系为:
2.3 电流环路设计
电流环电路设计如图4所示,运放N5的作用是将输入的电流给定信号Vs与电流检测到的实际电流信号Vc做比较,从而得出一个误差值,其误差值为:
2.4 速度环路设计
电流环的设计如图5所示,运放N10是将测速机的信号成比例放大,从而与后端速度环做差相匹配,其关系为:
2.5 保护逻辑设计
为保护电机和驱动电路的安全,要检测驱动电路的电流是否过流,如果过流的化需要关闭驱动信号;另外在接收外部故障信号时也应当关闭电机驱动以保护人员与设备的安全。
过流信号检测电路如图6所示,电流Vc经过运放N7得到Vc绝对值;运放N9通过调节电位计RP1,可以调剂放大比例;运放N6为电压比较电路,其正输入端电压确定,负输入端通过运放N9电路可调节,当电机电流大于参考电流时Vcd为正输出,否则为零电压输出。
设计的逻辑保护如图6所示,逻辑芯片为4路与非门CD4011,SE55芯片与其它阻容组成延时电路。当Vcd为零电平时为电机正常工作,此时SE555中的C13充电完成,当电机过流时,Vcd跳变为高电平,C13开始放电,放电时间约为:
3 参数整定
在调试过程中最为重要的调试就是电流环路和速度环路的PI调节,在此以图4中的电流环路为例进行PI参数的整定,其中比例系数为:
在工程应用调试时,首先去掉电路中的积分项,即先把C10短路,此时为纯比例电路,将输入设定为最大输入值的60%,调节R7的阻值,是Kp逐渐增大,直至系统产生振荡,然后再反过来逐渐减小R7的阻值,直到系统振荡消失,记录此时R7的阻值,然后选用0.6倍R7阻值的电阻代替R7,此时即为确定的Kp值;确定比例系数后选择一个较大的电容代替C10,将之前的短路去掉,然后逐渐减小C10的容值,直至系统产生振荡,然后反过来逐渐增大C10的容值,直至系统振荡消失,记录此时C10的容值,然后选用1.5倍的电容替代,此时就完成系统PI的调试,然后通过测试系统的阶跃响应对相关阻容做小范围调节即可。
4 实际测试结果
对设计的驱动电路进行实际测试,主要测试速度环的阶跃响应和各个速度的运行精度。
测试的速度环阶跃响应如图7所示,速度环响应迅速,超调较小,小于10%。各速度运行曲线如图8所示,各个速度运行平稳,误差不超5%。
5 结论
根据本文设计,研制出的伺服驱动器经过实际测试,该伺服驱动工作稳定可靠,性能良好,完全符合工程应用,验证了相关理论和整定方法,对相关设计具有一定的借鉴意义。
参考文献:
[1]胡发焕,杨杰,邱小童.大功率直流电机驱动电路的设计[J].机械与电子,2009(10):77-80.
[2]韩海云,刘军,秦海鸿,等.永磁同步电机伺服系统速度环优化设计[J].现代雷达,2013,35(1):63-67.
[3]陈永刚,阎秋生.基于速度环增益调度PI算法的直线电机控制系统设计[J].制造业制动化,2013,35(6):107-113.
[4]殷留留,韩森,王芳,等.基于L298N的直流电机调速系统的设计与应用[J].信息技术,2017,6(24):104-107.
[5]吴战武,马可,袁潇,等.基于速度和转矩的电机混合驱动控制方法研究[J].兵器装备工程学报,2019,40(3):92-97.
[6]杨林,刘曰涛,沈宝民,等.无刷直流电机PI控制系統的设计及分析[J].西安工程大学学报,2019,33(1):81-87.
[7]徐莉.直流电机控制方法的Matlab仿真研究[J].现代电子技术,2016,39(3):151-15.
