园区自动驾驶车辆测试方案设计与应用
2020-04-20王平李秋霞王志刚李秋晨王海波李旭东
王平 李秋霞 王志刚 李秋晨 王海波 李旭东
摘 要:本文介绍园区自动驾驶车辆测试用例设计,并通过实施、修改和完善应用于首钢园区自动驾驶概念车项目。
关键词:自动驾驶;测试方案
1 引言
隨着AI技术的高速发展,汽车自动驾驶成为汽车业的新热点。当前自动驾驶汽车尚处于未落地阶段,落地前通过功能性能的实际道路测试必不可少,如何设计一套自动驾驶汽车测试方案成为业界新的问题。2018年2月为贯彻落实《北京市关于加快推进自动驾驶车辆道路测试有关工作的指导意见(试行)》《北京市自动驾驶车辆道路测试管理实施细则(试行)》有关要求,市经济信息化委、市交通委、市公安局公安交通管理局联合制定了《北京市自动驾驶车辆道路测试能力评估内容与方法(试行)》和《北京市自动驾驶车辆封闭测试场地技术要求(试行)》,为自动驾驶车辆道路测试能力的评估内容与方法和自动驾驶车辆封闭测试场地技术要求做出了试行性指导。试行的指导是否足够清晰,是否足够明确,是否足够完善都需要从实践中实施、修改和完善。本文针对上面的指导性文件如何在园区自动驾驶车辆测试中实施、修改和完善提出了一套方法。
2 园区自动驾驶汽车的测试方案设计
按照《北京市自动驾驶车辆道路测试能力评估内容与方法(试行)》,将自动驾驶车辆道路测试能力评估内容分为:
认知与交通法规遵守能力
自动驾驶车辆对道路、标志标线及附属设施的认知能力以及对交通法规的遵守能力。
执行能力
车辆在场地内行驶时应保持一定和横纵向控制误差,并且能够在直道和弯道路段横纵向控制误差能够满足功能需求。
应急处置与人工介入能力
车辆遇到系统无法处理的故障时应立即以人可以感知的方式提醒驾驶员并且平稳停车。在面临系统无法处理的场景时,驾驶员能够接管并操纵车辆,人工介入的方式包括操纵制动踏板接管和操纵方向盘接管,接管后车辆的横纵向可控。当按下车辆的紧急停车按钮的时,车辆能够执行最大制动力进行紧急停车。
综合驾驶能力
自动驾驶车辆在指定行驶场景下,指定动态驾驶任务时,能自觉遵守交通法规,有效处置动态交通状况,正确操纵车辆的能力。根据园区应用场景,这些能力包括:起步停车、跟随行驶、变更车道、路口直行、路口转弯、路口掉头、靠边停车、紧急制动、倒车入库等。根据园区环境修改部分场景,包括测试车速、车辆故障处理,增加部分场景,包括路口遇静态障碍物提醒、保护行人、动态目标非常规横穿。
细化测试内容(表1)
3 园区自动驾驶汽车的测试方案应用
车辆故障处理
1.自车以20km/h的速度直线行驶;
2.人工注入故障(例如:拔掉激光雷达电源线);
3.观察车辆是否进行故障处理(例如:提醒、减速和停车);
急停按钮
1.自车以20km/h的速度直线行驶;
2.驾驶员或者副座位拍下急停按钮;
3.观察车辆状态与车辆状态提醒;
人工介入停车
1.自车以20km/h的速度直线行驶;
2.评估人员下达人工介入停车指令;
3.驾驶员踩下刹车按钮;
4.观察车辆状态与车辆状态提醒;
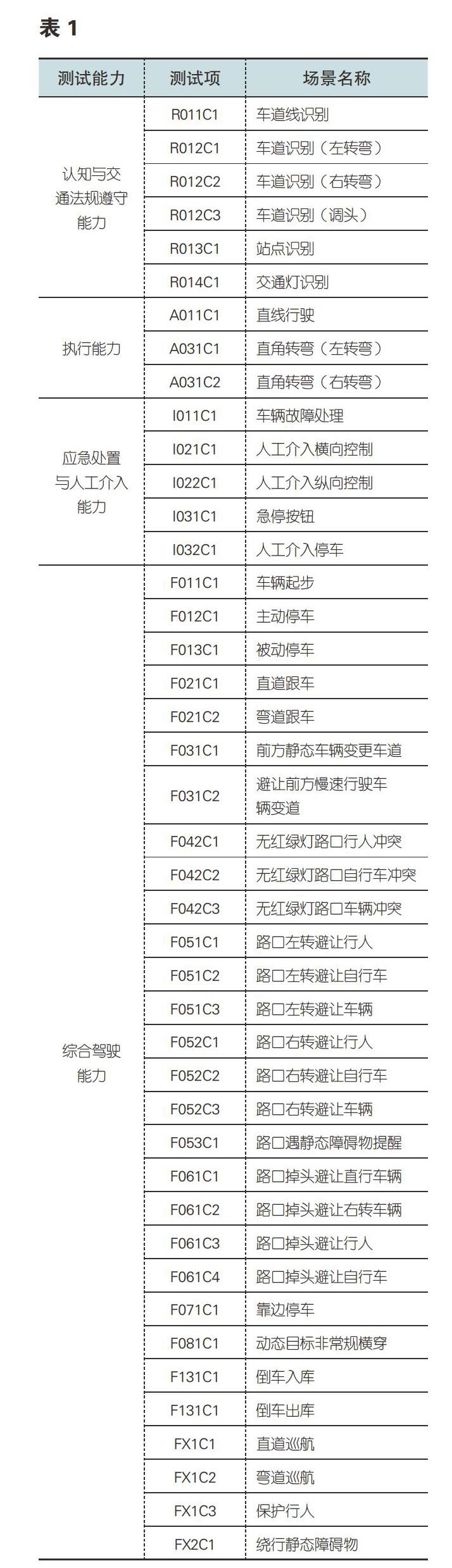
避让前方慢速行驶车辆变道(图1)
1.自车和动态目标初始距离50m;
2.自车加速至20km/h并匀速行驶;
3.前车以5km/h的速度低速行驶;
4.自车变更车道通过;
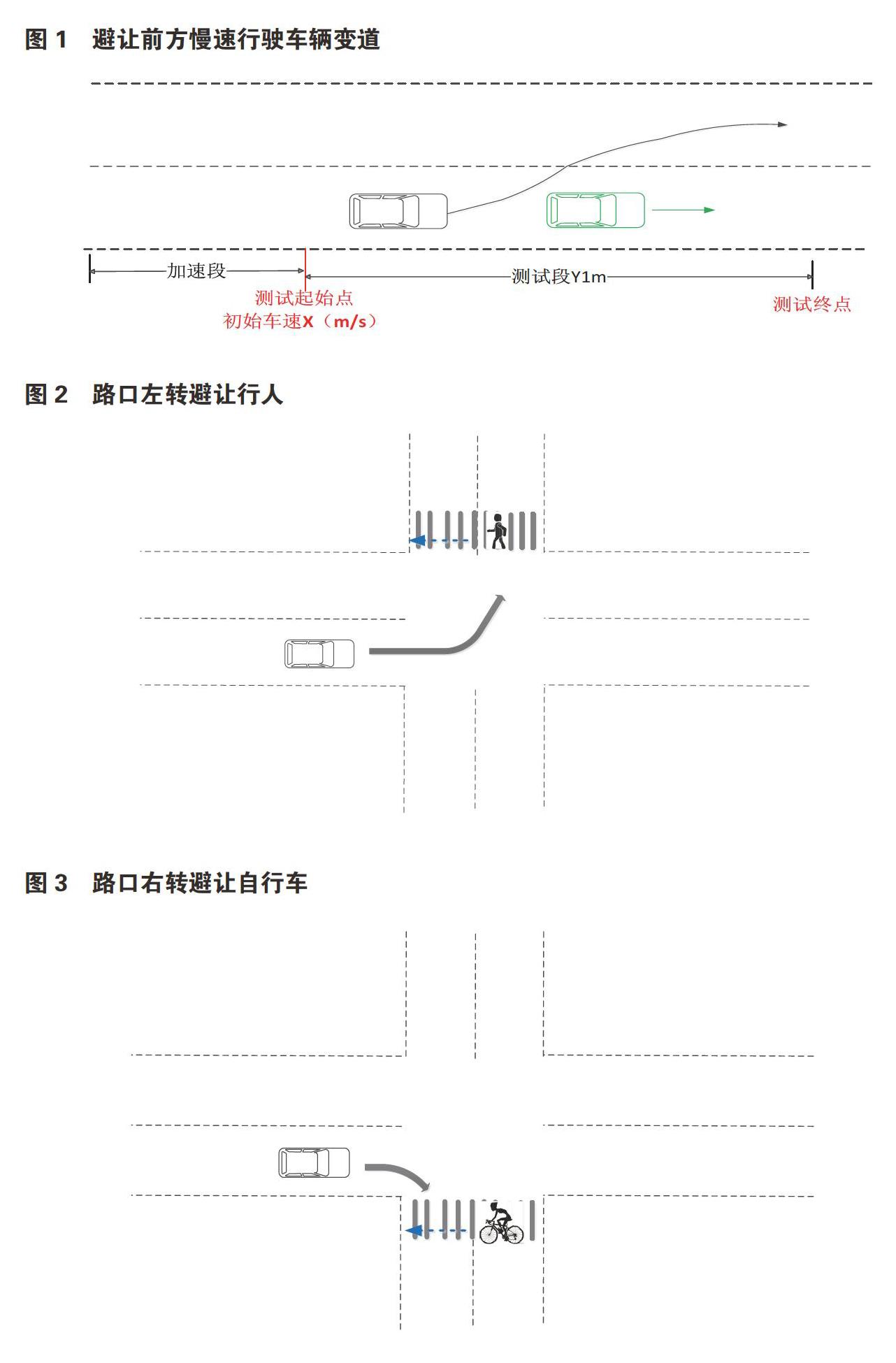
路口左转避让行人(图2)
1.预先在距离测试起始点50m的点设置测试终点;
2.车速在加速段达到20km/h,并进入匀速行驶,此时设置为测试起始点;
3.车辆左转;
4.行人横穿人行横道,行人速度为5km/h;
5.自车减速或停车避让行人,待行人通过后继续左转;
路口右转避让自行车(图3)
1.预先在距离测试起始点50m的点设置测试终点;
2.车速在加速段达到20km/h,并进入匀速行驶,此时设置为测试起始点;
3.车辆右转;
4.自行车穿过人行横道,速度为8km/h;
5.自车减速或停车避让横穿自行车,待自行车通过后继续右转;
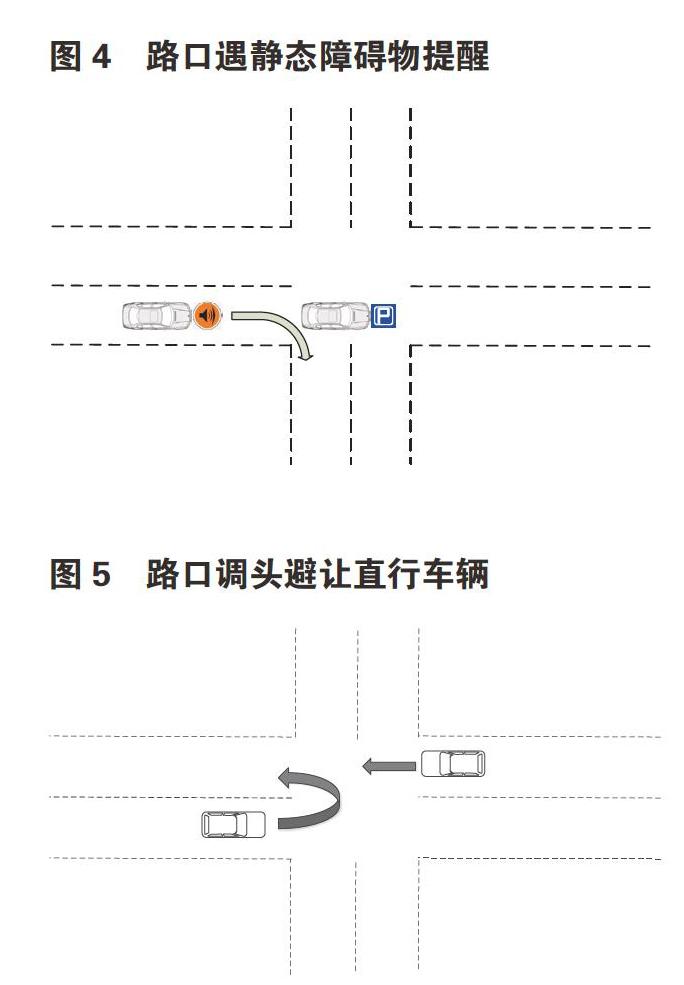
路口遇静态障碍物提醒(图4)
1.预先在车辆路口行驶线路上放置静态障碍物,包括行人、车辆;
2.车辆行驶到路口,遇障碍物停车,5秒以上后,小声鸣笛一声提醒前方障碍物;
3.前方障碍物10秒内离开规划线路,车辆起动继续行驶;
4.前方障碍物10秒内未离开规划线路,提醒安全员接管;
路口调头避让直行车辆(图5)
1.预先在距离测试起始点50m的点设置测试终点;
2.车速在加速段达到20km/h,并进入匀速行驶,此时设置为测试起始点;
3.配合车辆直行通过路口,速度为20km/h;
4.车辆掉头(若直行车辆先进入碰撞区域,自车需要进行减速或停车避让:若自车先进入碰撞区域,车辆掉头后速度规划应合理避免与直行车辆发生碰撞);
5.掉头结束后根据道路交通状况行驶至路段规划车速;
靠边停车(图6)
1.预先在距离测试起始点50m的点设置测试终点;
2.车速在加速段达到20km/h,并进入匀速行驶,此时设置为测试起始点(停车点触发);
3.车辆换到最右侧车道;
4.车辆在道路边缘线附近准确停车;
动态目标非常规横穿紧急制动(图7)
1.预先在距离测试起始点50m的道路边沿设置动态障碍物;
2.车速在加速段达到20km/h,并进入匀速行驶,此时设置为测试起始点;
3.测试开始,动态障碍物突然出现在距离自车15m的路径上;
保护行人(图8)
1.预先在距离测试起始点50m的前方设置动态车辆;
2.车速在加速段达到20km/h,并进入匀速行驶;
3.自车规划路径的车道线外有行人,静止或正常速度向前行走;
4.自车保持规划路径最大行驶或降低速度行驶;
4 结语
本文根据《北京市自动驾驶车辆道路测试能力评估内容与方法(试行)》和《北京市自动驾驶车辆封闭测试场地技术要求(试行)》的指导,设计园区自动驾驶车辆道路测试能力评估内容与方法,并根据实际情况对其进行和修改和补充。特色的场景有:保护行人场景,旨在遇到处于车道外但靠近车辆行走的行人时减缓降低车速,车辆降速的行为一方面告知行人已经被注意到,增强了行人的安全感,另一方面增加了车辆处理异常情况的应对时间,保证了行车安全;路口遇静态障碍物提醒场景,对应在路口复杂场景下,前方行人或者车辆由于无意识阻挡路口行车路线,在没有提醒的情况下不会让行的情况。增加鸣笛一声提醒,及起到提醒作用也不会产生让对方方案的噪音,产生了良好的用户体验。
后续工作需要在各个需要落地的场景,按照《北京市自动驾驶车辆道路测试能力评估内容与方法(试行)》和《北京市自动驾驶车辆封闭测试场地技术要求(试行)》的指导细化和完善测试内容和方法,让自动驾驶更安全、更人性化、更好的用户体验,为自动驾驶车辆落地提供可靠保证。
