基于事故数据行人AEB系统传感器参数优化
2020-06-02邱圆超朱宜灿
邱圆超, 朱宜灿
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
随着当今世界科技水平不断进步,汽车行业也逐渐朝着电动化、智能化、网联化方向发展,但安全同样是不容忽视的问题.我国道路交通情况复杂,人车混行现象较多,行人作为道路使用者中的弱势群体,整体伤亡量非常大[1].先进驾驶辅助系统(Advanced Driving Assistance System,ADAS)作为自动驾驶的重要组成部分,能够帮助驾驶员避免或减轻事故危害.德国联邦交通研究所(BASt)研究表明,70%严重交通事故都可以通过ADAS避免[2].自动紧急制动(Autonomous Emergency Braking,AEB)系统是ADAS系统中备受关注的一种,对提高车辆安全有很大作用.
AEB系统利用各类传感器实时监测车辆前方环境,并根据算法预判当前环境危险程度,当检测到前方有潜在碰撞危险时,系统向驾驶员发出警告以提醒驾驶员采取措施规避危险,并在驾驶员没有及时对警告信号做出反应或采取的制动力不足且碰撞危险变得十分紧急时,系统提供制动力,通过自动制动主动介入方式来避免碰撞事故发生或减轻碰撞事故严重程度[3-5].近年来,欧美日等地区在行人保护方面愈加重视,如欧盟汽车标准法规体系第127条(ECE R127)《机动车辆关于行人安全性能的统一规定》已作为欧盟强制法规,行人保护相关测试规程也逐渐成为安全星级评价的一部分.在国内,行人保护技术相对落后,以中国特色交通数据为依托,加强这方面技术研发迫在眉睫.2014年,欧洲新车评价规程Euro-NCAP正式将AEB系统纳入新车评价规程[6],同时在2016年将行人AEB系统作为弱势道路使用者(VRU)保护的一部分;中国新车评价规程(C-NCAP)[7]从2018年开始也将AEB纳入评分体系中,其中包括行人自动紧急制动系统测试.
目前国内外学者对AEB系统的研究也越来越多,Anderson等[8]通过对AEB系统传感器参数、系统延迟、制动减速度等进行分析,得出系统参数变化对其效用的影响;Huang等[9]分析瑞典人车事故相对位置特征以及AEB系统识别精度的影响因素等,并通过一系列试验得到识别系统参数最优值;同济大学李霖等[10-12]根据行车记录仪记录的实际道路状况,着重分析自动紧急制动系统测试场景,并在PreScan软件中进行仿真试验;广汽研究院刘建平等[13]通过对不同车型AEB系统性能实测数据的分析,得到AEB系统即碰时间(TTC)值设置在0.5~1.2 s更为合理;Chen等[14]基于事故数据分析3种中国典型行人危险场景,研究发现AEB系统可以减少20%行人碰撞事故.
本研究通过PC-Crash进行52个车辆与行人碰撞事故案例重建,基于目前主流传感器参数,通过标准测试场景确定最优组合,并采用PreScan软件搭建52个真实事故测试场景,验证所选参数有效性,为建立适用于我国真实道路交通情况的行人AEB系统提供参考.
1 事故案例筛选与分析
1.1 事故来源
本文所选真实交通事故数据来源于国家车辆事故深度调查体系(National Automobile Accident In-depth Investigation System,NAIS)上海松江站点近5年来所采集的事故案例,每个事故案例经过事故现场采集、事故分析、PC-Crash事故重建、视频分析等方式进行过程还原,最终提炼出包含2 200余项参数变量的深度事故数据.本文根据AEB适用条件,从事故重建准确性角度出发,制定以下原则来筛选数据.
1) 事故参与方行人仅涉及1人,同时也不包括碰撞推行二轮车人员或二次碰撞等案例;
2) 事故参与方车辆车型为轿车、SUV或MPV,且为单一车辆参与,不包括两车或多车连续碰撞;
3) 碰撞事故带有事发视频或汽车事故数据记录器(Event Data Recorder,EDR)数据.
1.2 事故案例分析
按照筛选原则,从松江案例库共筛选出52个样本.通过采集到的车辆损坏、行人伤害、事故环境等信息,运用PC-Crash软件进行事故重建,并通过事故现场视频或者EDR数据进行事故信息校准,最终得到碰撞全过程,部分车辆与行人碰撞事故案例见表1.

表1 部分车辆与行人碰撞事故案例Table 1 Some cases of collision accident between vehicle and pedestrian
通过分析52个事故案例,得到碰撞车速一般分布在40~60 km/h,约占样本案例38.6%,车辆与行人发生碰撞时平均碰撞速度为54.1 km/h,行人平均速度为5.8 km/h,如图1和图2所示,可作为仿真分析时车辆与行人速度选取依据.

图1 车辆碰撞速度Fig.1 Collision speed of vehicle
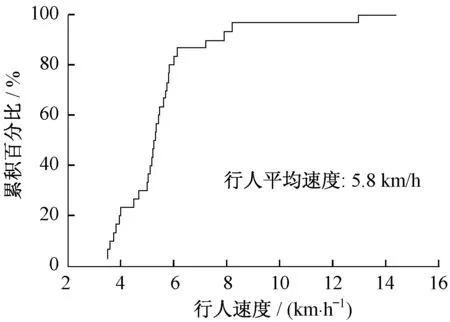
图2 行人运动速度Fig.2 Movement speed of pedestrian
2 传感器关键参数优化
2.1 优化参数确定
行人AEB系统大多数使用雷达和摄像头进行传感器融合,基于探测模块对前方障碍物进行识别,持续判断危险程度,并通过自动制动以避免或减轻事故伤害.传统AEB避撞大多采用单级制动策略,往往会比驾驶员正常避撞操作更突然,影响驾乘体验.本文以驾驶员舒适性分级制动策略为基础,进行传感器关键参数优化.
行人AEB系统传感器参数主要涉及雷达水平探测角度θ、摄像机电荷耦合器件(CCD)尺寸和雷达探测距离等,而雷达探测距离与水平探测角度存在一定相关性.雷达水平探测角度决定行人被探测到的概率,且随着探测角度增加,事故中行人被探测到的概率均增加[15],从而降低碰撞速度或避免发生碰撞,而摄像机CCD尺寸与视场角相关,因此正确选择CCD尺寸可以使系统得到最优化设计.
本文选择θ、CCD尺寸作为参数优化对象,并从系统安全性角度出发,以无碰撞时停止距离和碰撞速度最优解为最终指标,即无碰撞时与目标行人距离越远,有碰撞时与目标行人碰撞速度越小,系统效果越好.将不同传感器参数分别设置为标准测试场景进行PreScan虚拟测试,得出该场景下试验指标.目前市面上主流传感器设定值见表2.
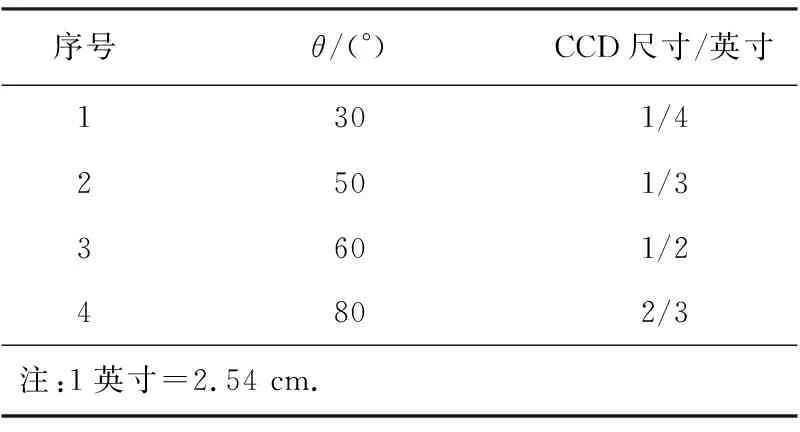
表2 传感器设置Table 2 Sensor setting
2.2 不同场景最优参数组合确定
为确定雷达和摄像机参数最优组合,本文选择Euro-NCAP[6]中4种标准测试场景进行测试,如图3所示.首先进行每一个场景最优参数搭配,并在PreScan软件中进行仿真分析,雷达和摄像机参数设置如图4和图5所示,然后再进行各场景最终搭配与仿真分析.

图3 Euro-NCAP标准测试场景Fig.3 Standard test scenarios of Euro-NCAP
本文依据事故案例得出的碰撞速度选择仿真测试中车辆与行人速度,行人速度设为5 km/h不变,选 取车速为40和60 km/h进行测试,分别将雷达与摄像机不同参数设置进行搭配,每一种搭配进行一次仿真测试,由于测试次数较多,仅展示图3(a)中场景1测试结果,测试结果见表3.

图4 雷达参数设置Fig.4 Parameters setting of radar

图5 摄像机参数设置Fig.5 Parameters setting of camera
由表3可以得到,对场景1不同试验工况进行不同参数组合测试,θ为80°、CCD为1/2英寸,车速为40 km/h时,完全避免碰撞,且与目标行人距离最远;车速为60 km/h时,没有避免碰撞,但其碰撞速度远低于其他参数组合;分别用同样方式应用到各个场景,最终得到各个场景最优组合,见表4.
2.3 最优参数组合确定
仿真测试结果表明,Euro-NCAP中每一个场景最优传感器参数组合基本都存在差异,以此为基础,把得到的各个场景传感器最优参数组合分别应用到其他场景中,以最终确定适用于4个场景的最优组合,测试方案及结果见表5.
由表中数据可以得到如下结论:
1) 对于车辆行驶速度在40 km/h以下的试验工况,碰撞均能够避免;
2) 车辆行驶速度为60 km/h时,碰撞均无法避免,但是碰撞速度大幅降低;
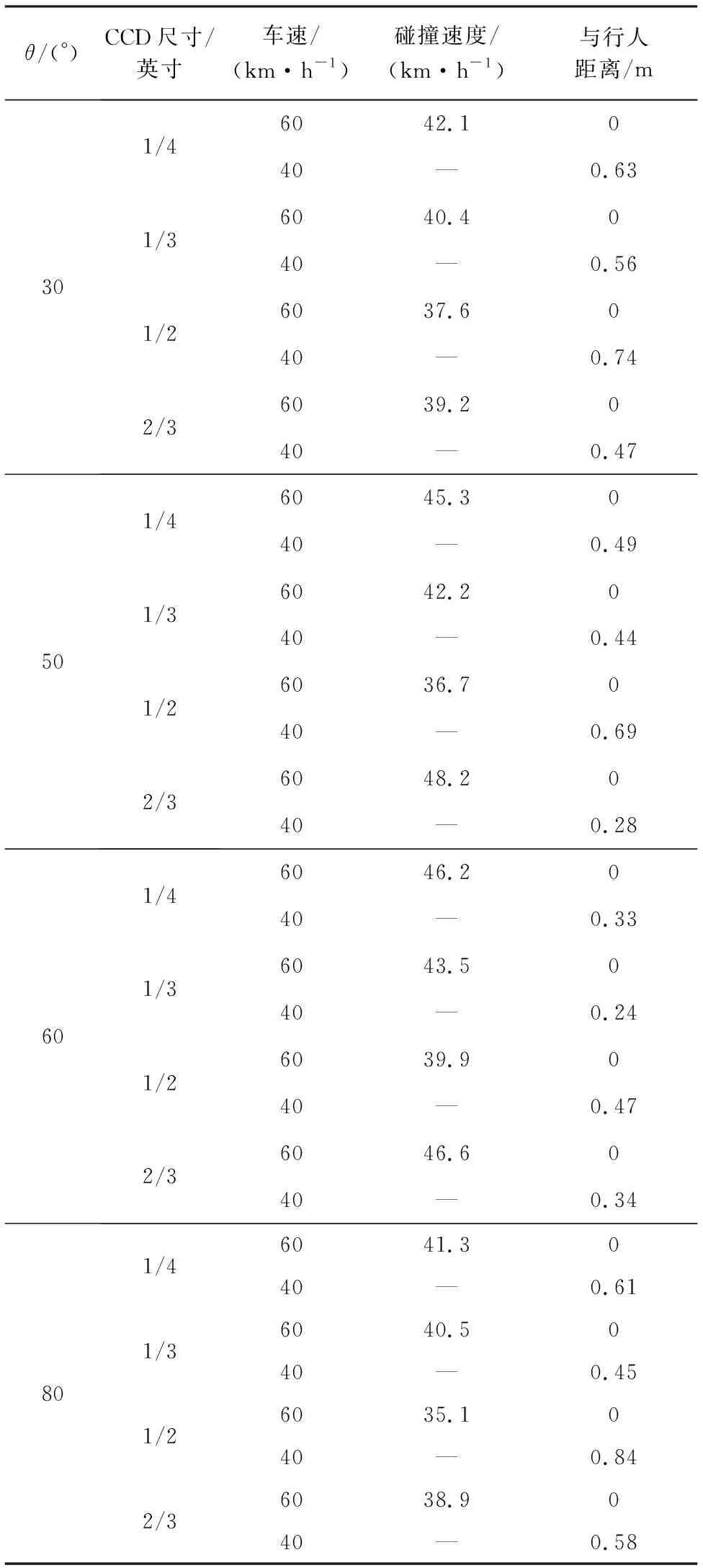
表3 仿真测试结果Table 3 Simulation test results

表4 不同测试场景下传感器最优参数组合Table 4 Sensor optimal parameters combination under different test scenarios

表5 测试方案及结果Table 5 Test plan and results
3) 将试验中无碰撞时与目标行人的距离以及碰撞时的碰撞速度求和,得到当θ为80 °、CCD为1/2英寸时,4个场景下无碰撞时与目标距离求和最大为2.94 m,大于其他两种组合的2.46 m与2.06 m,碰撞时速度求和最小为147.1 km/h,小于其他两种组合的151.7 km/h与150.7 km/h.
结合PreScan仿真数据与分析结果,最终得到可以适用于4种场景传感器最优参数组合,θ为80°,摄像机CCD为1/2尺寸.
3 参数优化后仿真分析
为验证参数优化后行人AEB系统效果,以及对我国实际道路交通情况的适用性,将优化前后行人AEB系统应用到52个人车事故样本案例中,并进行PC-Crash事故重建,如图6和图7所示,然后在PreScan软件中搭建52个测试场景,并进行虚拟测试仿真,部分测试场景如图8所示.
将52个事故案例进行参数优化后的仿真分析,并记录每一个事故案例的碰撞速度,最终根据事故前车辆速度进行统计分析,仿真结果见表6.

图6 真实环境事故示意图Fig.6 Schematic diagram of real environmental accident
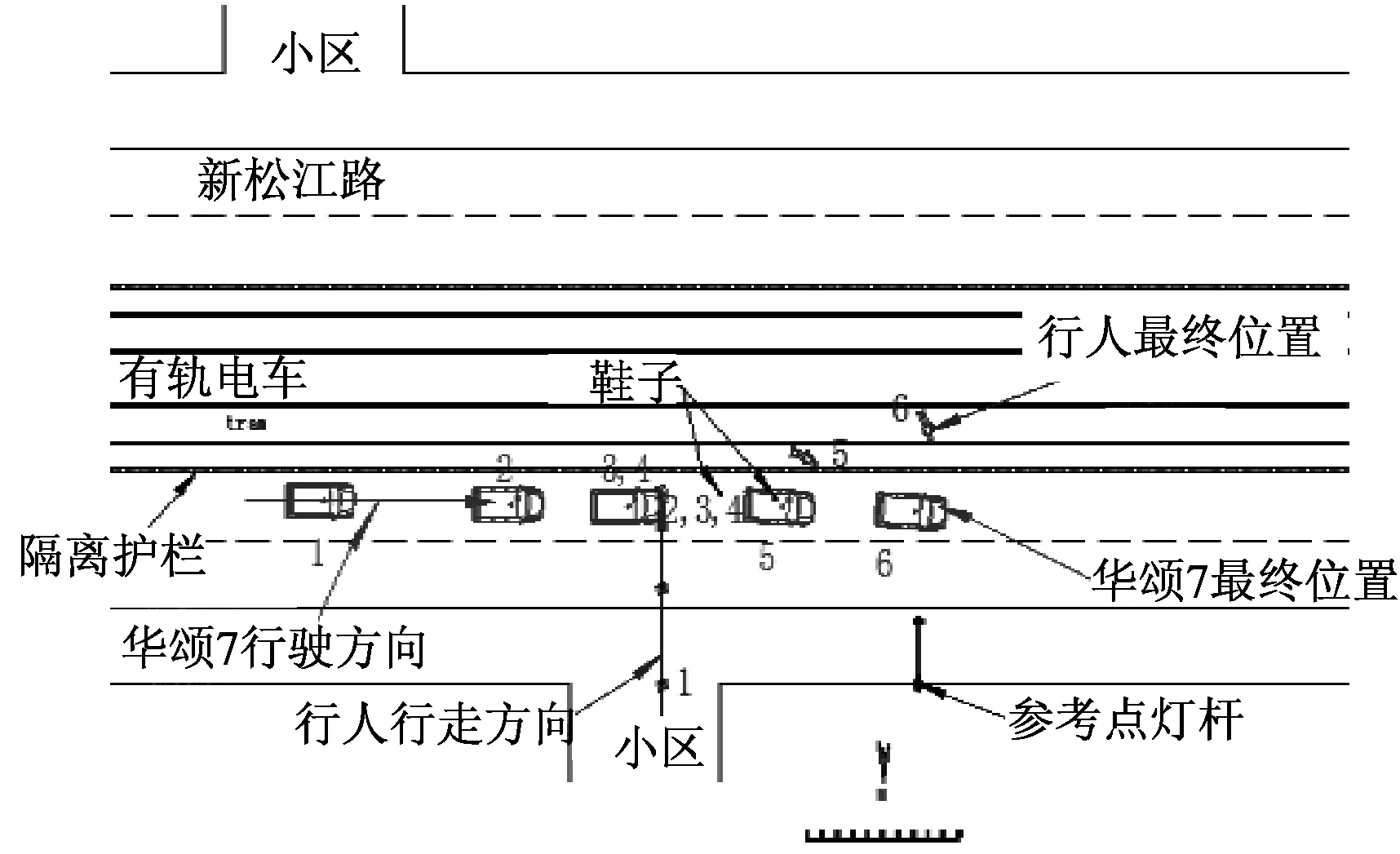
图7 事故过程CAD图Fig.7 CAD drawing of accident process

表6 优化后仿真结果Table 6 Simulation results after optimization
仿真测试结果表明,有一半事故能够完全避免.当车速小于40 km/h时,碰撞能够避免,当车速在40~60 km/h行驶时,有 18例事故不会发生碰撞,其余12例事故案例碰撞车速都小于40 km/h;当车辆行驶速度大于60 km/h 时,有2例事故碰撞速度小于40 km/h,其余均大于40 km/h,测试结果表明优化后的AEB系统达到避免或减缓碰撞的效果.
4 结 语
本文对行人AEB系统传感器参数设置进行研究,通过Euro-NCAP标准测试场景得到传感器最 优参数组合,即雷达水平探测角为80°,摄像机CCD为1/2英寸.通过PreScan软件将参数优化后AEB系统应用于52个真实事故案例中,验证最优参数组合具有可行性.此外,参数优化后AEB系统虽已达到避免或减缓碰撞的效果,但在车辆高速行驶时的表现却不尽如人意,车辆高速避撞将成为下一步的研究重点.
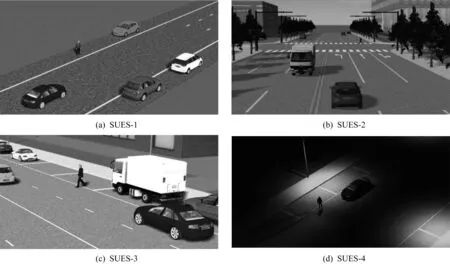
图8 部分PreScan测试场景Fig.8 Some test scenarios in PreScan
