NSI2000 天线近场测试系统Y 轴故障维修
2020-05-01逯毅星李威锋
逯毅星,李威锋
(中国空空导弹研究院,河南洛阳 471009)
0 引言
NSI2000 天线近场测试系统是一套现代化的自动测量设备,经过多年使用,出现扫描探针Y 轴运动定位精度下降,以及Y 轴步进电机工作温升过高导致损坏等故障,急需修复。
1 故障现象
(1)设备Y 轴传动机构工作时发出异响,尤其是扫描探针沿Y 轴做由下而上的扫描运动时还伴随着同步带的振颤。
(2)扫描探针沿Y 轴运动时定位精度差。
(3)Y 轴步进电机工作温度偏高,导致电机烧坏(Y轴电机驱动卡于1 年前烧坏过,已更换)。
2 故障诊断
2.1 设备工作原理
NSI2000 天线近场测试系统使用NSI2000 测试软件进行人机交互,通过计算机GPIB 总线连接HP8720 网络分析仪(以下简称网分仪),控制发射天线发出激励信号,扫描探针受到激励信号送回网分仪进行处理,结果经GPIB 总线送NSI2000 软件计算。NSI2000 软件计算测量结果后,经运动控制总线发出指令,使运动控制系统移动到下一指定位置进行测量,到位后发出触发信号控制网分仪进行信号采集,完成测量闭环。通过天线和探针不断地相对移动,将相对应的位置数据与幅相数据分别记录并显示在近场分布图的横轴与纵轴上,最终完成对天线的近场测量。
2.2 故障诊断分析
按照先易后难,由简入繁的原则,需要对可能影响的部位进行检修。先后对测量天线和网分仪进行了校正,传输电缆和信号接口重新连接固定,减小运动时的附加力。经过初步检修后故障未消失,可以初步排除天线测量、负载和信号干扰等可能性,随即将故障分析的重点转向运动控制系统。运动控制系统主要由PC 端、ARC 箱(近场扫描驱动箱)、步进电机和传动机构等4 部分组成。
PC 端通过NSI2000 Antenna Measurement System 软件下的“Measurments”和“Hardware”窗口分别提供图形化的测量运动控制和运动系统的参数配置调整功能,如图1 所示。在测量菜单下提供了单轴点位控制功能,为后续故障测试提供了便利条件。

图1 “Measurments”和“Hardware”窗口
ARC 箱由驱动信号处理输入、输出板,伺服电源和伺服模块等组成。主要完成信号放大、动作连锁保护、测量触发等功能。
由于NSI2000 运动控制系统传动机构具有载荷轻、快速定位和精度要求高的特点。扫描支架采用轻量化设计,使用步进电机作为执行元件,选用同步带为传动元件。步进电机将ARC 箱发出的脉冲信号转化为角位移,再通过同步带将角位移转换为直线位移,探针沿Y 轴由同步带牵引移动。
配重滑块的作用是平衡探针架的重量,不仅能够保持在静止状态下传动机构的平衡,同时对工作状态下Y 轴步进电机的发热有重要影响。根据牛顿第二定律(F=ma),如果配重质量偏大则惯性增大,必然使电机输出驱动力增加,导致Y 轴移动时步进电机负载增加而发热;若减小配重质量,将导致Y 轴在定位锁紧时,步进电机需提供较大的制动扭矩,导致电机发热。
现场试运行观察发现,带轮和同步带有轻微磨损现象,驱动轮侧运行噪音较大。怀疑同步带老化,造成承载层拉长,节距增大,使驱动轮与同步带带齿干涉,产生噪声和定位精度误差。
3 故障维修
3.1 维修前定位精度检测
由于该设备对Y 轴定位精度有较高要求(≤0.075 mm),因此在机构维修调整前,需进行定位精度检测,为后续装调留下原始数据。
Y 轴定位精度检测使用英国雷尼绍XL-80 激光干涉仪进行,测量时Y 轴位移通过NSI2000 软件下[Move axes]命令执行。测量结果通过雷尼绍XCal-View 软件进行分析。扫描探针沿Y轴运动的整个测量行程定位精度最大误差为0.677 1 mm,反向间隙为0.216 7 mm。
3.2 维修与调试
3.2.1 同步带选型与替换
从上述测量结果中可以看出,定位误差远大于0.075 mm的允许值。必须对传动机构进行调整,对磨损的零件进行更换才能消除故障。由于该设备订购年代较久,国外厂商零备件供应无法保证,只能对Y 轴传动机构的部件进行国产化替代。通过测量原装传动部件相关尺寸,寻找尺寸接近的国产备件,最终确定带轮规格(表1)和同步带规格(表2)。

表1 带轮规格

表2 同步带规格
由于同步带是直线位移的传动元件,它本身是弹性体,对精度有重要影响。在不同力的作用下,会有不同程度的拉伸,不同材料,拉伸量也会不同。选取两种不同材料的同步带进行对比试验,结果见表3。经过运行噪声、运行平稳性、重复定位精度对比,最终选用以氯丁橡胶和玻璃纤维为材料组成的同步带。

表3 试验结果
3.2.2 步进电机故障维修
Y 轴运动过程中步进电机温升过快,升至85 ℃左右。经过观察分析,由于扫描支架的轻量化设计,Y 轴步进电机是通过4个铝制长螺杆为支撑,固定在两级皮带减速机构上。由于疲劳磨损等原因,其中2 只长螺杆根部断裂,在转动状态下电机会发生倾斜,静止状态下电机回位,故障状态非常隐蔽。由于转动状态下电机倾斜,传动轴系相互不平行,致使传动阻力增大、负载加重,造成步进电机温度过高。
首先,加工更换电机固定螺杆,重新调整皮带减速机构张力,排除传动轴系相互不平行问题。考虑到步进电机长期经受高温运行,为保证安全可靠,决定对Y 轴步进电机进行更换。由于该电机为原厂配套电机,标识不清;通过查线、检查步进电机驱动板接口设置等方法,最终确定电机接线方法,见表4。
3.2.3 定位精度补偿
在机械机构调整完成后,针对定位误差中的线性误差部分,通过在NSI2000 控制软件中“Hardware”选项下的参数,可以调整Y 轴步进电机控制参数进行位置精度补偿。“Out-putscale”是步进电机转动1 步时,Y 轴的移动距离,“Backlask”是Y 轴反向间隙,如图2 和图3 所示。通过激光干涉仪重复测量Y 轴的定位精度,使用夹逼法不断优化参数OutPutscale、Backlash,使误差曲线逐渐平坦、正反向误差曲线开口减小。通过比较,选择定位精度最佳时对应的参数,最终确定:Out-Putscale=0.063 55 mm,Backlash=0。

表4 步进电机接线
4 维修结果
4.1 定位精度
使用激光干涉仪对维修后Y 轴定位精度进行测量。维修后在700 mm 测量行程定位误差最大0.062 1 mm,反向间隙最大误差0.019 4 mm。Y 轴传动机构定位精度、反向误差,对比维修前提升了一个数量级。
4.2 电机温度
使用红外测温仪测量维修后的步进电机在工作状态下的温度。由电机温度随时间变化的曲线可以看出,在前80 min内电机温度随时间近似成线性上升,在80 min 之后温度变化较为缓慢,特别 在 100~140 min 温度仪上升0.6 ℃。可以认定连续工作2 h 后电机达到热平衡状态,即电机已达到在额定工况下运行温度,即最高温度为53.2 ℃,处于电机工作温度允许的范围内(最高温度80 ℃),维修前电机温度是85 ℃,维修效果明显。
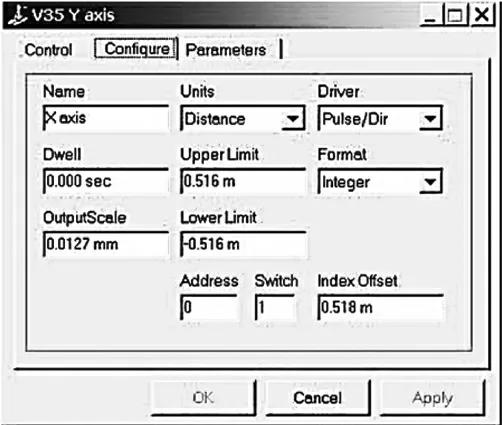
图2 步进电机配置

图3 步进电机参数
