时滞分布参数系统的移动传感器/执行器防碰撞控制
2020-04-11付焕森崔宝同
付焕森崔宝同
(1.轻工过程先进控制教育部重点实验室;江南大学物联网工程学院,江苏无锡 214122;2.泰州学院船舶与机电工程学院,江苏泰州 225300)
1 引言
物联网技术的快速发展提升了传感器和执行器的智能处理能力,使得以移动传感器/执行器网络(mobile sensor and actuator networks,MSAN)为基础的人工智能(artificial intelligence,AI)技术成为当前研究的热点问题.该技术在军事领域的战场实时监视和目标定位、生态环境的自动监测与控制、仓储物流管理以及智能交通安全等方面得到了广泛的应用[1–3].
移动传感器/执行器的控制系统要求执行器能够根据传感器检测的数据智能做出处理,不同于传统的固定控制系统,该系统是以时间和空间为变量的分布参数系统,一般用偏微分方程描述.对于以偏微分方程描述的系统,相关控制方法较为典型,有直接求解线性矩阵不等式(linear matrix inequality,LMI)和无穷维算子理论方法,各类方法都有优缺点.Demetriou[4–5]利用算子理论和Lyapunov稳定性分析了移动传感器/执行器的分布参数系统估计与控制.在移动控制过程中,如果大面积范围布置大量的传感器和执行器,防碰撞问题是较为典型的安全问题[6–8];Demetriou等人[9]研究了分布参数系统的估计问题,在文中分析了传感器的防碰撞问题,并给出了传感器最小安全距离;Stipanovic等人[10–11]进一步研究了传感器/执行器的防碰撞问题,并给出了最小安全距离和最大通讯距离;文献[12–14]从一致性、预测控制角度考虑了智能体运动过程中的防碰撞问题;张建中等人[15]研究了一类具有活动边界的分布参数系统的控制策略.时滞现象是各类系统研究不可避免的问题,在化学反应、大气海洋运动等分布参数系统的控制过程中都存在时滞延迟问题,文献[16]研究了一类时滞分布参数系统的反馈控制和鲁棒容错控制;戴喜生等人[17]研究了一类控制时滞的分布参数系统迭代学习方法;Jiang等人[18]利用算子理论研究了时滞分布参数系统的传感器/执行器控制问题;文献[19–22]研究了智能体运动过程的能量消耗问题.
本文是基于移动传感器/执行器研究时滞分布参数系统的稳定性控制,主要是针对分布参数系统中的状态时滞,重点研究了防碰撞问题;文中利用无穷维算子理论和李雅普洛夫稳定性原理,推导出传感器/执行器的控制策略,使得该系统在此控制策略下能够尽快收敛,并且智能体之间是防碰撞的,以及实现了智能体在最大通讯距离下的能耗最低,最后通过仿真实验验证了该控制策略的有效性.
2 问题描述
考虑如下由n个传感器和执行器组成的多输入多输出时滞分布参数系统模型[18]:

系统对应的初始条件

以及边界条件

上述模型中,x(t,z)是系统的状态,t和z分别是系统状态下的时间和位置坐标Ω=[0,l],l为位置坐标z的上限,是区域Ω上的Laplace算子;a1>0,表示系统的扩散系数,a2和a3都为某一正常数;变时滞因子满足0τ(t)τ和(t)η <1;分别表示第i个传感器和执行器的空间位置,分别为第i个传感器和执行器的已知空间分布函数;ψ(t,z)为[−τ,0]×Ω上的光滑函数;ui(t)为系统的控制输入,yi(t)为系统的输出.
假设1为简化理论计算和稳定性分析,假设传感器和执行器的空间分布函数相同,即将同一组传感器和执行器归属于同一个智能体,该假设也符合实际工程应用,即

上述假设可以表示成

式(6)也可以表示为

其中:ε>0;H(θi(t)±ε)是Heaviside 阶跃函数.根据上述传感器和执行器并列的假设,统一以智能体阐述,即智能体包含传感器和执行器的组合,具有传感器检测信息和执行器实现控制的功能.根据式(7)可以得到移动智能体的测量信息,可以得到

问题1如何选择设计时滞分布参数系统的控制器,使得智能体在最小通讯能耗下接受其他信息,避免智能体间的碰撞.
问题2如何选择设计智能体的控制力,使得系统在时滞的影响下能够尽快收敛并得到控制.
本文利用抽象发展方程理论和Lyapunov稳定性来解决控制器和控制力的设计,根据文献[4]的方法,假设XL2(Ω)表示Hilbert空间,和分别表示其内积和范数.
在X上定义内积和范数分别为[4]
定义V为自反Banach空间,其范数为;V ∗表示V的对偶空间,为其范数,且V→X→V ∗,上述嵌入是稠密且连续的,并满足

二阶椭圆算子A1定义为

根据文献[4]得到,Dom(A1)={ψ ∈L2(Ω)|ψ,绝对连续,∈L2(Ω),且ψ(0)=ψ(l)=0}.
算子A2定义为A2ϕ=a2ϕ,a2为某一常数;算子A3ϕ=a3ϕ,a3为某一常数,则可以得到

由上述定义可以推导出算子Acl具备有界性、强制性和对偶性等性质[4],

其中:ϕ ∈V;ψ ∈V;且α和β为正常数.
为降低智能体在防碰撞的移动过程中的通讯能耗,设计反馈控制器

其中:Ni={j ∈{1,2,···,n}|r <|θi−θj|
所以式(14)可以表示为
注1在文献[7,9]中,江正仙和Demetriou针对分布参数系统的MSAN防碰撞问题设定了最小安全距离,未考虑最大通讯距离;文献[10]中,Stipanovic考虑了最小安全距离和最大通讯距离,但未考虑系统的时滞问题;本文针对时滞分布参数系统考虑了最小安全距离和最小通讯能耗下的最大通讯距离.
假设2根据动力学方程,假设移动智能体满足

移动智能体的位置状态θi(t)和速度都是可测的,表示速度求导后得到的加速度;θi(0)=θi0表示智能体的起始位置,=0表示智能体的起始速度为零,这里假设智能体在控制力作用下的速度代表第i个移动智能体的质量,其中di表示摩擦系数,ki表示弹性系数.上述假设在理想状态时,di=0,ki=0,即满足牛顿第二运动定律的表达式.但在考虑实际情况时,智能体在运动过程中存在摩擦力,因与fi(t)方向相反,可设定di <0;对于柔性智能体,弹性系数ki >0,而对于刚性智能体,弹性系数ki=0,所以弹性系数ki0.
在Hilbert空间中,系统的输入可以表示为

由于b(z;θi(t))=c(z;θi(t)),输入算子和输出算子互为共轭,则输出算子为Ci(θi(t))=所以系统输出方程为

时滞分布参数系统(1)的方程演变为

其中Acl=A1+A2.
引理1λ1max和λ3max分别表示算子Acl和A3的上界,λ2max表示B(θ(t))ΓB∗(θ(t))的上界,则有
证易证算子Acl和A3的有界性,故存在实数λ1max和λ3max,使 得成立.
在文献[18]中已经对B(θ(t))ΓB∗(θ(t))自伴算子进行了有界性和正定性证明,且Γ=[rij]n×n为实对称矩阵,所以Γ存在最大特征值.

成立,λ2max为B(θ(t))ΓB∗(θ(t))的上界. 证毕.
3 主要结果
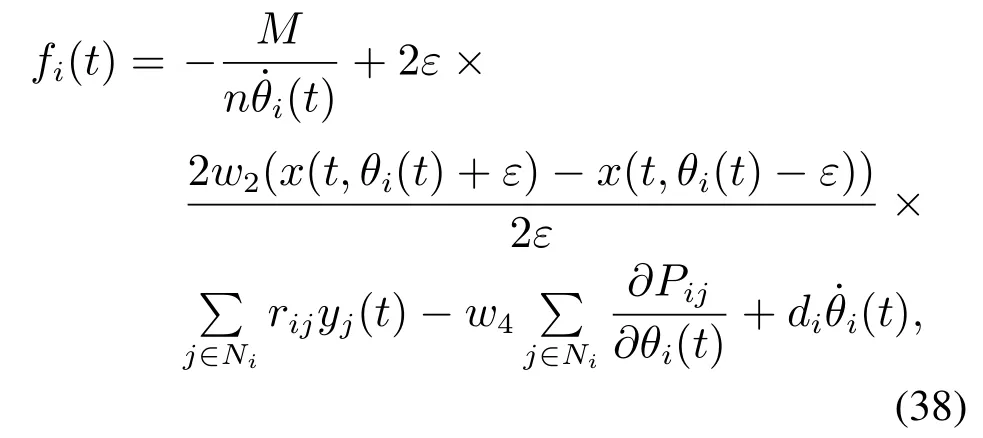
定理1对于时滞分布参数系统(1)–(4),控制器设计为式(14)时,移动智能体的运动控制力设计为
证构造Lyapunov函数[4,10,18]

在V4(t)中引入防碰撞函数

现将V1(t),V2(t),V3(t)和V4(t)沿着系统(19)对时间t进行求导,为证明简便,算子中的变量θ(t)省略,记B(θ(t))=B,其他类同.




从控制力的角度分析通讯能耗,式(21)可改写成
从电路结构的角度分析通讯能耗,智能体通讯能耗模型[19–22]如下:

其中:d=θj −θi,为第i个智能体到第j个智能体的通讯距离;d0为距离阈值;k为两个智能体传输消息的比特数;ETx(k,d)和ERx(k,d)分别表示智能体间传输k个比特消息数所需的发送能耗和接收能耗;ETx−elec(k)和ERx−elec(k)分别为发送能耗大小和接收能耗大小;ETx−amp(k,d)为信号放大器能耗;εfsd2和εmpd4放大器的能耗参数;Eelec表示电路常数,与智能体的电路结构有关.则智能体的通讯能耗为
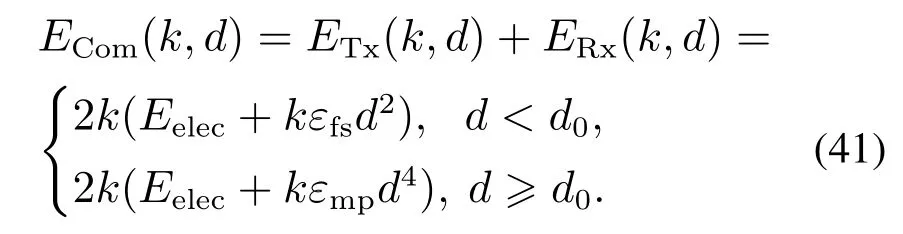
由式(41)可知,通讯能耗ECom(k,d)与通讯距离d和电路常数k,Eelec以及能耗参数有关,文中设计的智能体通讯结构仅为j个智能体到第i个智能体的通讯,其中j=i+1,所以式(41)中d可以取得最小值,即通讯能耗ECom(k,d)最低. 证毕.
4 数值仿真
为验证文中提出的智能体移动控制策略有效性,基于时滞分布参数系统(1)–(4),扩散系数a1=0.002,常数a2=0.03,常数a3=0.01;系统的初始条件设置如下:
假设系统中移动智能体的个数n=5,智能体动力学方程(16)和控制力(21)中相关参数设置为
mi=1,ki=0.005,di=−1,w1=1.2,
w2=1.1,w3=15,w4=1.2,ε=0.04;
防碰撞最小安全距离r=0.1,最大通讯距离R=0.6,5个智能体初始位置设置为
θ1(0)=0.1,θ2(0)=0.5,
θ3(0)=0.7,θ4(0)=0.9,θ5(0)=1.8.
图1是时滞分布参数系统的空间L2范数演变,图2是智能体在控制力的作用下,时滞分布参数系统的状态空间分布.从图1和图2中可以看出系统在移动控制策略下能够很快地趋向稳定.
图3是未考虑防碰撞和最大通讯距离,智能体在移动过程中出现位置交叉,发生了碰撞.

图1 空间L2范数演变Fig.1 Evolution of state L2norm

图2 系统状态空间分布x(t,z)Fig.2 Spatial state of x(t,z)

图3 智能体移动轨迹无防碰撞Fig.3 Each agent trajectory without collision avoidance
图4是移动智能体在设计控制力时增加了智能体间的防碰撞控制,最小安全距离和最大通讯距离,从图4中可以看出智能体在移动过程中未发生碰撞,而且智能体的间距也控制在最大通讯距离范围之内.

图4 智能体移动轨迹有防碰撞Fig.4 Each agent trajectory with collision avoidance
通过对比图2、图3和图4,进一步验证了文中设计的控制策略的有效性,说明时滞分布参数系统是渐近稳定的,并且智能体之间是防碰撞的.
图5为相邻智能体在运动过程中的距离,由图5可以发现,在控制力的作用下,相邻智能体的距离稳定在d=0.46处,通讯距离的稳定决定了Eelec能耗在设定间距条件下最低,即间接验证了式(41)可以取得最小值,即通讯能耗ECom(k,d)最低.

图5 相邻智能体的距离Fig.5 The distance between adjacent agents
5 结论
本文考虑了一类针对状态时滞的分布参数系统移动传感器/执行器的控制问题,运用抽象发展方程理论和Lyapunov稳定性方法,设计了系统的控制器和移动控制力.经理论证明和仿真实验,时滞分布参数系统在此控制策略下是渐近稳定的,通过智能体的移动轨迹证明了防碰撞控制的有效性,以及在最大通讯距离条件下的通讯能耗最低.文中不足之处,尽管已经完成时滞分布参数系统的稳定和防碰撞控制理论性证明,但由于时滞因子较小,难以在仿真实验中给出明显区别,这也是下一步要考虑的问题.
