浅谈海洋平台液位遥测系统
2020-03-31冯相阁
冯相阁

摘 要:液位遥测系统是海洋平台重要的监控系统之一。本文就海洋平台液位遥测系统的设置进行了阐述,包括液位遥测系统的组成、液位信号采集单元的种类以及液位遥测系统各类传感器选择和安装建议等。
关键词:海洋平台;液位遥测系统;传感器;液位采集单元种类
中图分类号:TM938.6;P752 文献标识码:A
Abstract: The tank gauging system is one of the important monitoring systems on the offshore platform. This paper describes the tank gauging system of the offshore platform, including the composition of the system, the types of liquid level signal acquisition units and the selection and installation suggestions of various sensors in the tank gauging system.
Key words: Offshore platform; Tank gauging system; Sensor; Type of Liquid level Acquisition unit
1 前言
海上移动平台(自升式平台、半潜式平台等)通常设置有压载水舱、淡水舱、燃油舱、滑油舱、污水舱、污油舱等多个不同类型的液体舱室。考虑平台压载、调平、补给等多种作业的需求,平台作业人员需要实时了解每个液体舱室的液位,设置液位遥测系统对每个液体舱室的液位进行检测;对检测的数据进行处理和计算后,将结果在液位显示单元进行显示;然后平台作业人员根据各舱室的液位信息及平台的作业需要,对相关系统的阀门及泵组进行自动或手动控制,实现对平台的管理、调平以及配载等作业,保证海洋平台的安全及提高管理效率。本文主要阐述了海洋平台液位遥测系统的种类、选型以及安装方面的建议,为后期项目的设计和安装提供参考。
2 液位遥测系统的组成
液位遥测系统是海洋平台上监控系统中的重要组成部分,它既能大大提高平台作业人员的便利性,又直接关系到海洋平台在漂浮、压载及作业期间的安全。
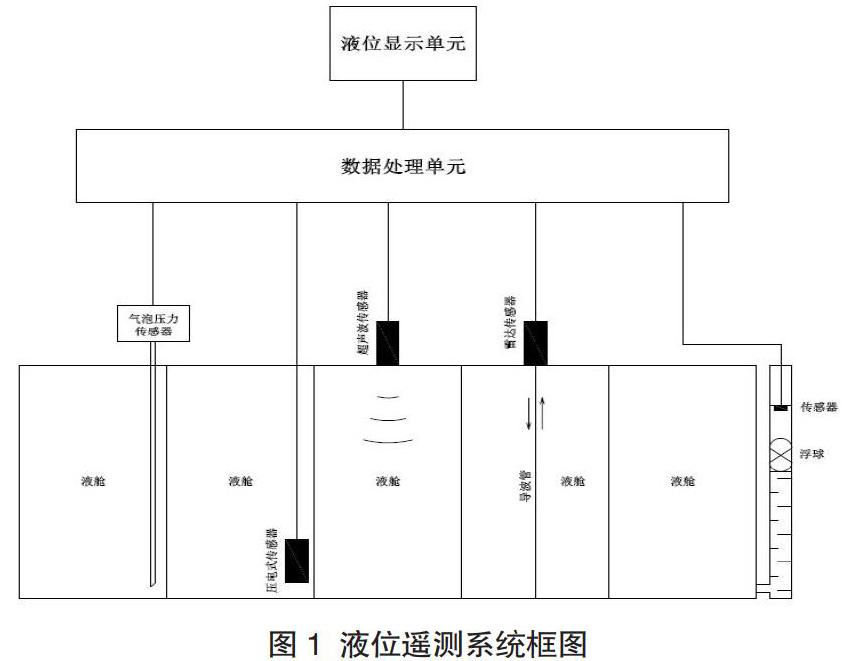
海洋平台液位遥测系统,主要包括液位信息采集单元、数据处理单元以及液位显示及操作单元:液位信息采集单元,监测海洋平台的液体舱室的液位信息,将信息转换成可识别的信号上传给数据处理单元;数据处理单元进一步对液位信息进行数据分析和计算处理;然后将各舱室正确的液位信息数值,送至显示单元进行显示。液位遥测系统框图,如图1所示。
2.1 液位信息采集单元
液位信息采集单元的传感器分布在每个需要液位监测的液体舱室,传感器对采集的液位信息进行分析处理后转换为4~20 mA的模拟量信号。
液位信息采集单元根据液位信息采集原理的不同,可分为以下几类:气泡式;压电式;浮子式;雷达式;超声波式等。
2.1.1 吹泡式采集单元
气泡式采集单元是以压缩空气作为测量介质,通过气压调节装置经测深管将一定压力和流量的压缩空气送至被测液体舱室内接近舱底的位置;当压缩空气的气压与测深管出气位置液体介质的静压力相平衡后,多余的气压从测深管的底端以气泡的形式溢出,测深管内的平衡气压即为液体介质在测深管底端的静压力。该压力与液体舱室内液位的深度成正比,可通过设置在气体阀箱内的压力传感器实时测量。按公式H=P/(ρg),根據传感器测得的压力参数即可获得液位深度的准确数据。
这种测量方式的好处是压力传感器的感压膜片不与被测液体直接接触,减少了被测液体或海生物对传感器的影响,同时不受液体舱室内不同结构形式及附件的干扰。气泡式液位遥测系统原理图,如图2所示。
2.1.2 压电式采集单元
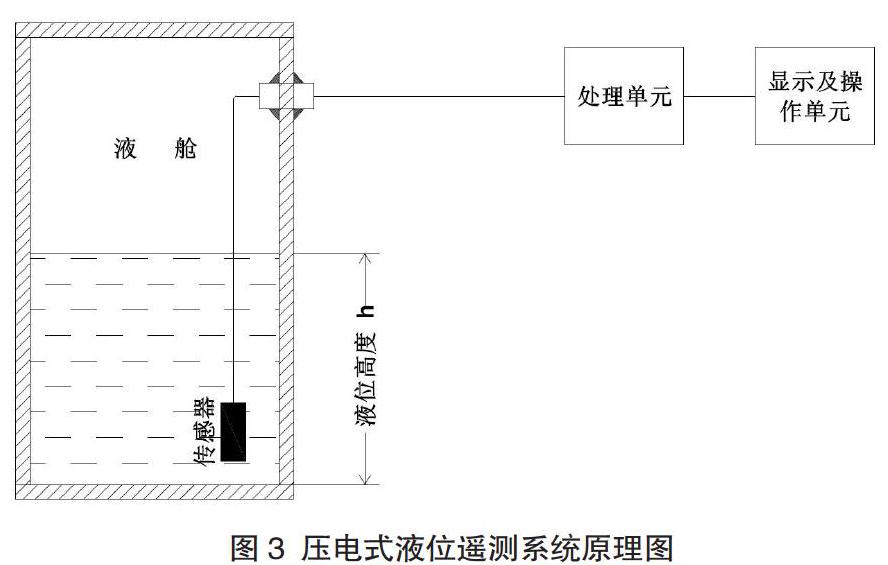
压电式采集单元不同于气泡式采集单元,它是将压力传感器直接设置在液体舱室的底部,能够实时测量出液体舱室底部液体的静压力。同样,该压力与液体舱室内液位的深度成正比,按公式H=P/(ρg),根据传感器测得的压力参数即可获得液位深度的准确数据。
这种测量方式相比于气泡式采集单元,减少了压缩空气系统相关配件,系统简单,也避免了气体对液体舱室内液体造成污染的可能,测量方式也不受液体舱室内不同结构形式及附件的干扰。压电式液位遥测系统原理图,如图3所示。
2.1.3 浮子式采集单元
浮子式采集单元,根据浮子所带触发器件的不同可分为两种类型:一种是在浮子端部和微动组件上安装一对极性相斥的磁钢,浮子安装在与液体舱室连通的腔体内,当浮子在动作界限内随液位变化上下升降时,其所带磁钢也随之上下浮动,并带动微动组件上的磁钢运动,微动组件位置的变化作为液位高度的判断条件并能在显示单元上进行显示。浮子式(磁钢)液位遥测系统原理图,如图4所示;另一种是在浮子端部安装光敏器件,在动作界限内装有光栅单元和微动开关组件,当浮子在动作界限内随液位变化上下升降时,浮子端部的光敏器件也随之上下摆动,当光敏器件通过光栅单元时,光栅单元产生信号,通过光栅单元信号的变化可判定液位的高度。浮子式(光敏元件)液位遥测系统原理图,如图5所示。
2.1.4 雷达式采集单元
雷达式采集单元,按照电磁波传播方式不同可分为接触式和非接触式两种。两者的区别主要是非接触式的电磁波沿空气传播,而接触式的电磁波是沿着一根导波管传播以消除雷达波束角。
雷达式采集单元的工作原理,是在液面上方(通常安装在液体舱室的顶板上)安装电磁波探头(包括发射和接收两个部分),发射模块向液面方向发出电磁波,由于液体的介电常数与空气的节点常数不同,当电磁波到达液面时会发生反射,被反射回去的部分电磁波被接收模块接收,通过测出电磁波发出和接收的时间差计算出液面到探头的距离,进而推算出液体舱室内液体的深度;雷达式采集单元的优点,主要是安装简单、精确度高、测量范围大、测量结果不受液体温度、密度、表面泡沫等参数影响、适用于大型船舶。导波雷达式液位遥测系统原理图,如图6所示。
2.1.5 超声波式采集单元
超声波采集单元的原理与雷达式采集单元的原理类似,也是由安装在液面上方(通常安装在液体舱室的顶板上)的超声波探头(包括发射和接收两个部分)向液面方向发出超声波,当超声波到达不同介电常数的液面时发生部分反射并被接收模块接收,通过测量的超声波从发出到接收的时间差可计算出液面到探头的距离,然后再根据探头到舱室底部的高度即可推算出液体舱室内液体的深度;超声波采集单元兼具雷达式采集单元的优势,但由于超声波的传输需要借助于传输媒介(多为空气),所以不适用于真空环境。超声波式液位遥测系统原理图,如图7所示。
2.2 数据处理单元
数据处理单元控制柜通常布置在控制室内,主要包括电源模块、控制器、输入输出模块、通讯模块等。数据处理单元的作用,主要是根据显示及操作单元的指令对各个液体舱室的传感器信号进行扫描,然后对信号采集单元输送过来的4~20 mA信号进行数据分析和计算处理后返回给显示及处理单元;数据处理单元也可以根据采集的数据信号对传感器进行自检,判断送入显示及操作单元的信號是否有效,如发现信号存在异常及时发出报警信号,确保系统运行正常及海洋平台的安全。
2.3 液位显示及操作单元
液位显示及操作单元通常布置在控制室内,方便值班人员及操作人员实时查看各个液体舱室的液位。液位显示及操作单元可以简单的理解为一台计算机,包括电脑主机、显示器(触摸屏)、键盘、鼠标等,作为液位遥测系统的显示终端,在显示屏上可以实时显示各个液体舱室的液位、重量、体积等参数。当任一个液体舱室的液位参数超出预先设定的报警值时立即发出报警信号,同时也可以通过键盘及鼠标等对液位采集单元的传感器进行标定,以及对系统参数进行重新设定等。
3 液位遥测系统传感器选择和安装
海洋平台液位遥测系统根据采集原理,存在多个不同的采集方式。每种方式的传感器都具有自身的特点和与之相适应的应用场所。为了尽量准确的测量液位信息,传感器在安装过程中需要注意下面一些问题:
(1)传感器应能在特定的环境下稳定地工作,其量程范围、灵敏度、精确度应与被测量液位参数的变化范围及使用要求相适应;
(2)传感器应与安装位置的环境参数相适应,传感器本身应具有良好的机械保护、可靠的电气连接和良好的绝缘性能,特殊位置可考虑单独设置机械保护;
(3)液位遥测系统的传感器或吹气管出口的位置,应尽量接近于液体舱室的舱底和中心位置,以便正确反映出被测液体舱室的液位;传感器的安装应易于接近、测试和维护;传感器或吹气管的位置,也应尽量靠近手动测深管,避免在传感器校准时由于两者位置偏差造成误导;
(4)淡水舱内为生活用水,如采用气泡式液位遥测系统在吹入压缩空气过程中可能会对生活用水造成污染,所以建议采用压电式等其它类型的传感器;
(5)对于气泡式液位遥测系统,当某些深舱的最高液位可能高于吹气管进入液体舱室的穿舱件高度时,应在吹气管上设置单向阀,避免由于压力差使得液体舱室内液体倒流造成气源装置损坏;
(6)压电式传感器应设置在液体舱室的底部,传感器电缆处于液体舱室内的部分应穿管或其它机械保护,电缆管内壁须光滑并且耐腐蚀;如果传感器布置在液体舱室的中心,通常将电缆保护管固定在舱壁上延伸到舱室底部后再通过水平电缆保护管延伸到舱室中心;
(7)如果使用过程中需要实际测得液体的密度,则应在液体舱室内设置高低两个传感器,底部传感器用来测量液位高度,当舱内液位达到上部传感器后通过上部和底部传感器测得数据可计算出液体实际的密度;
(8)雷达式液位传感器的安装位置,应避免探头所发出雷达波的扇形面被舱内结构附件遮挡后造成干扰;对于一些舱内设置有加热盘管、搅拌器等设备的液体舱室,为了在液位测量过程不受加热盘管、搅拌器等设备的影响,建议采用导波雷达的形式,导波管的位置尽量布置在舱室的中心;
(9)雷达式液位传感器和超声波液位传感器,通常是布置在甲板面上,要求在设计和安装过程中传感器的防护防爆等级与安装处所相适应;传感器的位置应尽量躲开逃生路线、活动设备等区域;
(10)海洋平台作业及航行期间,由于多种原因使得船体不能时刻处于水平状态,而且很多舱室由于结构支撑、管线等其它结构物的影响使得液位传感器也很难布置在液体舱室的中心,导致在平台倾斜状态下液位传感器测得的液位并不能真实反应出液体舱室的液位,所以需要在平台上设置四角或三角吃水测量系统,可测得平台的倾斜角度,通过平台的倾斜角度等参数对液位信息进行修正后,可获得液体舱室的准确液位高度。
4 总结
本文介绍了海洋平台上的液位遥测系统,对海洋平台上液位遥测系统的种类、选型以及安装过程,提出了几点建议。希望本文中能对海洋平台液位遥测系统的设计和安装提供参考,以便设计人员选择适合的传感器对液体舱室的液位进行准确的监测,保证海洋平台安全可靠的运行。
参考文献
[1] 海洋石油工程设计指南编委会. 海洋石油工程FPSO与单点系泊 系统设计[M]. 北京:石油工业出版社. 2009.
[2] 中国国家标准化管理委员会. 船用液位遥测系统 GB/T 37555. 2019. [S].
[3] 朱万林 叶青松 邓锐. 自升式钻井船液位遥测系统设计[J]. 化学工程与 装备. 2010 ( 6 ).
