基于超声波与ZigBee的车位检测系统实现
2020-06-15姜俊杰姚锡凡张毅
姜俊杰 姚锡凡 张毅
摘 要: 为了满足智能停车场对车位状态监控的需求,便于停车场的运营,开发了一种可实现多车位状态检测的系统。首先,使用HC?SR04超声波测距模块采集车位状态数据;然后,使用CC2530开发板和ZigBee技术组建无线系统的协调器和终端设备,传输车位状态数据;最后,使用Visual Studio 2010设计上位机以接收RS 232串口数据,显示车位状态,且计算出停车时长和停车费用、车位总数以及剩余车位数量。经测试表明,所设计系统可达到预期效果,具有实用参考价值。
关键词: ZigBee技术; 车位检测; 超声波测距; 数据接收; 无线传输; 串口通信
中图分类号: TN92?34 文献标识码: A 文章编号: 1004?373X(2020)07?0121?05
Realization of parking space detection system based on ultrasonic and ZigBee
JIANG Junjie1, YAO Xifan1, ZHANG Yi2
(1. School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510640, China;
2. Department of Mechanical & Electrical Engineering, Guangdong Communication Polytechnic, Guangzhou 510800, China)
Abstract: In order to meet the demand of intelligent parking lots for monitoring the status of parking spaces and facilitate the operation of parking lots, a detecting system of multi?parking space status was developed. The ultrasonic ranging module HC?SR04 is utilized in the system to collect the status data of parking spaces. The coordinator and end devices in the wireless system are set up with CC2530 development boards based on the ZigBee technology to transmit the status data of parking spaces. An upper computer is designed with Visual Studio 2010 to receive the data from RS 232 serial port, display parking space status, and calculate the parking time, parking charge, the number of total parking spaces and remaining parking spaces. The testing result indicates that the designed system can achieve the desired effect and has practical reference value.
Keywords: ZigBee technology; parking space detection; ultrasonic ranging; data acceptance; wireless transmission; serial port communication
0 引 言
21世纪以来,我国的经济已经得到了迅速的发展,汽车制造产业也在科技革命的推动下迅猛发展,其保有量的年增长率也越来越高,极大地方便了人们的日常出行,使人们的生活水平不断提高[1]。但我国两亿八千一百万辆的汽车数据量无疑会使我国交通运载能力面临巨大的压力。基于停车难的现实,发达国家于20世纪60年代提出了停车诱导系统(Parking Guidance System,PGS)[2]。实现PGS关键技术之一就是依靠车位检测技术来监测有无停车,其中常用的车位检测方法有:感应线圈检测[3]、地磁检测[4]、超声波检测、红外检测[5]、视频车位检测[6]。前两种方法安装维护成本高,在实施时会破坏停车场[7],后两种方法的检测精度易受环境影响,而超声波检测则具有成本低、寿命长、稳定性相对可靠的优点。
进入21世纪,无线通信技术逐渐成为主流,从而取代了架设操作复杂的有线通信方式。常见的无线通信技术包括蓝牙,WiFi,ZigBee,NFC等,其中,ZigBee技术因其低功耗、低成本而受到许多应用领域的青睐[8]。ZigBee用于大型停车场领域具有如下优势:不必担心网络容量的问题[9]; ZigBee能更快定位找到车辆;可以构造星型、树型和网状三种网络拓扑结构[10],保证无线数据传输的高效与可靠。
智能停车场系统的发展离不开先进可靠的车位检测技术、数据传输方式以及功能强大的停车软件,因此本文着重研究车位检测系统。
1 总体设计
1.1 总设计方案
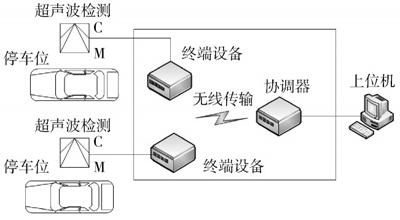
一个完整的停车诱导系统包括以下四部分:车位信息采集、车位信息处理、车位信息传输和车位信息发布[11]。本文的车位检测系统着重实现其中的第一、第三和第四部分功能,因此,将总设计方案分成以下三个部分:车位信息采集、车位信息传输和车位信息显示,总设计方案图如图1所示。
1.2 车位信息采集
通过传感器实现停车场车位信息的实时采集[12],需要选择车位检测方式以及相应的控制器。超声波检测方式与其他方式相比,具有便于安装、体积小、技术成熟、工作寿命长的优点,因此选用超声波检测方式。具体采用HC?SR04超声波测距模块,此外,选用TI德州仪器公司生产的CC2530F256芯片作为控制器。
1.3 车位信息传输
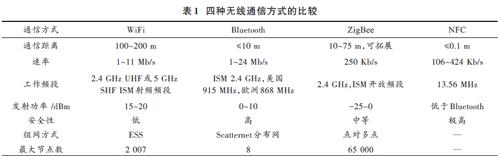
实现车位数据采集终端与显示平台之间的数据通信,需要选用合适的通信方式和设备。表1对常用的四种无线通信方式进行对比,考虑到一个停车场多车位的实际情况,满足使用条件的有WiFi和ZigBee两种。与WiFi相比,ZigBee具有更低的发射功率、更高的安全性和自组网的特点,因此,选用ZigBee技术完成车位信息的传输。
1.4 车位信息显示
显示部分利用Visual Studio 2010设计一个上位机平台,通过RS 232串口传输[7]接收来自ZigBee协调器的数据,在平台上显示当前时刻、测距结果、车位占用情况(红色即被占用/绿色即空)、停车时长和停车费用、车位总数以及剩余车位数量等。
2 基于超声波的车位检测
2.1 实验硬件
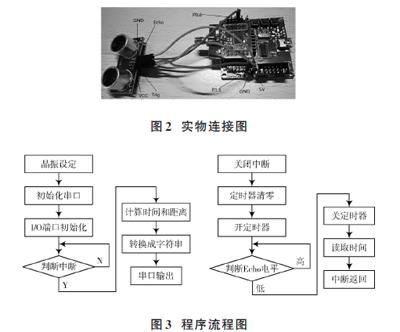
如图2所示,单个车位检测所用到的硬件包括一块CC2530F256开发板(图中右侧部分)、一个HC?SR04超声波测距模块(图中左侧部分)、杜邦线以及下载器。HC?SR04模块与CC2530F256开发板通过杜邦线连接,即GND与GND、VCC与5 V引脚、Trig与P1.1、Echo与P0.6分别连接。下载器连接开发板和计算机,用来编译和调试程序。
2.2 程序设计
IAR 8.10是一款用于TI单片机的编程软件,采用IAR 8.10编写程序,程序流程如图3所示。整个程序包括主程序、测距程序以及串口通信程序。
2.3 实验验证
程序设计完成后,用下载器进行下载和调试,并使用USB转串口线连接底板与计算机,打开串口调试助手,选择正确的串口(COM3)和波特率(9 600),得到如图4所示的测距结果。
为验证车位检测的测距效果,将连有超声波测距模块的开发板固定在天花板上并更换不同高度的待测物,在HC?SR04超声波测距模块的测量范围(2~400 cm)内进行了多次测距实验,并与手工测量进行对比,得到测距误差,如表2所示。
由表2数据可知,随着距离的增加,误差及相对误差都有所增大,其误差主要来源于以下方面:
1) 环境因素的影响,包括温度、压力、湿度和密度[13],其中,最主要的影响因素是温度;
2) 发射与接收时间差,粉尘等物质导致实际测量时未必是第一个回波的过零触发,使时间略微变大;
3) 超声波波束与探测目标之间的夹角不等于90°,导致测量结果大于实际距离。考虑到相对误差低于3%,且距离阈值设置合理时,测距的误差不会导致车位状态发生变化,因此可以认为该车位检测是可靠的。
3 基于ZigBee的無线数据传输
3.1 硬件选择
为实现多车位的检测,在硬件资源的限制下设计了可检测两个车位的系统。在2.1节车位检测硬件部分的基础上新增了CC2530F256开发板和天线,把天线安装在开发板的接口上,最后本实验所用到的硬件如图5所示,其中,两块开发板作为终端设备使用,另一块开发板作为协调器使用。
3.2 物理地址读写
一个CC2530F256单片机具有两种64位的物理地址,分别为Primary IEEEE address和Secondary IEEE address,前者由制造商定义,只读且无法写入,后者可在SmartRF Flash Programmer软件中进行读写。默认的Secondary IEEE address是FF FF FF FF FF FF FF FF,为将协调器和两个终端设备进行区分,需要对其进行重写。读写后的三个设备的Primary IEEEE address和Secondary IEEE address如表3所示。
3.3 基于Zstack协议栈的程序设计
Zstack协议找是TI公司为ZigBee提供的一个解决方案,选用的版本为ZStack?CC2530?2.5.1a,在Zstack协议栈的APP层中的SampleApp.c文件内对程序进行修改以实现数据传输功能,程序流程如图6所示。
3.4 数据传输验证
在程序设计中定义了1#终端设备向协调器发送的数据格式为“1:xxxcm”,2#终端设备向协调器发送的数据格式为“2:xxxcm”。其中,xxx表示所测得的距离;终端设备向串口发送的数据格式为“Axxx#”和“Bxxx#”,A表示1#终端设备,B表示2#终端设备。
将协调器与计算机连接,协调器上的LED1与LED2常亮,CSN闪烁,随后三个灯暗,而LED1则闪烁三次,表明成功建立网络;给两个终端设备通电,会请求加入网络,终端设备上的LED1闪烁三次,则表示成功加入网络,在计算机端打开串口调试助手,选择COM3,打开串口,车位数据便会显示在窗口上,如图7所示。
4 上位机软件设计
4.1 界面设计
在visual studio 2010中选择创建Windows窗体应用程序,插入Label,TextBox,GroupBox,ComboBox,Button,Timer,PictureBox控件,并修改各控件的名称、大小等属性,完成后的上位机界面效果如图8所示。
在图8中,上位机界面分成了四个部分。左侧,是停车场的界面图,车位状态将呈现在本区域中,由于硬件中只有两个终端设备,故只能检测两个车位(P1,P2)的停车情况,因此,将P3~P10标记为“建设中”,更多的终端设备将在后续工作中连入;中间显示当前时刻,可选择串口名称和波特率,打开或者关闭串口;右侧可对距离阈值进行修改,显示两个停车位的测距结果以及各车位对应的停车时长和停车费用;最后,在界面的底部位置统计出车位总数和剩余车位数量。
4.2 程序设计
在代码页中对相应的控件进行程序设计,程序的设计思路是以串口的打开和关闭作为开始和结束,之间包括数据的接收和处理以及界面的显示,如图9所示。
4.3 功能验证
在完成上位机软件设计后,对其功能效果进行验证,本文的停车车位模块和软件中存在两个车位,故分成四种状态:
① 两个车位都空;
② 1#车位空、2#车位被占用;
③ 1#车位被占用、2#车位空;
④ 两个车位都被占用。
选择相应的串口名称和波特率,在本文中选择的“串口”是COM3,选择的“波特率”是9 600。打开串口,两个车位的实际测距结果在对应文本框中显示,用户可根据停车场实际情况及需求在“设置距离”文本框中输入数值。点击两个“设置”按钮,车位状态将会显示(红色即被占用/绿色即空),同时统计出剩余车位的数量。若车位状态为红色,表示有车停入,在“停车时长”文本框中开始计时(为方便测试,以秒为单位),同时“停车费用”文本框中的数值也随之增长(计费方式为5元/h,不满一小时记作一小时);若车位状态变为绿色,表示有车离开,此时计时停止,显示最终停车费用;若车位状态再次变为红色,则从0开始计时计费,以此类推。图10是状态①对应的上位机界面图,表4是对应四种状态下,上位机和下位机上显示的内容。
5 结 语
本文开发了基于超声波与ZigBee的车位检测系统,具体工作包括:
1) 采用CC2530F256开发板以及HC?SR04超声波测距模块等硬件,设计和开发了一种基于超声波的车位检测模块,使用IAR 8.10进行程序编写,并通过串口调试助手软件进行车位检测实验验证,证明该模块用于停车场的车位检测是可行的。
2) 选用ZigBee技术进行车位信息的传输,基于Zstack?2.5.1a协议栈,在APP层中对代码进行修改以满足实际需求,展示数据包的捕获过程,最后使用串口调试助手验证数据传输的效果。
3) 使用Visual Studio 2010软件,基于C#语言设计上位机软件,该软件可以模拟出停车场的界面并且可以实时更新车位状态的信息,此外,还可以显示当前时刻、测距结果、停车时长和停车费用、车位总数以及剩余车位数量,距离阈值具有可修改性以满足特定状况的需要。
最后,将上述三部分工作结合进行功能验证,表示系统运行是可行的。在未来进一步的研究工作中将连入更多的终端设备并结合具体的停车场景进行。
注:本文通讯作者为姚锡凡。
参考文献
[1] 王斯琪.基于Zigbee的超声波车位检测诱导系统设计[D].石家庄:石家庄铁道大学,2015.
[2] 王劲枫.基于ZigBee无线网络的停车诱导系统研究[D].贵阳:贵州师范大学,2018.
[3] 耿寸召.基于ZigBee技术的停车场车位检测系统设计[D].呼和浩特:内蒙古大学,2013.
[4] 高全勇.基于地磁的车辆探测系统研制[D].北京:中国科学院大学,2017.
[5] 程义民.大型停车库车位检测及信息系统设计[D].呼和浩特:内蒙古大学,2014.
[6] 陈春龙.智能高清车位检测仪的设计及在停车场管理系统中的应用[D].秦皇岛:燕山大学,2017.
[7] ZHU Hongmei, YU Fengqi. A vehicle parking detection method based on correlation of magnetic signals [EB/OL]. (2015?04?14) [2015?07?08]. https://doi.org/10.1155/2015/361242.
[8] 张贝贝,周祖荣.基于ZigBee技术的智能水浸系统设计[J].计算机工程与设计,2016,37(11):3130?3135.
[9] 岳学军,刘永鑫,王叶夫,等.基于ZigBee与地磁传感技术的停车诱导系统[J].计算机应用,2014,34(3):884?887.
[10] 毕烨,陈峤鹰.基于计算机的停车场监控系统研究[J].现代电子技术,2016,39(10):84?87.
[11] 朱齐媛,林俊杰,陈新原.基于物联网的停车泊位诱导系统的设计[J].科技视界,2018(10):11?13.
[12] 蔡亮.车位信息采集系统设计[J].电子技术与软件工程,2015(9):272.
[13] 胡延苏,高昂.超声波测距误差分析及校正研究[J].计算机测量与控制,2015,23(8):2820?2823.
