海上浮标漂移轨迹预测分析系统研究
2020-06-19袁理任虹鲁佩仪王梦佳
袁理 任虹 鲁佩仪 王梦佳


摘要:浮标是重要的水上助航标志,航道环境复杂,浮标漂移甚至丢失的情况频繁发生,为保障浮标的财产安全,避免漂浮成为水上障碍物,准确预测浮标漂移轨迹十分重要。本文根据浮标漂移原理,基于蒙特卡洛方法,利用WebGIS方法建立能够在网页端使用的海上浮标漂移跟踪预测分析系统。系统能够自动接入环境数据,依据浮标参数信息,利用SARMAP模型进行漂移模拟计算,预测浮标漂移轨迹与最优搜寻区域。通过具备遥测数据的浮标漂移案例验证,证明本系统模拟预测的浮标漂移轨迹具有较强的实用性。
关键词:浮标;蒙特卡洛;漂移模型;漂移轨迹;预测
中图分类号:P731.23文献标识码:A
0引言
浮标作为使用数量最多、应用最为广泛的水上助航标志,大量使用于各通航水域。长江口上海港航道通航密度大,潮流复杂,经常会发生浮标被碰擦或碰撞造成浮标发生漂移的事故。同时,浮标在海面风、海流、浪等环境动力因素以及外力作用下也会发生漂移,航标管理部门由于缺少相应的“浮标漂移轨迹预测”分析手段来判断浮标漂移的方位和漂移轨迹,难以在第一时间发现并捕捉浮标。因此,为降低捕捉漂浮的时间、人力物力成本,可以利用现有海洋水文气象环境信息,引入水上搜救模型来推算浮标及其他水上助航设施的漂移轨迹,以提高辖区水上浮动标志漂移后的捕捉成功率和效率,进一步提升航标应急反应能力和航标助导航服务水平。
因此,设计一个海上浮标漂移跟踪服务分析系统,不仅可以提高航标日常管理工作中搜寻、捕捉漂移浮标的成功率和效率,而且可以服务于通航安全和水运经济发展的需求,既有效提升辖区助航应急保障能力又能够为国家挽回大量经济损失。
1原理与方法
海上漂移的浮标在风的作用下会沿着与风向成一定夹角的方向漂移,可以将风压漂移速度分为与风向一致的DWL和垂直风向的CWL两部分。国家海洋环境预报中心开发的海上失事目标搜救应急预报系统闭基于四阶精度的拉格朗日漂移路径模型预报了落水人员的漂移轨迹;以及挪威海和北海的搜救模型,其流场计算采用POM(PrincetonOcean Model)模式,并采用了蒙特卡洛算法确定搜寻区域,计算效果较好。海上试验方法对于风致落水人员的漂移影响研究比较有效,但是对于海上浮标的漂移轨迹分析又存在一定局限性,不同的浮标类型需要重新进行试验,因此亟须建立一种数学模型采取力学理论的方法预报浮标的漂移轨迹。
海面漂浮物主要受風、流、波的影响,通过对其分析可以得,风对海面漂移物速度的影响主要有两个方面,一是风对物体上部的力即暴露空气中的部分产生的拖曳力,二是海水流动。同时,当海水受风生流和海流的共同作用就会对漂移物产生拖拽力,波浪也会对漂移物有推动作用。海面以上的风力作用受到空气密度、物体本身的拖曳力系数、露出水面的部分等因素影响。海流产生的拖拽力是海洋表面大范围内海水定向流动造成的。考虑海流的条件是当遇险点距离海岸25n mile范围外或者当海水深度大于100m时,而表层海流是影响浮标漂移的主要因素。根据文献的研究,浮标露在海面的体积与波浪的波长比较起来要小很多,波浪不因浮体而散射或反射,几乎全部透过,此时波浪作用力很小,可以忽略,因此本文不作考虑。
对锚链断裂,发生自由漂移的浮标的运动轨迹进行模拟预测,关键是获得合适的流场和风场,建立合适的海上漂移模型。以往的漂移预测中,计算漂浮物的位置一般预测当前最有可能所在的某一区域,漂移速度V入=V水+aV风其中,a作为风因子,很大程度上要依靠经验来决定。根据《国际航空和海上搜救手册》,目前各国海上救助部门对于入水目标的漂移位置的确定,基本上是根据事故发生时或者人员落水时的风压和总流压差的叠加运算即二者的矢量合成得到漂移方向及速度,最后利用拉格朗日追踪法模拟漂移轨迹。考虑到海面上的风场和流场在不断变化,并非稳定,而风因子a值受外在环境影响较大,导致区域计算结果的漂移误差具有随机性和不可预测性,所以仅仅依靠有限个参考基点对救助目标的漂移作出预测是不可靠的。为了降低搜救区域的计算误差,本文根据浮标漂移区域的变化,利用蒙特卡洛方法,构造—个概率模型,使模型的参数等于问题的解,然后通过观察模型得出参数的统计特性,最后给出所求解的近似值。
蒙特卡洛法又称统计模拟方法,是非常重要的数值计算方法,在20世纪中期由于电子计算机发明,提高了计算效率而被提出的一种重要方法。1972年,美国海岸警卫队首次将蒙特卡洛法应用至搜救作业系统中。蒙特卡洛法的原理是把目标抽象成一组相互独立的粒子集合,根据建立的漂移模型,由漂移速度来估算各粒子的运动轨迹。粒子在海面上的漂移运动满足马尔科夫过程,因此粒子集未来所处位置的概率密度函数仅仅依赖于海洋环境状态。蒙特卡洛法运用了统计学的方法,通过引入粒子仿真法能够模拟目标漂移计算过程中所有不确定因素,同时能够有效地结合逐渐丰富且精确的海洋环境动力数据。此外当模型进行数值计算时,可以使用分布式运算使模拟过程分布独立进行,能够快速获取结果。
基于浮标漂移模拟预测模型,综合利用计算机及网络信息化技术,建立一个结构合理、使用舒畅、结果呈现清晰的浮标漂移跟踪服务分析系统。参照《国际航空和海上搜救手册》,利用浮标漂移模型基本原理,结合蒙特卡罗方法建立浮标漂移分析预测模型。自动接入气象模式数据、用户自定义环境数据及其他时空环境数据,作为模型动力条件。基于WebGIS方法建立平台,用户输入模型参数,在线驱动浮标漂移预测分析模型。
2系统介绍
2.1系统架构
海上浮标漂移跟踪预测分析系统采用B/S端的三层架构模式,即由WebGIS图形交互界面、网络服务和空间关系型数据库三大部分组成。
本系统界面基于HTML5/JS前端开发语言、Vue前端开发框架开发而成,用户通过访问浏览器就可以直接完成与系统平台的人机交互操作,无需安装额外的插件或程序,使用非常简便。我们将WebGIS技术应用到海上浮标漂移跟踪预测分析系统界面的构建中,使得浮标遥测实际轨迹、浮标漂移预测结果信息可以通过与不同类型的在线网络地图叠加进行直观清晰的展示。
而通过数据传输服务、模型服务、地图服务、分析服务、管理服务等WebService核心服务与服务器端存储系统所需资源的空间关系型数据库进行数据交互,实现海洋气象模式或自定义环境数据的无缝接入、浮标漂移预测模型运算与模拟结果地图快速叠加展示等系统主要功能。
系统开发中我们选用开源空间关系型数据库PostgreSQL作为核心数据库,并添加POSTGIS空间扩展模块,来增加PostgreSQL数据库在存储管理空间数据的能力。系统应用所需的数据层主要包括基础地理信息数据库、系统管理数据库、模型数据库、EDS数据库和搜救对象数据库。
2.2功能设计
系统支持用户使用SARMAP搜救模型进行浮标漂移预测(见图1),并提供浮标漂移行为参数数据。浮标漂移在线实时更新预测是系统的核心功能。通过在界面输入浮标漂移基本参数(包括浮标类型、最后已知位置坐标及对应时间或最后已知航线信息和对应时间等)、预测分析方法、流场、风场信息等浮标漂移预测模拟的关键参数信息,在线实时提交到服务器端进行模拟运算并将浮标漂移预测结果显示在WebGIS地图界面,同时可以结合浮标最新遥测信号修正预测轨迹和搜救范围结果,能够实现对漂移浮标漂移方向和漂移范围的实时陕速在线更新预测。
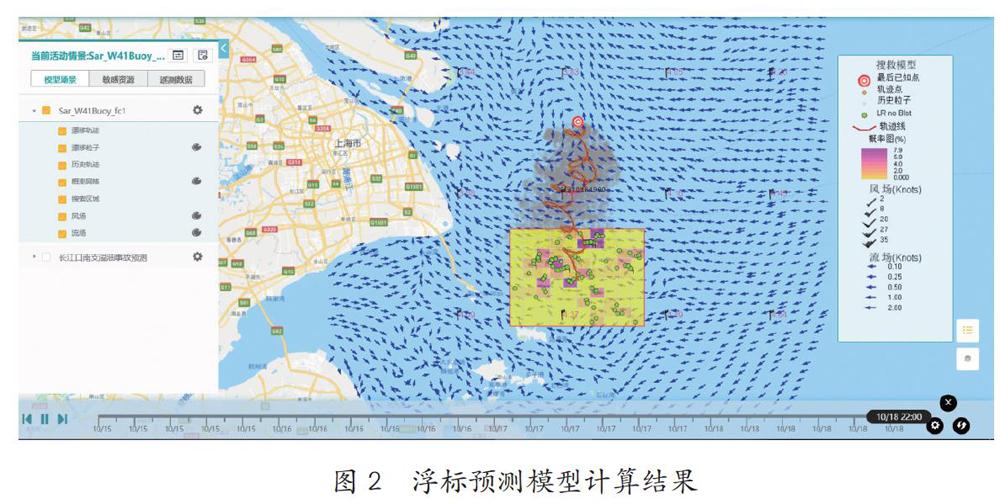
系统提供蒙特卡洛方法和IAMSAR方法供用户选择进行浮标漂移预测分析,漂移起始点位置支持在地图上直接选取或输入经纬度坐标。系统提供全球GFS风场和HYCOM流场或用户自定风场和流场作为模拟计算所需的环境场。系统提供漂移轨迹、漂移粒子、历史轨迹、概率网格、搜索区域、模型风场、模型流场等要素在地图上的动态叠加展示(见图2)。用户可对漂移模型计算结果要素的颜色、标签等自定义设置,并控制需要展示的要素种类。系统能够同时在地图上叠加展示浮标遥测数据生产的实际漂移轨迹,提供预测漂移轨迹与实际漂移轨迹对比,用户可以验证本系统预测分析数据的有效性。
3案例分析与验证
本文利用系统对2.4m钢质灯浮进行漂移模拟,根据浮标材质、浮标形状、浮标大小、浮标重量等信息设置浮标漂移行为参数,录入系统数据库进行漂移模拟。本文回顾了3个浮标漂移案例,以浮标的设置位置作为漂移模拟起始点,利用浮标已有的遥测信息与最后找回的位置等信息验证系统模拟效果。据此对浮标搜救对象数据库进行充实完善并且对浮标搜.aN型进行调参,找到最优参数,实现基于大量漂失样本案例的基础上逐步完善浮标搜救对象数据库,提升系统预测漂移轨迹的可靠性。
3.1S6漂移案例
2018年7月11日,航标值班人员发现S6(中2.4m钢质灯浮)发生漂移,由于S6灯浮安装了航标遥测系统,2h左右会回传灯浮实时漂移的位置,最终在7月15日13:00成功抓回了S6灯浮。
本文以S6灯浮漂移为例,应用系统搜救模型对浮标从设置位置漂移后的漂移轨迹进行预测,并将搜救模型模拟结果与实际遥测的S6灯浮漂移轨迹进行对比来验证系统模型应用的可靠性。图3是根据搜救模型模拟得出的S6灯浮漂移轨迹(图中左:棕色漂移轨迹点)和实际遥测得到的S6灯浮漂移轨迹(图中右:蓝色漂移轨迹点),此时是S6灯浮抓回时刻(7月15日13:00)对应的模型模拟得到的搜索区域和概率网格。结合两图可以看出,总体上,浮标漂移轨迹方向和形态与实际遥测的结果吻合度很高,给出的搜索区域也涵盖了实际抓回海域。浮标从原始固定位置开始漂移时,在向东偏转的北向流和向南偏转的东南风的共同作用下,浮标向东北方向漂移,到7月11日1:00,预测轨迹点与实际遥测位置之间相距1.78n mile。预测结果总体准确,但预测浮标漂移轨迹比实际遥测漂移轨迹要偏左,更靠近沿岸海域。主要原因是海洋条件复杂,会遇到很多突发情况,比如船舶拖拽或二次撞击、渔船拖网等,可能是由于S6灯浮在漂移后被航行的船舶拖带了一段距离导致向外海偏移了4n mile左右,而这部分外界因素没有考虑到模型模拟过程中。
3.2W41漂移案例
2019年10月14日23:01后,航标值班人员发现W41(φ2.4m钢质灯浮)开始出现漂移,在2019年10月15日4:01,W41灯浮上安装的航标遥测系统传回了灯浮漂移位置和距离,最终在10月21日12:02在花鸟山附近被发现,历时约6.5天。从以上浮标漂移案例来看,在遥测位置和距离返回的前2h内,我们看到遥测位置笔直地向东南方向移动,怀疑在此期间受到了拖拽,故验证模拟开始时间选择为2019年10月15日5:00。
本文以W41灯浮漂移为例,应用浮标漂移跟踪分析模型对浮标从设置位置漂移后的漂移轨迹进行预测,并将搜救模型模拟结果与实际遥测的W41灯浮漂移轨迹进行对比来验证此模型应用的可靠性。图4是根据搜救模型模拟得出的W41灯浮漂移轨迹(图中左:棕色漂移轨迹线和墨绿色漂移轨迹点)和实际遥测得到的W41灯浮漂移轨迹(图中右:水蓝色漂移轨迹点),给出的是W41灯浮模拟88h(10月18日21:00)对应的模型模拟得到的搜索区域和概率网格。由于10月18日21:00以后,W41灯浮基本在嵊泗列岛东南侧海域附近打转,可以看出,总体上,浮标漂移轨迹方向和形态与实际遥测的结果吻合度很高,不仅给出的搜索区域也涵盖了实际抓回海域,而且预测轨迹点与实际遥测位置最小的地方相差小于0.5n mile。
3.3“云沉14”号漂移案例
2019年11月19日6:46后,航标值班人员发现“云沉14”号(φ2.4m钢质灯浮),开始出现移动。浮标开始移动后至2019年11月26日16:01,“云沉14”号灯浮上安装的航标遥测系统传回了灯浮漂移位置和距离。
分析上述浮标漂移轨迹得出,在11月19日6:46至11月19日20:54之间,“云沉14”号灯浮径直向东南方向移动;在11月19日20:54至11月24日2:56之间,“云沉14”号灯浮,在半径约为2nmile的范围内打转;在11月24日5:27至11月24日17:03之间,“云沉14”号灯浮在原地打转。因此,可以推测出在上述期间“云沉14”号灯浮受到了拖拽,故验证模拟开始时间选择为2019年11月24日17:33。
本文以“云沉14”号灯浮漂移为例,应用浮标漂移跟踪分析模型对浮标从设置位置漂移后的漂移轨迹进行预测,并将搜救模型模拟结果与实际遥测的“云沉14”号灯浮漂移轨迹进行对比来验证此模型应用的可靠性。图5是根据搜救模型模拟得出的“云沉14”号灯浮漂移轨迹(图中墨綠色轨迹点)和实际遥测得到的“云沉14”号灯浮漂移轨迹(图中水蓝色轨迹点),11月24日17:33浮标漂移了大约131h。图5给出的是“云沉14”号灯浮漂移后模拟47h(11月24日16:33)对应的模型模拟得到的搜索区域和概率网格。11月26日16:48左右,“云沉14”号灯浮漂移至泗礁山岛北部海域,结合两图可以看出,总体上,排除人为因素干扰后,预测“云沉14”号灯浮漂移轨迹方向和形态及最终预测搜寻大概率区域与实际遥测位置较为相近。
4总结与展望
本文基于浮标漂移模型,利用蒙特卡洛方法,采用WebGIS方法建立能够在网页端使用的浮标漂移跟踪预测分析系统。系统能够自动接入或输入风场、流场等环境场,调取浮标参数进行漂移模拟,输出预测轨迹与分布概率。系统已经应用于实际浮标漂移预测模拟,能够很好地支持航标现场管理与运维工作。经与浮标漂移遥测数据位置对比,本系统能够较好地模拟预测浮标发生漂移后的位置。
浮标漂移模型的准确性很大程度上依赖于环境动力场的准确率,因此利用精度更高,准确率更高的风场与流场,能够很好地提高浮标漂移预测模型的准确性。浮标漂移参数的合理性是影响浮标漂移预测的重要因素,但浮标参数的获取依赖于大量试验测试与模拟矫正,因此获取更符合实际情况的浮标参数是大幅提高浮标漂移预测的准确性与可靠性的关键。
由于实际海洋环境复杂多变,浮标在漂移过程中会遇到很多模型没有考虑的外界因素,如船舶撞击、渔船拖网等。今后研究中,可以考虑在模型实际模拟过程中引入浮标实时遥测位置对计算结果进行修正,有利于提高下一步模拟计算的准确性与模拟结果的可靠性,减少外界因素的影响。
在准确预测浮标漂移轨迹的基础上,可以计算目标漂移轨迹及其最终位置的概率分布,进而确定最优的搜救区域。即在搜救区域确定的基础上,寻求一种搜救资源在时间和空间上的最优分配方案。辅助决策者在最短的时间内利用有限的搜寻资源制定搜寻方案以提高海上遇险目标搜寻工作的成功概率。
