一种基于物联网技术的太阳能逐日控制系统设计与实现
2020-05-21孙廨尧
孙廨尧


摘要:为了解决现有太阳能逐日系统控制方式单一问题,给出了一种基于Android移动端的太阳能逐日控制系统。系统运用传感器、无线传输等物联网技术,舵机组合作为运动平台,Cortex M3单片机实现智能控制单元,通过NB-IoT模块将信息发送至云平台,用户可通过手机查询并控制舵机的转动实现对太阳的追踪。
关键词:逐日系统;Android:NB-loT
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)09-0287-02
1 前言
隨着时间的推移,人类不得不寻找能源以满足社会发展。由此不可避免的带来了能源短缺问题,威胁着人类的可持续发展[1]。几年前,习总书记对能源“革命”进行了定调,其中,太阳能作为新能源建设的主要部分,已经越来越多的应用到国计民生的各个方面,新能源的引入及应用也越来越广泛。在世界各国对太阳能研究中,如何利用其发电成为热点[2]。但是太阳能电池板目前多数还都是固定的,虽然有单轴跟踪、双轴跟踪以及混合式跟踪等多种追踪方式以提高光转换率,但在控制方式上却比较单一。本文在混合式跟踪的前提下,提出了一种基于Android的太阳能逐日控制系统。相比较目前在控制室操作的复杂性,用户只需通过手机即可远程控制云台的转动,实现对太阳的追踪。操作简单,易使用。
2 系统方案设计
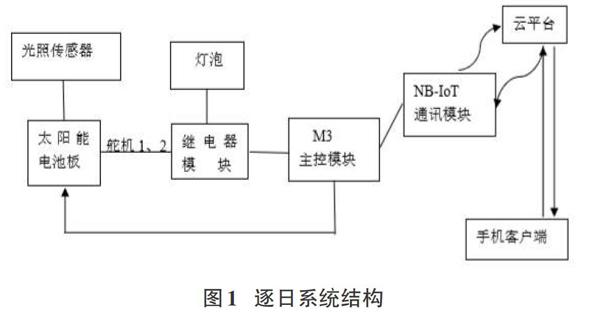
本系统是一套靠光敏传感器来感知最大强光照度位置,并将太阳能电池板定位到此最佳光照角度的手机移动控制系统。系统利用光敏电阻作为传感器,两个舵机组合作为运动平台,结合NB-IoT通讯将系统相关信息上传至云平台,M3单片机实现智能控制单元,灯泡模拟太阳光。在系统上电工作时,控制指令先让太阳能电池板全局扫描所有方向的光线强度,并定位到最大光照度位置。过程中先操作底部舵机2,再操作顶部舵机1;由于舵机本身性能原因,舵机2只能实现0-1800的角度扫描,舵机1由于云台的结构及安全的限制,人为设置好安全范围后,实现600以内的角度扫描。两个舵机都操作完成后,基本上定位了做大的光源角度点,后续系统就会以此定位点跟随光源的移动,机械臂跟随光源移动。手机端能够通过访问云平台获得光敏传感器的值及太阳能电池板的角度值,并能手动控制装置的开启与关闭、手动控制太阳能电池板的方向。系统结构如图1所示。
根据需求,手机端能够进行远程操作,包括:1)实时获取光强度信息及舵机1和舵机2的角度值,同时能够获取当前实验平台上灯泡的开关状态;2)手机端可以远程控制舵机l和舵机2的角度值;3)手机端可以远程控制灯的开与关状态。整个系统业务流程简单,输入用户名及密码后,后台服务器进行登录判断,如果登录失败,返回错误提示信息;登录成功即可进入系统主控制界面,此界面能够查看相关设备信息以及控制相关设备。系统流程图如图2所示。
4 主要功能展示
4.1 用户登录
用户在云平台注册信息后,通过注册的手机号进行登录,云平台会对当前账号进行校验,校验通过后,才允许进行查询,控制等操作。登录界面包括用户名和密码文本框,以及登录按钮。如图3所示。
4.2 系统主控制界面
软件界面主要包含以下几个部分:显示当前的光照值;控制灯的开启与关闭;舵机1和舵机2能够通过自定义滑动选择器进行舵机角度控制。系统软件控制效果和硬件连接图如图4和图5所示。
5 结论
本文给出了一种基于Android移动端的太阳能逐日控制系统。详细设计了硬件组成及软件实现。并结合NB-IoT通讯模块,实现了手机访问云平台信息并能在手机上调节控制云台转动以实现逐日。操作简单,开拓了应用渠道,为今后其他逐日系统的实现提供了参考价值与思路。
参考文献:
[1]陈本源,谢淼,钱超.追日型太阳能路灯系统设计[J].计算机与数字工程,2015,43(11):2081-2085.
[2]罗金玲,太阳能电池板自动追日系统[J].电脑编程技巧与维护,2015(22):31-32,37.
【通联编辑:李雅琪】
基金项目:安徽商贸职业技术学院科研项目“基于物联网技术的太阳能逐日系统应用研究”(2019KY203)
