多关节机器人与机器视觉通讯接口协议的设计
2020-06-22陈胜利林国强
陈胜利,肖 然,林国强
(河源职业技术学院 机电工程学院,广东 河源 517000)
0 引言
当代工业自动化技术的快速发展,使得机器视觉设备与机器人得到越来越广泛的应用[1]。为了提高效率与降低人工的误操作,近年来出现了很多的机器视觉设备,若机器视觉与机器人之间能相互联动,就可以极大地提升生产效率,同时也能降低因为操作员的某些主观、客观因素所造成的损失。
通过TCP/IP通信协议能够完成机器人与机器视觉的数据交换,使得机器人与机器视觉设备相互得到所需数据,从而相互配合高效地满足各种工业生产工艺的需求,整体提高工作效率,降低生产成本。
1 硬件结构设计
1.1 机器视觉模块
机器视觉模块是一种电脑与光学设备结合的装置[2],通过视觉传感器将现实中所识别的工件转换为二维图像,并通过计算机分析得到图像的各种特征,近一步完成对图像的处理,从而识别图像信息[3]。其主要应用于工业生产、医学制药、环境检测等,代替人眼进行检测分析,通过软件的处理可以识别工件的大小、形状、缺陷等。同时,它能完成7×24 h的不间断工作,其速度、精度均高于人工,误判率、漏判率低于人工,能在危险的环境中工作。
本文采用海康与大华的工业相机所组成的机器视觉检测群组,主要完成对所需检测工件的形状检测、缺陷检测、产品定位和工件分类等。研究视觉算法平台是基于深圳创科自动化控制技术有限公司所开发的系统集成平台CkVisionBuilder,将其作为视觉软件运行基础平台[4]。
1.2 机器人模块
本文的研究对象是一款雅马哈四轴水平多关节工业机器人,该机器人带有X轴和Y轴2个水平关节操控装置,同时前端还可进行上下运动(Z轴)和旋转(R轴),机器人前端拥有通用接口,可安装一些夹具,例如吸盘、电磁铁等,通过此类夹具,可以使得机器人拥有抓取工件的能力。
通过伺服电机驱动,使得机器人能快速准确地定位及抓取工件。机器人运行速度快,可高效地完成所分配的工序。设计所采用的机器人为YAMAHA RCX340[5],它采用4个伺服电机,具有精准性高、转速快、抗过载能力强、运转平稳、响应时间短的特点[6]。为验证通讯协议程序的成功运行及运行稳定性,开发了一种基于机器视觉检测和机器人分拣等功能于一体的四位一体机器视觉分拣实验台。实验台装置和电气控制原理分别如图1和图2所示。
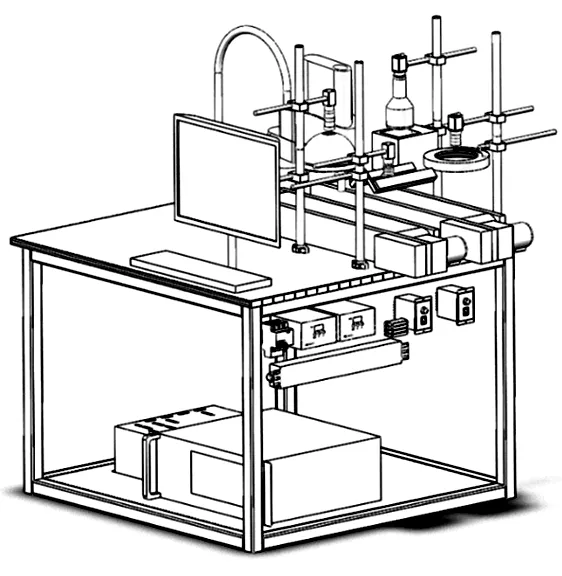
图1 四位一体机器视觉分拣实验台
2 实验台功能
本实验台拥有4套机器视觉系统,可独立进行实验,主要功能如下:①缺陷检测:通过检测对象与模板进行数据对比,检测其特征符合度;②尺寸测量:通过机器视觉对工件的尺寸进行测量,通过所得到的像素数量,再进行标定转换得到工件实际尺寸;③坐标定位:通过软件算法将视觉系统的像素坐标转化为机器人的实际坐标,为机器人提供工件所在位置,从而进行工件抓取;④字符验证:通过学习模板进行字符验证,检查工件字符上的漏印、变形等问题。
3 通讯协议构建
本系统通过TCP/IP通信协议进行数据交换,使得机器人接收到机器视觉发送的工件抓取点信息来完成机器人的抓取动作。通过机器视觉软件处理得到工件的形状、缺陷、字符等特征,通过第三方软件平台发送数据使得机器人完成工件的分拣。
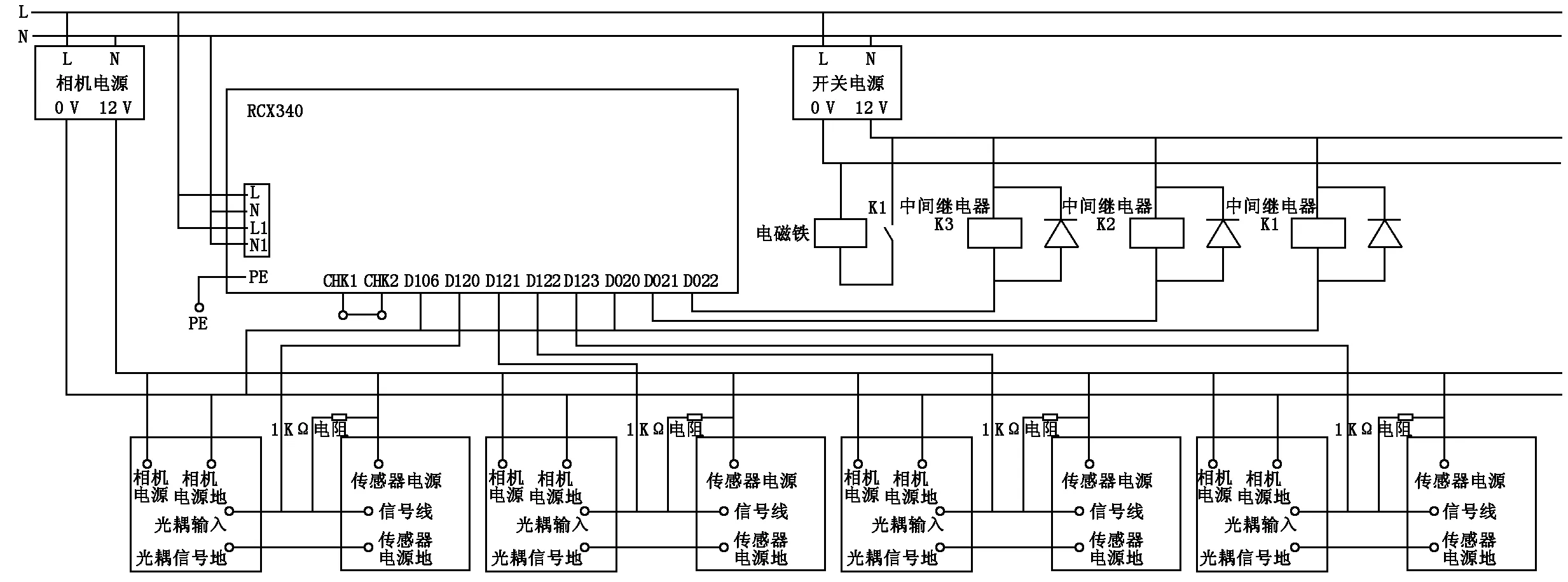
图2 实验台电气控制原理图
TCP/IP通信协议读取机器视觉所得坐标程序如下:
HIGHT1!=0 '复位高度
HIGHT2!=5 '抓取等待高度
HIGHT3!=47 '抓取高度
HIGHT4!=50 '放料高度
X!=0.0
Y!=0.0
STATE%=0
MOTORON
……
OFFLINE ETH
DELAY 200
ONLINE ETH
ASPEED 10
GOTO *SUB00
*SUB00:
STA$=""
SEND ETH TO STA$
SELECT CASE STA$
CASE "100"
GOTO *SUB11
CASE "1"
STATE%=1
GOTO *SUB01v CASE "2"
STATE%=2
GOTO *SUB01
END SELECT
GOTO *SUB00
*SUB11:
DRIVE(3,HIGHT1!) '上升到复位高度
WAIT ARM
MOVE P,P41 '移动到等待位
WAIT ARM
GOTO *SUB00
*SUB01:
XY$=""
X$=""
Y$=""
SEND ETH TO XY$ '从网络读取坐标数据放到XY$
X$=MID$(XY$,1,8) '在XY$上提取第1~8位字符放到X$
Y$=MID$(XY$,9,8)
X!=VAL(X$) '将字符串转换为数值
Y!=VAL(Y$)
LOC1(P41)=X!'
LOC2(P41)=Y!'
DRIVE(3,HIGHT1!) '上升到复位高度
WAIT ARM
MOVE P,P41 '移动到等待位
WAIT ARM
DRIVE(3,HIGHT1!) '下降到取料高度
WAIT ARM
DO(22)=1 '开启取料
DELAY(100)
DRIVE(3,HIGHT1!) '上升到复位高度
WAIT ARM
IF STATE%=1 THEN
MOVE P,P43 '移动到抛料位1
ENDIF
IF STATE%=2 THEN
MOVE P,P44 '移动到抛料位2
ENDIF
WAIT ARM
DRIVE(3,HIGHT1!) '下降到抛料高度
WAIT ARM
DO(22)=0 '开启抛料
DRIVE(3,HIGHT4!) '下降到抛料高度
WAIT ARM
MOVE P,P41 '移动到等待位
WAIT ARM
GOTO *SUB00
4 总结与展望
通过运行及在线监测上述通讯协议,有效地解决了以深圳市创科CkVisionBuilder视觉软件为平台的第三方视觉系统与雅马哈多关节机器人之间的TCP/IP通信数据交互问题。利用机器视觉高精度的特点,实现了对工件拾取坐标的精确定位,大幅度提高了机器人定位与追踪的精度,克服了因生产环境的变化所带来的不确定性,成功地解决了实际生产中因现场环境所造成的机器人的误差定位问题。该协议成功地完成了机器人与机器视觉的数据交换,完善了工业生产的全自动化,提高了工作效率。
