穿戴式下肢复健辅助行走装置结构优化设计
2020-06-28陈虹宇
陈虹宇
(电子科技大学成都学院电子工程系,四川 成都 611731)
脑卒中偏瘫患者康复训练的主要目标是提升其步行能力。步行功能障碍往往是降低脑卒中患者生活质量的主要因素。因此,近年来,许多医疗设备研发机构对于如何开发能够提升脑卒中偏瘫患者步行能力的设备做了大量研究,并取得了一定的成果。文献[7]针对下肢外骨骼的行走过程研究中,采用了摆动模式的动态识别装置。在符合人体工学的基础上建立动力学模型,使脑卒中偏瘫患者不仅可获得行走辅助训练,还能让下肢肌肉在辅助行走的时候正确施力,避免脑卒中偏瘫因无法正确行走而导致肌肉畸态施力。临床研究表明,异常的运动模式对于人体运动的稳定性、安全性都会造成不利的影响。故有必要设计一种符合人机工程学的步行训练机构。因此,本文结合文献[10]的研究结论,设计并优化了一种减重式辅助穿戴式下肢复健辅助行走装置助行机器:为确保患者使用时保持行走的正确姿势,在设计中运动过程的时候充分考虑患者使用产品时的安全性和舒适性,从而在运动康复训练中获得安全健康且舒适的效果,
1 系统机械结构设计
在不同的条件下,助力下肢外骨骼的运动学模型也是不相同的。因此,为解决该问题,采取了穿戴式复健方法,通过固定于大腿外部的大腿外骨骼,固定于小腿外部上的小腿外骨骼两部分传动装置,在中控电机带动下,可通过护腰上的吊带支撑一部分身体重量,整体系统实现辅助患者安全的进行康复运动训练。所设计的护腰通过束带安装在训练者腰部外侧,并且内径可调。大腿通过安装腿部外骨骼的方式实现支撑受力,将连续圆周向上支撑力作用于大腿的外骨骼部分,达到在行走中实现抬腿运动的目的;膝弯处连接护膝,通过另一部伺服电机的控制抬动小腿向前或后的圆周摆动,进而使小腿外骨骼部分实现向前迈步功能;作为向前支撑人体行走时的动力来源,通过腰部护腰上伺服电机与大腿顶端梅花连轴器相连,并通过向上拉吊带支撑人体,向下作用于训练者肩点,再通过脚底踩压弹簧的设计,使整个机械结构克服了死点位置。应用中控电机预设程序,在准备开始进行康复训练时就完成腰部起吊减重,一台伺服电机抬大腿部支撑减重且控制运动方向、一台伺服电机抬小腿部支撑减重且控制步幅的模式并模块化的设计,可以针对下肢有多个部位受损的患者使用。根据上述思路,下肢康复助行器的三维模型如图1 所示。
2 行走装置 结构设计及有限元分析
由图1 所示的可知,行走装置护腰结构上的伺服电机和大小腿部外骨骼相连处的伺服电机为系统关键传动结构,而其中大腿外骨骼最重要的承载部件,沿上方大腿外骨骼承受的是护腰结构上的来自伺服电机运行的扭矩,再由传动通过能量传动,其沿向下的方向承载小腿外骨骼的输出扭矩,从而带动患者进行抬腿作用。同时,因为结构的质量很轻,即使经过简化分析,对系统整体的受力而言,影响微乎其微,可以忽略,因此,系统可以进行适当简化。
根据人机工程学原理,本文中给定设计极限的额定参考数值,参数选择按照人体尺寸标准数据和成年人人体惯量参数设计机械结构最大承重载荷为100kg,使用高度不大于1.9m。为增大评估准确系数,将结构受力状态放大并理想化为最大受力值980N,腿部外骨骼的材料拟确定为45#钢,其屈服极限为335MPa。将建立的三维立体结构模型导入有限元分析软件中进行有限元分析,为确保计算的精度,材料的选择与腿部外骨骼材料一致,均为45#钢。通过软件计算输入参数后,有限元分析结果如图2 所示。该计算结果中,最大应变为8.725e-004,最大位移为7.189e+000mm,最大屈服准则为5.300e+008N/M^2,因此,该设计方案基本能够确保系统的安全性及稳定性。
3 结构优化设计及有限元分析
根据行走机构的有限元分析结果可知,机构基本能保证患者使用时的安全性。再下一步的优化设计中,从产品安装、运输便利等因素考虑,优化设计时,将原方案的焊接关系配合修改为栓接关系,并在大腿外骨骼结构上打一个减重孔,各部分管件的材质及受力情况保持不变。通过软件计算输入参数后,有限元分析结果如图3 所示。

图1 行走装置三维模型
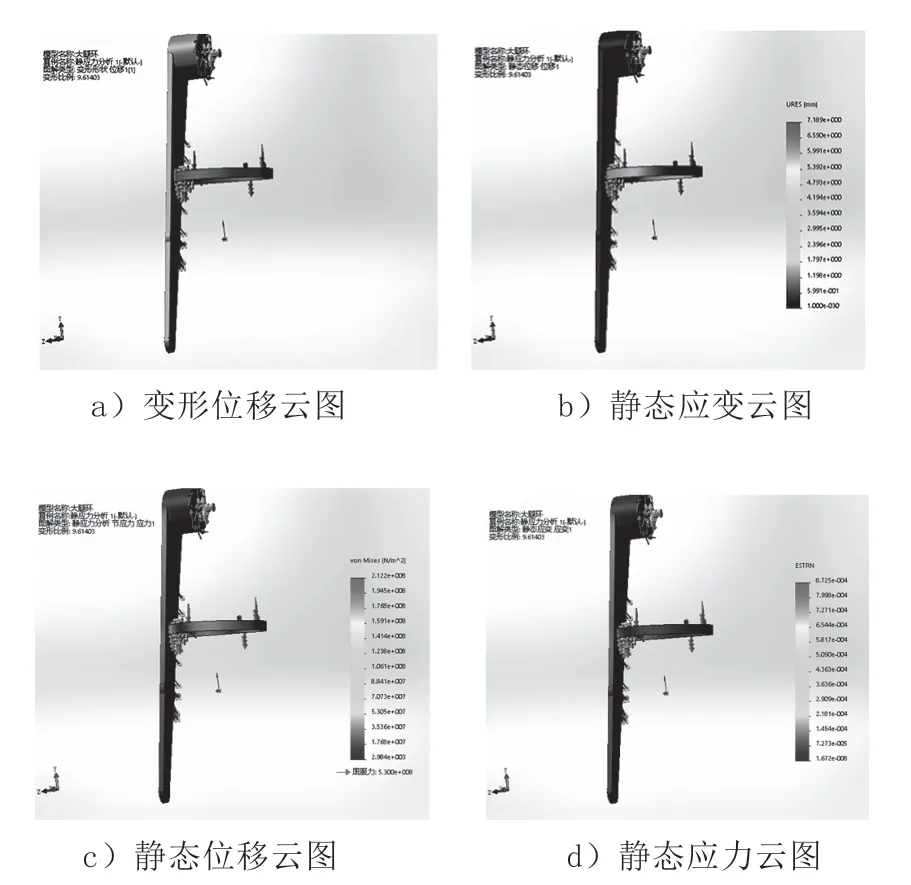
图2 电机安装结构有限元分析结果

图3 大腿支撑件安装结构有限元分析结果
在不影响机构安全性的前提下进行有限元分析,整理有限元分析优化结果得出的数据结果整理得表1。

表1 机械结构设计优化分析结果
在最初的设计方案中,大腿外骨骼质量过于轻便(1.017kg),明显不符合器材本身所需的安全性能,从材料上针对性的更变:镁合金改为45 号钢。改进后的方案大腿外骨骼质量适中(7.825kg),从参数分析该方案满足了患者使用器材时所需的安全性要求。在最初的设计方案中,整体结构用焊接结构,但从生产和运输考虑方面考虑,显然造价太高且不利于运输,将整体结构的连接方式从焊接改为栓接,此时,整体的结构质量略大(8.064kg)。因此,对系统进行的优化设计,同时,考虑舒适性等问题,在确定为栓接结构的前提下,先将材料变更为6061 铝和45 号钢搭配使用,从优化方案的结果来看,其结构质量较之前者有所减小(7.691kg)。最后,再按照最大允许形变位移和许用应力进行调整,且打了减重孔后更加方便运输,故从强度、重量以及运输性能等方面来看,优化设计方案均优于原方案。
4 结语
本文设计了一套可以穿戴得减重式下肢复健辅助行走的装置,对机械结构进行了力学分析,并用对该结构进行了强度分析,根据数值计算结果开展进一步优化设计,达到了预期目的。辅助使用者实现对标健康人体运动轨迹运动的健康运动模式,保证患者在使用器材安全舒适时完成健康的行走训练。本文设计的实用新型设备具有质量轻、结构稳定、使用简单,便于运输,益于市场推广等优点。
