近海域25 m双体全自动水面清洁船的总体设计
2020-06-19吴培松
吴培松
(苏州飞驰环保科技股份有限公司,江苏 苏州 215621)
0 引言
我国大陆海岸线全长18 000 km,近年来,随着我国经济的发展,海洋垃圾对海洋环境的污染十分严重。海洋垃圾主要包括海面漂浮垃圾、海滩垃圾、海底垃圾。其中海面漂浮垃圾80%以上为塑料类垃圾(废弃渔网浮漂、生活垃圾),另外还有木制品垃圾,密度最高的区域为各种农渔业区、港口航运区等近海域。入海排污口的不达标排放,浒苔、水浮莲等水生植物污染近海域事件也频繁爆发。另外,某些渔港类近海域也存在渔船偷排废机油等污染物。加拿大、日本、韩国开发过相应的海洋垃圾清扫船,主要收集方式采用铲斗式和抓斗式[1],但国内目前对海面漂浮垃圾水草收集和相关清扫船的研究基本属于空白。该文针对我国近海域漂浮物的实际情况,研发了一种25 m双体全自动水面清洁船。
1 设计方案
25 m双体全自动水面清洁船主要用来收集各类水面漂浮垃圾水草及污油水,同时能将收集的垃圾自动卸载到指定的装载船、岸上、码头、垃圾运输车等适应设备上[2]。该船主要由船体、作业功能装置、上层建筑、动力系统和电气系统等5个部分组成,全面参照CCS《钢质海船入级规范》(2015)、《国内航行海船建造规范》(2012)、《国内航行海船法定检验技术规则2011》,对各大部分进行模块化设计。清洁船的设计流程如图1所示,船体主要结构参数见表1 。
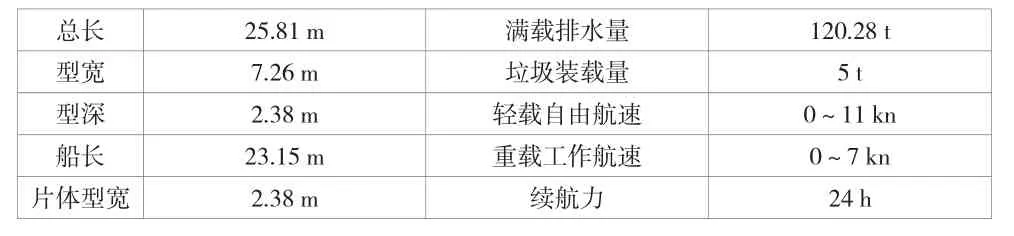
表1 船体主要结构参数
2 详细布置设计
25 m双体全自动水面清洁船的总布置图如图1所示,从船体舱室、主甲板、驾驶甲板三方面详细说明布置情况。
2.1 船体舱室布置设计
该船船体采用双头双体船型,其中包括位于两侧片体和位于中间的连接桥。连接桥的结构按照中国船级社《国内航行海船建造规范》(2015)以及修改通报(2016、2017)第2篇第19章双体船附录1双体船结构强度计算,其中抗扭箱体段约为Fr4(Fr N:指船舶肋位编号,N为0.5 m的倍数,以下同)至Fr4之间。为满足垃圾收集的需要,收集口设置在约为Fr34~Fr40。两侧片体的舱室结构布置包括7个部分。1)艉至Fr3:全封闭艉尖舱,设水密人孔盖。2)Fr3至Fr8:空舱兼压载舱,设出入口。3)Fr8至Fr26:主机舱,布置推进发动机、齿轮箱、推进轴系、前端输出系统。舱段前方设隔离燃油柜,舱中设隔离液压油柜。Fr20至Fr25,左舷为液压系统提供动力的柴油机,右舷为发电机舱。4)Fr26至Fr27:燃油舱。5)Fr27至Fr38:辅机舱,设置对外油水分离装置和污水箱。6)Fr38至Fr43:空舱兼压载舱,设置泡沫储液罐。7)Fr43至艏:艏尖舱,舱内设置锚链舱。
2.2 主甲板布置设计
上层建筑为双层整体结构,为全铝合金结构[3]。主甲板上布置作业功能装置。其中,首部为油污水收集装置,采用喇叭口式收集头,油污吸口宽度为4 m,吸口升降调节高度为水下0~1 m。收集的污油水经过油水分离装置处理后,清水直接排出舷外,污油排至污油箱。主甲板上设有标准排放接头,污油箱污油通过标准排放接头定期排至岸上接收装置。
中部为收集舱、存储舱。收集舱和存储舱之间的输送带由带齿钩高强度尼龙链片、链轴、连接片组成,该种输送带可以各类漂浮垃圾和水草。当漂浮垃圾存放到一定量及高度时,启动存储舱输送带向后移动一段距离,使垃圾继续向存储舱后部移动,继续存放垃圾。存储舱完全包覆在上层建筑内;尾部为卸载舱。该船卸载方式是在船体侧面卸载。卸载舱安装在船体中后部,能伸出船侧2 m,可单独动作。卸载舱通过2个液压缸顶升至一定高度后卸载。收集舱、存储舱、卸载舱均采用液压驱动。
2.3 驾驶甲板布置设计
驾驶甲板前部为上下斜梯和驾驶室,中部为休息室和会议室,会议室后部左右舷分别布置厨房间、卫生间,最后部为休息平台。驾驶甲板尾部左右舷各设有1套电动水炮、1套电动泡沫炮,射程为80 m,电动水炮用于冲散密集漂浮物,电动泡沫炮用作应急消防水泡。
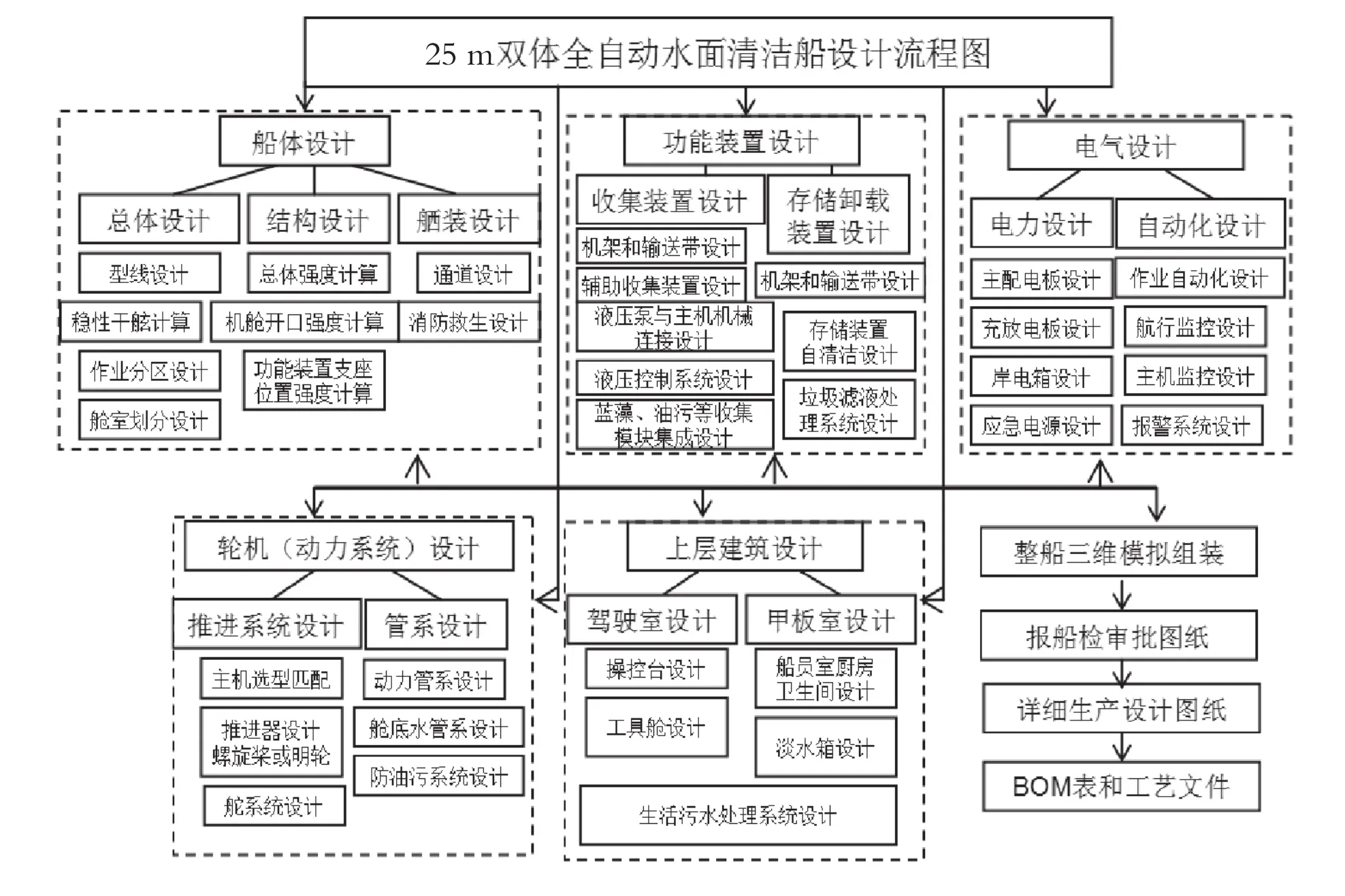
图1近海域25 m双体全自动水面清洁船的总体设计流程
3 动力系统设计
该船采用2台潍柴WD10C278-15柴油机作为主机,功率,匹配杭齿HC201船用齿轮箱[4]。采用一台205 kW柴油机供液压系统和消防炮,另采用一台64 kW发电机组向全船用电设备供电。根据规范要求设置舱底水系统、机舱通风系统和防污染系统等。
4 电气系统设计
该船采用3种电制。1)动力系统采用AC380V,50 Hz,三相三线制。2)照明系统采用AC220V,单相双线制。3)该船监控报警系统、航行灯信号灯、应急照明系统、通讯和导航系统采用DC24V,双线制。按照规范要求配置主配电板、充放电板、助航分电箱、照明分电箱等[5]。该船电气控制系统包括为船舶主机和舵机远程监控系统、收集作业视频远程监控系统和收集装置控制系统[6]。其中,收集作业视频远程监控系统设置在驾控台,船尾、船首、左右机舱、驾驶室等设航行工况摄像探头,在主甲板作业区设作业工况摄像探头,监控系统具备摄像、多画面、回放,储存和传输等功能。收集装置控制系统主要用于工作舱液压缸升降和输送带的运转。
5 结语
该文是对近海域25 m双体全自动水面清洁船的总体设计。船体采用对称片体双体船船型,既满足了稳性、操纵性和安全性方面的要求,又能充分利用双体船片体间的负压吸附机理和船首变曲面吸漂流道线型,实现高效清漂。充分利用船首2个片体之间的豁口增加了油污收集装置,采用输送带式的收集方式和前收侧卸的收集卸载模式,保证了垃圾在收集和存储作业的衔接连续性,可实现垃圾水草日常清扫、应急油污收集和消防作业等多种用途功能,提高了收集效率和作业范围。采用仿游艇式造型,造型美观大方,上层驾驶办公区与下层收集作业区相对独立;驾驶室集中操控的收集作业视频远程监控系统和收集装置控制系统,提高了清扫作业的安全性和舒适性。
