基于机器视觉和无线传输技术的路况全局俯视反馈系统
2020-04-20江岳桉张雪芳
江岳桉 张雪芳

摘 要:在转弯和路口路段,因大车或建筑导致视野受阻而造成的交通事故不计其数,且问题存在已久。本项目主要通过在交通事故多发路段架设高空摄像头,并用无线信号发送视频信息,当汽车靠近事故多发路段时,车内接收装置便可接收来自发射器的信号,并通过机器视觉对车辆行驶轨迹进行智能分析,若其它车辆与所驾驶车辆存在接触可能,设备便会向司机发出语音提示,并提供实时全局俯视影像。这样以来,既解决了行车时视线被遮挡的问题,又可以使司机对路段路况有一个全局的把控,可以有效避免交通事故的发生,在全局上最大限度地减少各种交通事件对道路运行产生的不良影响,减少后继交通事故的发生,避免事态的扩大,保障车辆在道路上安全、畅通无阻的行驶。
关键词:ITS;智能交通;交通事故;视线受阻;机器视觉;无线传输;俯视影像
1 项目背景
随着私家汽车的普及,道路交通事故率逐年递增,而交通事故多发区域又以路口和转弯处为最。当司机驾车靠近路口时,常存在因旁边有高大车辆或建筑阻挡视线,而影响对前方路况的预判,以至导致误闯红灯,拐弯卷到行人,被横向车辆撞击,甚至其他十分严重的事故。交管部门规定若因前车遮挡视线而误闯红灯,可以申请撤销罚分,也佐证了道路交通领域在此方面存在欠缺。
2 目的和意义
目的:解决事故多发路段因大车或建筑遮挡导致视野受阻而造成的交通事故问题
意义:通过本产品的应用,司机靠近事故多发路段时,便可以获得路段的实时全局俯视图及声音提示,既解决了行车时视线被遮挡的问题,又可以使司机对路段路况有一个全局的把控,可以有效避免上述交通事故的发生,保证道路畅通。
3 可应用案例
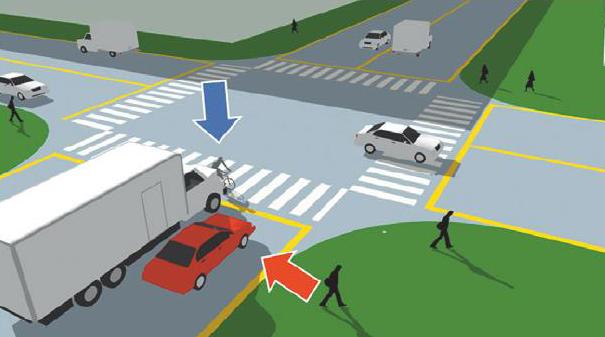
如上图所示路口,一个典型的“鬼探头”事故:
自行车刚到路口时,左右方向信号灯是绿灯;
自行车走到路口中间时,信号灯发生变化,上下方向变为绿灯;
卡车司机见自行车行至一半,于是未发动汽车,等待自行车行过;
红色轿车自图片下侧驶来,由于大卡车遮挡视线,不能提前发现自行车;
红色轿车与自行车间发生碰撞。
若在该路口架设本项目外设装置,车内司机便可通过车载装置所供俯视影像发现自行车,从而避免事故的发生。
4 项目方案
4.1 综述
设计的基于机器视觉和无线传输技术的路况全局俯视反馈系统,有路段外设装置和车载接收装置两大部分。由视频采集、无线传输、数据处理、图像显示和语音播报等几大模块组成。
4.2 外设装置
路段外设装置主体分为图像采集器、无线传输结构、能源装置、机械固定结构几部分。图像采集器选用高清摄像头,可对事故多发路段全局路况进行采集;无线传输装置选择定频电磁波辐射器,将视频采集器采集的信号通过发射装置定频辐射,以供车载接收器的信号接收;能源装置采用蓄电池和太阳能板相结合,阳光充足时太阳能板供电的同时给蓄电池供电,阳光不充足时蓄电池供电;机械固定结构对各模块装置进行结合固定。
4.3 车载装置
车载装置主体分为显示器、无线接收装置、数据处理模块、声音模块和数据转换器。显示器选用便携式液晶显示屏,兼顾体积和清晰度;无线接收装置采用定频信号接收器,将接收装置与外设装置的发射器调至相同频段,可实现靠近事故多发路段时的信号自动搜索接收;声音播报模块可在靠近事故多发路段时对司机进行声音提示,可解决司机驾车期间无法顾及图像显示器的问题;数据装换器旨在将显示器、无线接收装置、声音装置几部分进行有机结合。
数据处理模块依托于机器视觉系统的车辆检测技术,集合了模式识别、运动目标检测、视频图像收集技术的综合性视觉检测技术。应用摄像机的标定法,可以算出其内部的参数,由于参数不会受到外界环境的制约,可以展开摄像机的离线标定。既节约了实时测距程序的时间,又能够借助反复标定,获得更加精确的参数,从而有效解决了摄像机标定中的误差。此外,借助机器视觉系统中的车辆检测及其与前方车辆的测距算法,可以完成对车辆辅助系统软件的编程,生成警报系统,为司机安全驾驶提供重要的技术保障。
机器视觉算法、无线传输技术、全局俯视影像、声音系统等几大部分的有机结合和面向智能交通领域改造是本设计要解决的根本性问题。
5 核心算法
5.1 帧间作差法
将摄像头捕获的视频图像除去颜色信息(灰度化处理),再将相邻两帧图像对应位置像素的亮度信息做差,因为相邻两帧圖像中,静态物体图像并没有发生变化,所以所得帧差图中大部分区域亮度为0,不为0的区域即是运动物体所在区域。将相邻两个帧差图做比较,像素平移的距离,换算成实地距离,再除以邻帧时间间隔,即为运动物体的瞬时速度,像素平移方向为运动方向。将所得两个相邻瞬时速度差除以邻帧时间间隔,即求得运动物体的瞬时加速度。当有了物体的瞬时速度、加速度,即可预测运动物体短时间内运动轨迹,若某一运动物体的运动预测轨迹,与所驾车辆的轨迹在同一时间发生交汇,则认为存在碰撞风险,触发语音报警器响司机报警。
5.2 基于 Bag-of-Features 特征的车辆检测算法[1]
通过车辆的边缘化特点与BOF的模型有机的整合,可以对前方正地运行的车辆展开实时性的检测,具体包括两方面内容,即生成车辆的假定存在区、假设区的验证。第一,要对相关的图像做预处理,然后,应用边缘检测技术进行再次处理,可以得到车辆的假定存在区。再借助BOF最近邻域的计算方法,对假定的存在区加以验证,进而将虚警目标排除,极大地提升了车辆检测的效率与精确度。
5.3 基于机器视觉系统的前方车辆的测距算法[2]
运用单目视觉系统
单目视觉系统指的是借助一个摄像机来测算距离,这是现阶段我国对前方运行车辆进行测距的重点研究方向。因为不一样的坐标系,彼此存在相应的关系,因此,人们可以分析二维、三维图像的空间关系,进而计算测量的实际距离。
投影模型的算法
摄像机的成像与测距过程,可视为彼此逆向的过程。成像一般将实际生活中的三维图象投射于二维平面图象的过程。而测距则是将二维平面图转化为三维图像,进而可以得到前方运行车辆的具体方位,同时,可算出需要测量的实际距离。本文主要应用了不同维度的坐标系之间的立体关系,通过投影整合摄像机标定的测量方式实现对前方车辆的测距。这种方法主要应用了摄像机的投影模型,进而推导出适合的测距公式。只是公式里含有一些摄像机内部的参数,必须通过摄像机的标定法获得然后,再将其带入推导的公式里,计算实际的距离。
6 总结
以“鬼探头”为典型案例的视野受阻类交通事故问题存在已久且亟待解决,本文提出的解决方案,通过外置设备采集路况俯视影像并传输到车载设备上,转换了视角,可有效消除视野盲区,再结合机器视觉对采集到的图像进行分析,为司机提供危险预警,有望较大程度缓解此种视野盲区类交通事故问题。
参考文献:
[1]梁炳春,孙韶媛,彭宝,赵海涛.基于Bag-of-Features算法的车辆检测研究[J].微型机与应用,2016,35(01):95-98.
[2]佟卓远. 基于机器视觉的前方车辆检测与测距系统设计[D].哈尔滨工业大学,2015.
