面向渔业水域的水质检测机器人设计*
2020-06-18张泽彤佟石磊卢鸿任杨艺昕陈兴文
张泽彤,徐 喆,佟石磊,卢鸿任,杨艺昕,陈兴文,刘 燕
(大连民族大学信息与通信工程学院,辽宁 大连 116605)
0 引言
在水产养殖生产中,要求对池塘、水库、工厂化养鱼池等多种水体的水质进行实时监控,如养殖场、育苗场水源必须检测确定无化学污染源。养殖过程中,为了预测水质变化趋势,及时调整水质,每天要多次测定温度、pH值,溶解氧、氨氮、亚硝酸盐,硫化物等水质指标[1]。国内用于水产养殖的水质检测仪器一般都是离线式的实验室检测方式,需要取样,检测结果反馈周期长,难以保证水产养殖的安全。
本装置具有成本低、体积小、操作灵活等优点,实现了远程的智能化控制以及水质的检测数据的实时传输。潜在市场需求很大,可以在国内迅速推广,有较好的应用前景和推广价值。
1 系统的整体设计
水质检测机器人主要由电气控制和机械执行两部分组成。电控部分主要由STM32单片机控制模块、浊度传感器模块、pH传感器模块、溶氧度传感器模块、WiFi无线通讯通信模块、驱动模块、电源模块组成,如图1所示。机械部分包括机器人整体结构。

图1 系统总体功能框图
2 硬件部分设计
2.1 pH值测量调理电路
池水的酸碱度(pH值)既影响鱼类的生长生活,又影响到池水中的营养素。而且水环境中出现的任何自然现象、化学变化以及人们渔业生产活动都会带来养殖水域的pH值变化。因此pH测量值是水质检测的重要指标。目前在水质环境监测中应用较广的是玻璃电极传感器,其具有测量范围宽、重复性好、稳定性高、精度高、环境适应范围广等特点。本系统中选用上海雷磁E-201-C可充式pH电极传感器,采用玻璃电极和参比电极组合在一起的复合结构,电压毫伏级输出,具有输入阻抗高的特点及温度与电压自动补偿功能[2]。其测量是利用玻璃电极与参比电极的电位差的输出数值和被测液体的pH值呈线性关系实现的。
当复合电极形成的电位差等于零时,表明被测溶液的pH值为7(即为中性);当复合电极形成的电位差小于零时,表明被测溶液的pH值大于7(即为碱性);当复合电极形成的电位差大于零时,表明被测溶液的pH值小于7(即为酸性)。为了满足STM32单片机的A/D接口的电平大小和极性以及传感器的高输入阻抗特性的需求,pH值信号检测与调理接口电路如2图所示。

图2 pH值信号检测与调理接口电路
2.2 浊度测量调理电路
水的浑浊度主要由水中的无机物和有机物引起,浑浊度过高可影响水味和颜色,其中颗粒物可以吸附或包藏病毒和细菌等有毒有害物质。浊度测量原理是利用传感器模组内部集成红外对管的发射与接收,利用接收管光强与输出的模拟电压之间线性来测量的,实际就是采用散射率和透光率来综合判断浊度值。当水质清澈时,光线的穿透量就越大,对应的输出电压信号就大;反之则表示水质越浑浊。其调理接口电路如图3所示,传感器输出的信号经过C1的滤波处理,再经运放进行放大处理,最后将信号输出到STM32的A/D转换器,转换后的值可直接用STM32进行处理。

图3 浊度传感器调理电路
2.3 溶氧度调理电路
系统应用极谱式原理的DO溶氧电极来测量,以铂金(Pt)作阴极,Ag/AgCl作阳极,电解液为0.1M氯化钾(KCl)。测量时,在阳极和阴极间加上极化电压,氧通过渗透膜在阴极消耗,透过膜的氧量与水中溶解氧浓度成正比,因而电极间的极限扩散电流与水中溶解氧浓度成正比,通过检测此电流并经运算变换成氧浓度。同时热敏电阻检测溶液的温度,并对溶氧浓度进行温度补偿。其调理电路接口如图4所示。

图4 溶氧度调理电路
2.4 控制系统设计
机器人控制系统主要由STM32主控板、机舵机驱动、A/D采集以及水陆图像传输等组成。由STM32主控制板发出对水上机器人的运动及水样数据采集等命令。当系统开始工作时,通过遥控器发出WiFi串口控制指令,STM32接收到指令后,启动巡游水质采样工作[3]。
为保障能够避开水面上障碍顺利开展采集工作,系统采用利用WiFi数据通信对水面作业情况进行图像采集。其具体过程是手机端与机器人端的路由器之间无线通信,STM32单片机串口与路由器相连,这样实现了水陆之间无线通信。图像采集使用数字摄像头,通过手机端启动就可以实时显示水面作业的情况。
3 系统程序流程设计
使用C语言对机器软件控制系统进行设计,由运动控制、传感器采集、无线通信模块三部分功能程序组成。首先初始化系统进行设定系统的初始信息设置,机器人通过接收地面端控制信号来控制机器人。当接收到运动信号时,通过指定引脚输出不同占空比的PWM波信号来控制舵机的摆动,从而实现机器人的前进、转弯动作。当接收到传感器采集信号时STM32将启动A/D转换,通过传感器采集水质的情况,并通过无线通信模块将采集到的水质信息传送到地面工作人员。系统的程序流程如图5所示。
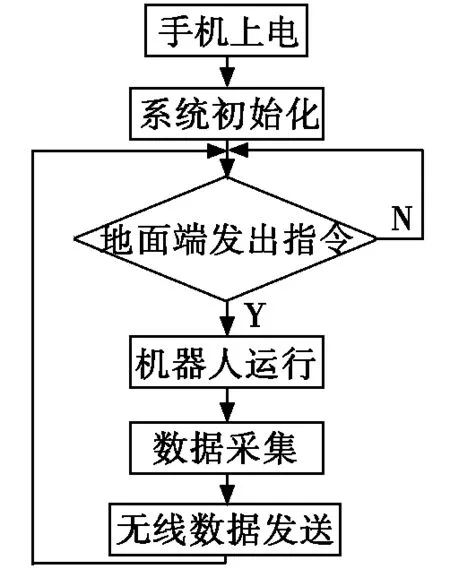
图5 软件流程图
4 结束语
水上机器人在当今的各个领域中被广泛使用,本装置通过各个传感器的配合,对水质进行实时检测,是多学科应用的新探索,也是对水质多参数实时、动态、连续监测测量前期工作的新尝试。水质检测机器人在其他科学领域也有广阔的应用前景,它的应用使水质检测技术向智能化、自主化又迈进了一步。
