风电机组偏航静态偏差对发电性能的影响及优化方法
2020-05-19杨伟新李肖刚
杨伟新, 宋 鹏, 陈 雷, 郭 鹏, 崔 阳, 李肖刚
(1.华北电力科学研究院有限责任公司 国网冀北电力有限公司电力科学研究院, 北京 100045; 2.风光储并网运行技术国家电网公司重点实验室, 北京 100045; 3.鲁能新能源(集团)有限公司 河北分公司, 河北 张家口075000; 4.华北电力大学 控制与计算机工程学院, 北京 102206; 5.中国铁道科学研究院集团有限公司 标准计量研究所, 北京 100081)
0 引言
偏航系统是实现风电机组快速精准有效对风的执行机构, 偏航控制系统性能直接决定着风电机组的安全性和经济性[1]。 目前,兆瓦级风电机组多采用主动偏航控制策略, 利用风向传感器和偏航电机进行主动偏航控制, 其中风向传感器位于下风向,其测量值受叶片尾流、传感器误差、安装等因素影响,使偏航控制系统产生偏航静态偏差。同时,偏航控制性能产生了偏航控制性能误差,使风向与机舱轴线产生偏航误差, 偏航误差会引起机组输出有功功率减小[2],导致风电机组发电性能的损失,且对机组的载荷特性产生不利影响。
目前,学者分别从动力学、控制技术、数据分析等方面对风电机组的偏航控制策略优化进行了研究[3]~[6],主要解决了偏航控制性能误差对偏航误差的影响, 但对偏航静态偏差优化方面的研究较少。 文献[7]提出了一种基于功率检测的爬山算法, 该方法通过优化控制策略消除了由机舱风向传感器、尾流等引起的偏航静态偏差,实现机组的有效对风,并应用仿真对算法的效果进行了验证。此方法对工程的实际应用意义有限, 如果控制参数设置不当,容易导致偏航系统频繁转动,造成偏航系统额外的机械磨损机组可靠性下降[8]。 对于在运的风电机组,由于受机组硬件、载荷设计等方面的影响,智能仿真算法难以适用。
本文对产生偏航静态偏差因素进行了分析,以机组发电性能为优化目标, 应用机舱式激光雷达测风仪, 提出了一种开展现场实测的风电机组偏航静态偏差优化方法, 解决由偏航静态偏差造成的对风精度不高的问题。 实现风电机组对风向的高效追踪, 提高机组发电效率的同时保证机组可靠性。
1 偏航误差产生的主要因素
MW 级风电机组主动偏航控制策略功能框图如图1 所示[9]。
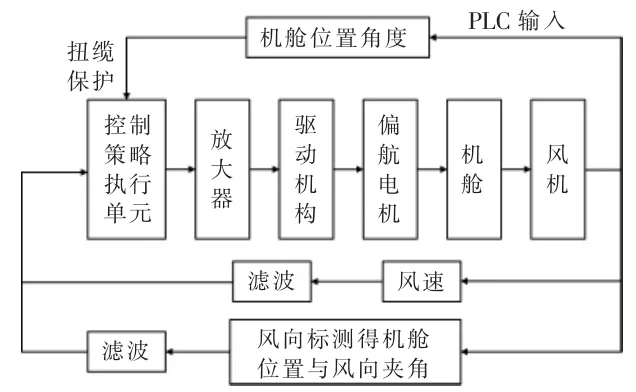
图1 偏航系统工作过程原理图Fig.1 The working process schematic of the yaw system
由图1 可知, 偏航系统依据风向标测量的角度进行偏航, 当风向标测量数据与来流风向不一致时,将产生偏航静态偏差,导致偏航控制性能变差,机组出现偏航误差。
随着风电设计水平和技术的日趋成熟, 偏航系统的控制误差对偏航误差的影响越来越小,而偏航静态偏差成为影响偏航误差的主要因素。
2 偏航静态偏差及影响分析
2.1 偏航静态偏差的定义
偏航误差主要受偏航控制性能误差和偏航静态偏差影响, 偏航系统的容错控制策略引起偏航误差分布的形状不同, 而偏航静态偏差影响偏航误差分布位置。 风向测量值和实际来流风向的分布偏置情况,如图2 所示。

图2 偏航静态偏差Fig.2 Yaw static deviation
由图2 可知, 当存在偏航静态偏差θ0时,实际偏航误差的分布位置为分布2, 以θ0为基线左右分布,当偏航静态偏差消除后,偏航误差的分布由分布2 位置修正到分布1 位置。 风电机组同一控制策略及参数, 存在偏航静态偏差的分布2 和不存在偏航静态偏差时的偏航误差分布1 形状,分布位置却存在差异。
某机组同一时期同步采集的机舱后风向标和激光雷达测量的偏航误差如图3 所示。由图可知,机舱后风向标测试的偏航误差以0°线为中心左右分布,机组不存在偏航静态偏差。利用机舱式激光雷达测风仪测量的机组实际偏航误差,约以10°线为中心左右分布,偏航静态偏差约为10°。


图3 偏航误差的实测数据Fig.3 Measured data of yaw deviation angle
经分析两组数据特征可知, 仅通过风向标测量值直观分析无法获取机组的偏航静态偏差。 而且大部分机组也不具备测量来流风数据的条件,如不通过实际测试, 机组的偏航静态偏差较难获取而被忽略,导致偏航误差的分布整体偏移,机组长时间处于无法准确对风的状态。
2.2 偏航静态偏差的影响因素
偏航静态偏差的产生与风向标测量准确度密切相关。 影响风向标准确测量的原因均能产生偏航静态偏差,所以风向标的安装精度、测量精度、叶片紊流、 偏航位置等均能对偏航静态偏差产生影响[10],[11]。
2.3 偏航静态偏差对发电性能影响特征分析
根据贝兹理论,风电机组捕获功率为

式中:P 为风轮吸收的功率;ρ 为空气密度;S 为叶轮扫掠面积;Cp为风能利用系数;v 为风速。
当风电机组存在偏航误差时,式(1)为

式中:P′为存在偏航误差时风轮吸收的功率;θ 为偏航误差。
由式(2)可得,由于偏航误差导致的功率损失为

由图3 可知,机组由于存在静态偏差角,导致偏航偏差角的分布整体右移, 机组长时间处于偏航状态无法准确对风,最大偏航误差约为15°。根据式(3)计算,功率损失约为9.87%,但由于偏航静态偏差的存在,最大偏航误差增大到约30°,功率损失高达35%。
偏航静态偏差的存在大大增加了偏航控制性能误差对偏航误差的影响, 使得偏航控制策略越优化, 机舱的偏航位置跟踪风向标测量数据越准确。 偏航静态偏差越大,则偏航误差越大,发电性能损失越大。
假设Cp为定值,根据式(1)可得启动风速和额定风速之间的风电机组输出功率增量为

式中:ΔP 为风速增加 Δv 时的功率输出增量;vr为额定风速;Pr为额定功率。
定义风电机组输出增长量损失在不同风速下随单位风速变化、偏航控制性能误差、偏航静态偏差变化的敏感系数为k。

式中:θ0为偏航控制性能误差。
将式(4)带入式(5)中,并假设 vr=11 m/s,Pr=2 000 kW,计算 θ0=5 °时,k 随风速、偏航静态偏差的变化曲线,如图4 所示。

图4 k 随风速及偏航误差的变化Fig.4 Variation of k with wind speed and yaw deviation angle
由图4 可知,风速大于7 m/s,偏航静态偏差大于5°时,风速每增加1 m/s,风电机组的功率损失呈指数增长,对机组发电性能的影响较大。而当风速超过额定风速时, 机组输出功率保持在额定值附近,受风速和偏航静态偏差的影响变小。
某2 MW 机组偏航静态偏差分别设为2.5°,5°和10°时,该机组的启动风速为3 m/s,额定风速为11 m/s,测试功率特性曲线如图5 所示。由图可知:风速在3~7 m/s 时,机组的功率特性曲线受偏航静态偏差的影响较小; 风速在7~11 m/s 时,机组的功率特性曲线随偏航静态偏差的增大而明显右移劣化, 机组的输出功率受偏航静态偏差的影响敏感度较高;风速大于11 m/s,机组输出额定功率、输出功率受偏航静态偏差的影响很小。

图5 不同偏航静态偏差的功率特性曲线分析Fig.5 Analysis of power characteristic curves for different yaw static deviations
由以上分析可知, 机组输出功率受偏航静态偏差的影响在不同的风速下体现出敏感度不同的特征,低风速段和高风速段敏感度较小,中风速段敏感度较大。所以在对偏航系统进行优化时,应结合偏航静态偏差对机组发电性能的影响特性,在不同的风速段采用不同的优化策略。
3 基于实测的优化方法及实例分析
风电机组机舱式激光雷达测风仪安装在机组机舱上方, 可精确测量多个水平方向的来流风数据, 由此可获得机组的机舱轴向方向与来流风的偏差数据,即偏航误差。通过测试偏航误差的分布趋势,计算机组的偏航静态偏差,并对其进行修正补偿,优化机组的发电性能。
为了减小分析结果的不确定性,从叶轮前1D~4D(叶轮直径),间隔0.5D,测量的风数据。 在进行偏航误差测量, 应采集机组的来流风速和输出的有功功率数据。
根据偏航静态偏差对风电机组发电性能影响的规律,同时考虑受偏航扇区的影响特征,建立优化模型。
3.1 建立优化模型
对偏航静态偏差的最终优化目标是提升机组的发电量,但是影响机组发电量的因素较多。当采用实测的方法进行优化时, 优化前后采集数据的时间段不同, 可能测试阶段的风资源情况或机组故障次数不一致。 如果直接以实际发电量为优化目标,可能导致偏航静态偏差优化的精度降低,出现过度修正或修正不足的情况。为剔除风资源、机组可靠性等对发电量指标的影响,保证优化效果,本文以评估的年发电量作为优化目标,即:


式中:AEP 为评估年发电量;Nh为年小时数,8 760 h;N 为风速分区间个数;Vi为第 i 个风速分区间标准化的平均风速;Pi为第i 个风速分区间标准化的平均输出功率;F(V)为风速的瑞利累积概率分布函数;Vave为轮毂高度的年平均风速,分别取4,5,6,7,8,9,10,11 m/s;V 为风速。
以年评估发电量最大为目标,建立优化模型为
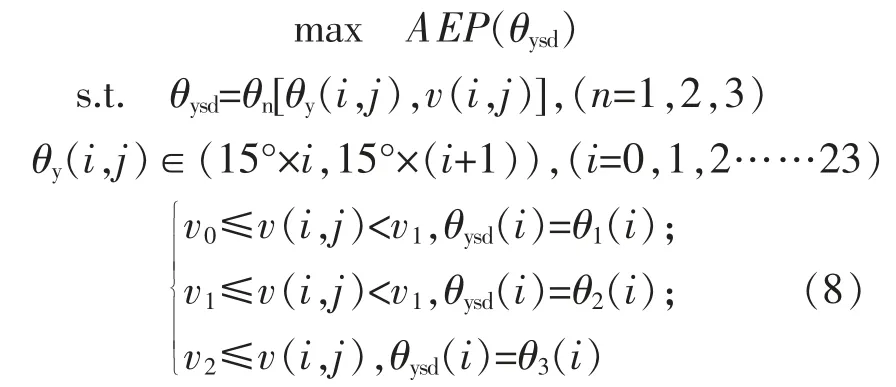
式中:θysd为偏航偏差补偿角度;θn为第 n 个风速区段测试的偏航静态偏差;θy(i,j) 为测量的第 i个偏航扇区中第j 个偏航位置角;v0为启动风速;v1低风速段阈值;v2为额定风速;v(i,j)为测量的第i 个偏航扇区的第j 个风速数据。
本优化模型将风速区段分为3 段,低风速段、中风速段和高风速段,根据偏航系统控制策略中要求的风速阈值对风速段的阈值进行划分。 在计算偏航静态偏差时,应对风速区段分别进行计算。采用激光测风仪得到偏航静态偏差后,在偏航控制策略的偏航角度计算环节对偏差进行综合补偿,对比优化前后机组的年评估发电量,最终确定各偏航扇区、各风速段的偏航偏差补偿角度。
3.2 实例分析
根据上述优化方法, 对某2 MW 机组开展了偏航静态偏差测试及优化,机组参数如表1 所示。
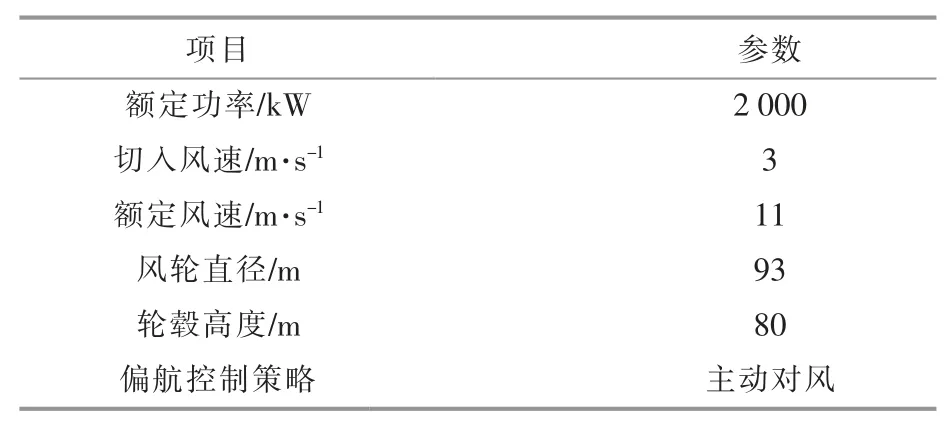
表1 被测机组参数Table 1 Measured unit parameter
测试前,根据标准IEC61400-12-1 对测试机组地形进行评估,考虑地形、障碍物以及其他风电机组的影响,对机组偏航扇区进行了分组。本文以机组的299~81°偏航扇区的数据为例, 说明偏航静态偏差优化过程。
参考该机组偏航控制策略, 将低风速阈值定为6 m/s,高风速阈值定为11 m/s。 整个测试优化过程分为3 个阶段。
第1 阶段为偏航静态偏差测试, 利用前文方法,开展偏航静态偏差测试,同时统计机组的功率特性曲线, 估算机组存在偏航静态偏差时的AEP。第2 阶段为偏航静态偏差的初步优化,根据第1 阶段测试收集到的偏航误差数据, 不考虑风速区间因素, 利用所有数据计算机组的综合偏航静态偏差, 然后在偏航控制策略的偏航角度计算环节对偏差进行综合补偿。 此阶段根据测试进度要求,建议采用分步补偿的方法开展优化,优化步长可设置为2.5°,优化至AEP 开始下降为止。 通过此阶段, 可对机组在不同风速区间受偏航静态偏差的影响敏感度进行分析, 对风速分区间的阈值进行验证,并将之前根据控制策略设定的6 m/s修正至7 m/s。 第3 阶段为偏航静态偏差的再优化, 不同的风速区间对偏航静态偏差进行分别优化,实现机组AEP 最优。
经过以上3 个阶段优化测试及综合分析,最终确定该2 MW 机组299~81°偏航扇区的偏航静态偏差补偿方案,3~7 m/s 风速段的补偿角度为11°,7~11 m/s 风速段的补偿角度为 9.6°,大于11 m/s 的风速段补偿角为10.2°。偏航静态偏差补偿前后的功率特性曲线对比如图6 所示。
由图6 可知, 补偿后机组的功率特性曲线明显左移,优于机组的保证功率特性曲线。 经计算,机组的功率特性曲线保证率由96%优化至103%。 根据式(6)计算优化前后轮毂高度年平均分布分别为 4,5,6,7,8,9,10,11 m/s 时的年发电量,优化后,年发电量最大可增发328 MW·h,提升约6.6%。
4 结论
风电机组的偏航静态偏差逐渐成为影响偏航误差的主要因素,且相较于偏航控制性能误差,偏航静态偏差更易于利用工程手段进行优化。 考虑偏航静态偏差影响因素和对发电性能的影响规律, 本文提供了一种基于实测的偏航静态偏差评估与优化方法。 通过实例分析, 测试机组存在约10°的偏航静态偏差, 优化后功率特性曲线保证率提升约7%。 本方法可操作性强、效果明显,适合于在运风电场的机组发电性能优化提升。