液压挖掘机液压控制系统原理及压力补偿阀数学模型概述
2020-05-25杨婷婷张璇
杨婷婷 张璇


摘 要 在对液压挖掘机液压控制系统的组成和工作原理认真分析的基础上,建立具有普适性的系统关键零部件的系统动力学模型、传递函数方块图模型,为今后建立整个液压控制系统的数学模型提供依据,也是模型理论分析和仿真验证的基础。
关键词 液压控制系统;动力学模型;方块图模型
引言
本文基于某中型液压挖掘机负荷传感液压系统,在分析了液压系统的组成与工作原理的基础上,通过建立液压系统中关键部件可变压力补偿阀的受力平衡方程,进而建立其液压系统动力学模型,最终建立液压挖掘机负荷传感液压系统可变压力补偿阀的方块图模型,为今后建立整个液压控制系统的数学模型打下基础,同时为模型的理论分析和仿真研究提供依据。
1 系统组成与工作原理
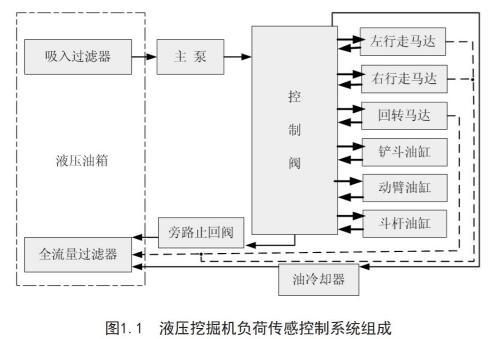
液压挖掘机负荷传感控制系统主要由主泵、控制阀(多路阀)、執行机构和液压管道四部分组成,主要功能是从主油泵供应高压油,推动油缸和液压马达进行挖掘、行走和回转。液压挖掘机负荷传感控制系统组成如图2.1所示。
主泵主要由两个弯轴型变量柱塞泵组成,为整个系统提供高压油,如图1.1所示。控制阀为KVMX?—25型多路阀,主要由回转控制阀、左右行走控制阀、铲斗控制阀、动臂控制阀、斗杆控制阀、可变压力补偿阀、节流阀、补偿安全阀、梭阀和辅助阀组成,主要功能是控制整个液压回路中液压油的油压、流量和流向,每个主控制阀都带有可变压力补偿阀,当执行机构进行复合动作时,执行元件可以以一定速比运动而不互相干扰,保证复合动作的协调性。执行机构主要由工作机构、回转机构和行走机构组成,其中工作机构由铲斗油缸、动臂油缸和斗杆油缸组成,由液压缸来驱动;回转机构由回转马达组成;行走机构由左、右两个行走马达组成,回转机构、行走机构均由液压马达驱动,主要完成液压挖掘机挖掘、满斗举升、回转、卸载及行走等动作[1]。
图1.2为负荷传感控制系统工作原理图,该系统为负荷传感控制系统,从变量泵和主控阀进入执行元件的流量不受负载影响,在保证复合动作的同时,又使各执行元件互不干涉,同时,结合液压泵控制系统,减少了溢流损失。
负荷传感控制系统中,通过梭阀的作用,最高负载压力不但被传感到变量液压泵上,同时也被传感到各执行元件的可变压力补偿阀上,使位于变量泵与执行元件之间的控制阀节流孔压差始终保持相等(一般为规定值),这样就保证了各执行元件所获得的流量始终与节流孔面积成正比,使得所有执行元件以相同速比减速,从而保证各执行元件动作的协调性[2]。
2 建立数学模型
负荷传感系统控制阀为KVMX?—25型多路阀,主要由换向阀(主控制阀)、节流阀、可变压力补偿阀、梭阀网络组成。由于系统中斗杆控制阀、动臂控制阀、铲斗控制阀、回转控制阀和行走控制阀结构相同,数学建模过程相同,他们同各自的可变压力补偿阀及其辅助元件组成各自的控制回路,共同并联在液压网络上,因此,本节对斗杆控制阀组中的可变压力补偿阀进行分析[3]。
2.1 可变压力补偿阀数学模型
忽略可变压力补偿阀自身重力,压力补偿阀的阀芯受力平衡方程:
(2-1)
式中:——压力补偿阀阀芯下腔作用力,,
——压力补偿阀阀芯上腔作用力,,
——压力补偿阀阀芯稳态液动力,
,
——阀芯质量,
——流量系数
——速度系数
——压力补偿阀进油口压力,
——压力补偿阀出油口压力,
——压力补偿阀的阀芯受力面积,
——黏性阻尼系数,
设压力补偿阀工作在某稳定工作点,列出式(2-1)线性化方程,得:
(2-2)
其中:,
根据体积弹性模量公式[4]:
(2-3)
得出:
(2-4)
因此,压力补偿阀流量连续方程为:
(2-5)
压力补偿阀出口压力-流量方程为:
(2-6)
式中: ——面积梯度
——油液密度,
——多路阀的主控制阀流入可变压力补偿阀的流量,
——可变压力补偿阀阀芯腔容积,
由于压力补偿阀出口压力-流量方程为非线性方程,设压力补偿阀在某稳定状态时相应变量为(),式(2-6)的线性化方程为[5]:
(2-7)
式中:——流量增益,
——流量-压力系数,
对式(2-2)、(2-7)进行拉氏变换,得:
(2-8)
式中: ,
(2-9)
式中:为液动力刚度,
根据式(2-8)、(2-9),画出可变压力补偿阀的传递函数方块图,如图2.1所示:
以上以铲斗液压回路为例,建立了液压挖掘机负荷传感液压系统可变压力补偿阀的传递函数方块图模型,为今后建立整个液压挖掘机负荷传感液压系统数学模型的建立打下基础。
参考文献
[1]王慧,杨婷婷,王超,等.二次调节伺服加载试验台转矩控制系统的动态鲁棒补偿[J].机床与液压,2008,(10):92-94.
[2] 李洪人.液压控制系统[M].北京:国防工业出版社,1990:76.
[3] 沙道航.电液伺服系统鲁棒最优控制的研究[J].机床与液压,199, (5):16-18.
[4] 王占林.近代液压控制[M].北京:机械工业出版社,1997:107.
[5] 史忠科.鲁棒控制理论[M].北京:国防工业出版社,2003:51.
作者简介
杨婷婷(1985-),女,辽宁阜新人;毕业院校:辽宁工程技术大学,专业:机械,学历:研究生,硕士学位,现就职单位:阜新市转型升级(突破辽西北战略)服务中心,研究方向:机械工程、机电液一体化。
张璇(1983-),女,辽宁阜新人;毕业院校:辽宁工程技术大学,专业:工程,学历:研究生,硕士学位,现就职单位:阜新高新技术开业开发区。