增程式电动汽车再生制动控制策略仿真研究
2020-06-08刘光隆蔡永明常健李德才李文亮
刘光隆 蔡永明 常健 李德才 李文亮


摘 要:基于AVL Cruise软件平台,建立了增程式电动汽车的仿真模型和再生制动控制策略的控制模块。对不同的控制策略进行了仿真对比分析,结果表明本文制定的控制策略可以较好的兼顾能量回收利用率和安全性,对实际工程设计具有一定的参考价值。
关键词:增程式;电动汽车;再生制动;控制策略
中图分类号:U469.72 文献标识码:A 文章编号:1005-2550(2020)03-0022-05
Abstract: Based on the AVL cruise software platform, the simulation model and the control module of regenerative braking control strategy of range-extender electric vehicle are established. Different control strategies are simulated and analyzed. The results show that the control strategy proposed in this paper can give a good consideration to energy recovery and safety, it has certain reference value to the actual engineering design.
1 前言
制动能量再生回收是电动汽车最重要的特点之一。在车辆制动时,动力传动系统中的电机将汽车的制动能量转换成电能,存储在能量存储单元中,从而显著提高汽车的能量利用效率,降低车辆实际能耗。
本文基于AVL Cruise软件平台对一款增程式电动汽车进行整车建模,结合增程式电动汽车的动力系统特点,在满足ECE制动法规要求的前提下,制定了一种再生制动能量回收控制策略,同时对控制策略进行了仿真对比分析。
2 制动能量回收控制原则
在电动汽车中,车辆总制动力由机械摩擦制动力和电机再生制动力组成,而电机再生制动力只能作用在车辆驱动轮上。再生制动控制的目的就是解决前后制动力的分配和驱动轮上电机再生制动力与机械制动力的分配问题。再生制动控制策略的制定将直接影响车辆制动能量回收效果和制动时的车辆安全性。针对这种混合制动系统,再生制动控制策略的设计既要保证汽车的安全性又要尽可能多的回收制动能量。但是这两个设计目标存在一定的矛盾性,所以再生制动控制策略的设计就是在这两个目标之间找到一个合适的平衡点。增程式电动汽车的结构如图1所示:
基于制动安全考虑,ECE法规对前后轮制动力分配有严格规定,在总制动力需求一定的情况下,只能在法规规定的范围内进行前后轮制动力的分配。基于能量回收最大化的原则,在法规允许范围内尽可能多的把制动力分配给驱动轮;在电机发电和电池充电功率的允许范围内尽可能多的把驱动轮的制动力分配给电机再生制动。
3 制动能量回收控制策略
3.1 制动模式划分
基于制动强度,通常把制动划分为如下三种模式:
轻度制动:汽车在缓慢停车或者长下坡时,对制动力的要求不是很大,驾驶员只需轻踩制动踏板即可满足要求,该工况为轻度制动工况,本文定义制动强度z<0.2时为轻度制动。由于在轻度制动时,法规对制动力分配系数没有严格的限制,所以当车辆在轻度制动时,制动力可以完全由驱动轮提供。通过查阅文献,国内一般小轿车的制动强度门限值一般限制在0.15左右,所以为了能够更多的回收制动能量,当车辆制动强度z<0.15時,整车制动力完全由驱动轮的再生制动提供。
正常制动:一般汽车在城市道路行驶遇到红灯或行人需要减速或停车的工况,需要提供一个相对较大的制动力,该工况为正常制动工况,本文定义0.2≤z≤0.7为正常制动。该工况又分停车过程和减速过程,其中停车过程制动力完全由机械摩擦制动提供,减速过程以再生制动为主机械摩擦制动为辅。
紧急制动:当汽车行驶过程中遇到紧急情况,需要迅速减速或停车时,驾驶员通常会深踩制动踏板,该工况为紧急制动,本文定义z>0.7为紧急制动。在该工况下,由于制动时间短,强度大,从安全方面考虑,采用完全机械制动完成。
3.2 制动能量回收约束条件
在制定制动能量回收控制策略时,为了兼顾效率、安全、舒适和相关零部件的使用寿命,需要同时考虑一些约束条件。
动力电池的SOC状态:为了防止过充,当电池组SOC值达到设计允许的上限值时,为保护电池,延长电池的使用寿命,不进入再生制动。
动力电池的充电功率限制:为了保证电池安全,延长电池使用寿命,制动回收的功率不能超过电池的最大充电功率。
车速:当车速较低时,电机制动电动势较小,能量难以回收,同时考虑制动安全性,不进入再生制动。
制动强度:当制动强度过大是,为了保证制动安全性,同时防止电机、电池瞬间充电功率过大,不进入再生制动。
电池温度:当电池温度达到设计的上限值时,不进入再生制动。
3.3 再生制动控制策略
车辆运行在增程模式时,增程器按相应的控制策略输出功率,此时如果车辆进入再生制动模式,增程器和驱动电机将同时给电池充电,如果电机制动回收的功率很大时可能会导致充电功率过大,超过电池充电功率,所以在该工况下当制动回收的功率超过一定限制值时,增程器的发动机应转入怠速工况,这样既可以保护电池过充,又可以防止发动机频繁启停。
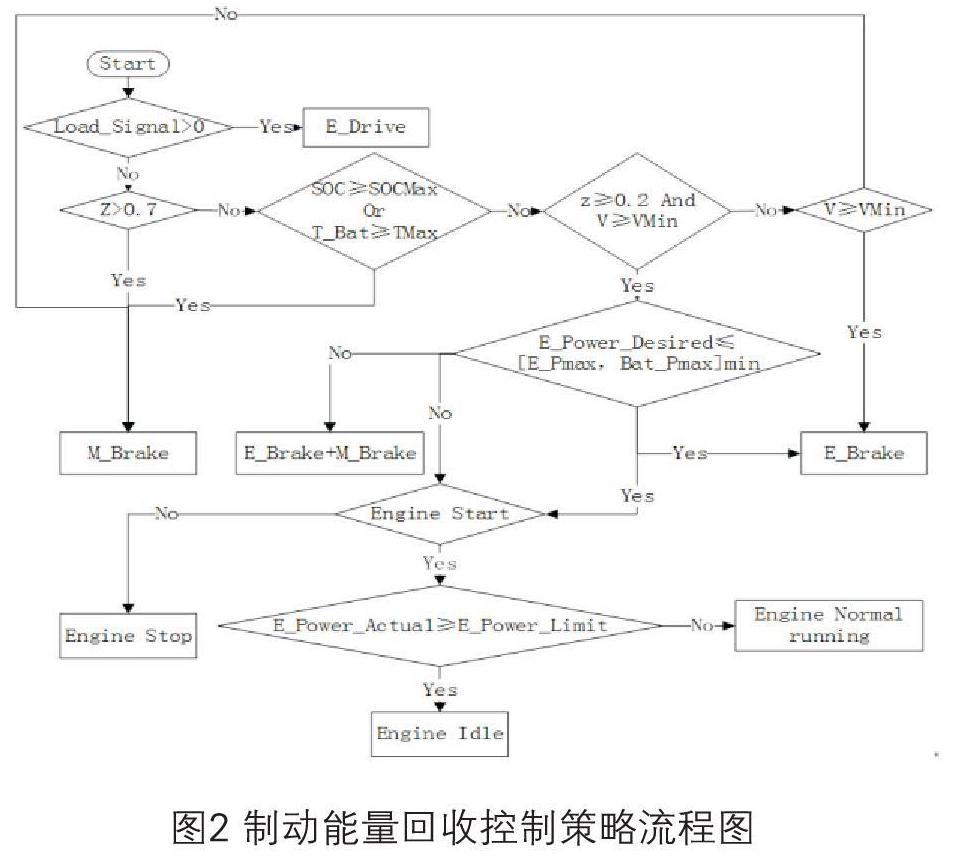
基于前文的制动模式划分、制动能量回收的约束条件和增程模式下对相关硬件的保护,制定了本文的再生制动控制策略。
当制动强度Z>0.7时,车辆制动力完全由机械制动提供。
当电池电量SOC≥SOCMax或电池温度T_Bat≥TMax时,车辆制动力完全由机械制动提供。
当车速V≤VMin时,车辆制动力完全由机械制动提供。
当制动强度0.2≤z<0.7和 V≥Vmin时;如果制动回收功率低于最大回收功率限制,车辆分配给驱动轮的制动力完全由再生制动提供;如果制动回收功率高于最大回收功率限制,车辆分配给驱动轮的制动力将由机械制动和再生制动共同提供。
当发动机工作,车辆再生制动大于设定限值时,发动机转入怠速工况。
如图2所示为制动能量回收控制策略流程图。
4 制动能量回收策略仿真分析
本文采用AVL Cruise对制动能量回收策略进行仿真分析,其中整车仿真模型在AVL Cruise软件中搭建;制动能量回收控制模块根据制定的控制策略自主搭建,通过生成的DLL文件与AVL Cruise模型形成无缝连接。
4.1 仿真模型
本文仿真模型搭建的关键在AVL Cruise的整车仿真模型与制动能量回收控制策略模块之间的信号交互,这是模型搭建的重点。整车仿真模型如图3所示:
在自主搭建制动能量回收控制器模块时,为了最大限度的模拟实车状态,仿真控制策略应基于实车控制策略及相关信号进行搭建。基于前文制定的能量回收控制策略,制动能量回收的控制模型如图4所示:
4.2 仿真結果与分析
基于前文建立的仿真和控制模型,进行了如下三个方面的仿真分析。
在制动强度小于0.15的轻度制动情况下,不同的前后轮制动力分配方案对制动能量回收的影响。
当车辆工作在增程模式下时,车辆进入制动能量回收模式,此时发动机维持原工作状态和转回怠速状态,对动力电池的影响。
当车速较低时,对制动能量回收的影响。
图5是车辆以60Km/h速度匀速下坡时不同坡度与制动强度的关系曲线,从数据可以看出,坡度越大制动强度越大,当坡度达到10%时制动强度为0.07。由以上数据可以判断当车辆在下坡工况正常行驶时,制动强度基本不会超过0.15。
图6、图7是车辆以60Km/h速度匀速下坡时制动力按例分配给前后轮和制动力100%由驱动轮提供两种不同的制动力分配下,不同坡度的电机发电效率对比和电池充电功率对比;其中分配给驱动轮的制动力完全来自于电机再生制动。从数据对比可以看出当车辆制动力100%由驱动轮再生制动提供时,电机的发电效率和电池的充电功率都远远高于制动力按比例进行前后轮分配的策略。
由以上分析可以得出当制动强度小于0.15时,整车制动力完全由驱动轮的再生制动提供,这将大大提高制动能量的回收利用率。
如图8所示为车辆增程模式下车速为60Km/h时进行制动能量回收,不同的发动机工作工况制动强度与充电功率关系对比。如果发动机工况点维持不变,则车辆制动能量回收时增程器和回收制动两部分充电功率的叠加有可能会导致充电功率过高的情况,如图所示,当制动强度为0.45时,充电功率达到了90Kw以上,但如果让发动机转入怠速工况只维持增程器的运行状态而不再给电池充电,则充电功率会低很多。
所以在增程模式下当制动回收功率超过某一限值时,应控制发动机转入怠速工况。这样既可以防止由于两方面充电功率的叠加可能导致的电池过充,同时也可以避免发动机的频繁启停。
图9为在制动强度z=0.4时电机发电效率与车速的关系曲线。在同样的制动强度下,随着车速的降低,电机的发电效率逐渐减小,而且车速越低效率下降的速率越快,当车速低于一定值时,制动能量的回收率是非常低的。
图10为车速为10Km/h时电池充电功率与制动强度关系曲线。当制动强度z=0.5时,充电功率也只有不到6Kw,而且随着制动强度降低,该值越小。
结合图9、图10分析,当车速很低时,驱动电机的发电效率和电池的充电功率都非常低,能量难以回收,同时考虑低速停车制动的安全性,当车速低于某一限值时,车辆制动力完全由机械摩擦制动提供。
5 结束语
电动汽车制动能量的回收策略直接决定了制动能量的回收率和车辆的制动安全性,本文利用AVL Cruise软件平台搭建了仿真模型和再生制动控制模型,对不同的回收策略进行了仿真对比分析,结果表明该策略可以较好的兼顾能量回收利用率和制动安全性,具有一定的可行性。同时利用本文仿真分析方法可以对实车制动能量回收控制策略制定提供参考和方向,具有一定的实际应用价值。
参考文献:
[1]周倪青,陶小雨,杜金枝. 制动能量回收策略研究[J]. 科技创业月刊,2016(6): 109-111.
[2]陈泳丹,席军强,陈慧岩. 单轴并联式混合动力城市客车再生制动档位决策[J]. 北京理工大学学报,2012(4): 370-376.
[3]张方强. 增程式电动汽车动力系统参数匹配与仿真研究[D]. 浙江大学,2017.
[4]翟志强,赵国柱,朱思洪. 电动汽车再生制动控制策略研究[J]. 计算机仿真,2013(11): 160-163.
[5]冯能莲,么居标,俞黎明等. 电动汽车再生制动控制策略 [J]. 北京工业大学学报,2008(12): 1332-1338.
