关于角位移传感器研制过程中关键技术的思考与分析
2020-03-24王尊敬彭春增王天资
王尊敬 彭春增 王天资

摘 要:随着飞机上机械传动系统越来越多地被电控系统所取代,旋转可变差动变压器式角位移传感器(RVDT)在飞机系统中的应用越来越广泛。文章对角位移传感器研制过程中的关键技术进行梳理,分析了其研制难点,并结合实际提出了后续的相应解决措施和改进方向。
关键词:角位移传感器;RVDT;关键技术;解决措施
中图分类号:TP212 文献标志码:A 文章编号:2095-2945(2020)09-0160-03
Abstract: As more and more mechanical transmission system is replaced by electronic control system, the RVDT is widely used in the aircraft system. In this paper, the key technologies in the development of RVDT are sorted out, the solution measures and the improvement direction are raised with practice.
Keywords: angular displacement sensor; RVDT; key technology; countermeasure
旋转可变差动变压器式角位移传感器(RVDT, Rotary Variable Differential Transformer)主要用于测量飞机舵面位置、驾驶舱指令、发动机进油活门位置、电磁阀开度等,为飞行控制系统提供了精确的角度位置信息,在飞机系统中的应用越来越广泛[1-4]。当前,RVDT角位移传感器在国外已相对成熟并得到较为广泛地应用。在国内,从事该类传感器研制和生产的单位主要有航空工业自控所、北京曙光航空电气有限公司、陕西东方航空仪表有限责任公司等。但由于该传感器属于高精密傳感器,技术复杂程度较高,生产、装配及调试难度较大,国内市面上的成熟产品尤其是耐温在200℃以上的产品依然较少。本文根据作者近几年对该类传感器研制经验梳理了其关键技术并分析其研制难点,结合实际提出了后续的相应解决措施和改进方向,对于指导后续传感器的性能提升和改进具有重要意义。
1 角位移传感器工作原理
旋转可变差动变压器式角位移传感器属于互感式传感器,由定子组件和转子组件组成。其中,定子组件包括定子铁芯和绕组两部分,定子铁芯一般由导磁性能良好的软磁材料冲片叠成,其圆周上均匀分布4个凸极。凸极上嵌有4个激磁线圈(S1-S2)和4个输出线圈(分两组,S3-S4,S5-S6)。当转子转动时,磁阻的变化将引起凸极上4个输出线圈中的感生电动势发生变化。两组输出线圈产生的VA、VB电压值为此消彼长关系,二者的差值(差动电压VA-VB)与转子的转角呈线性关系,从而实现角度测量,传感器原理图如图1所示。
2 传感器结构组成
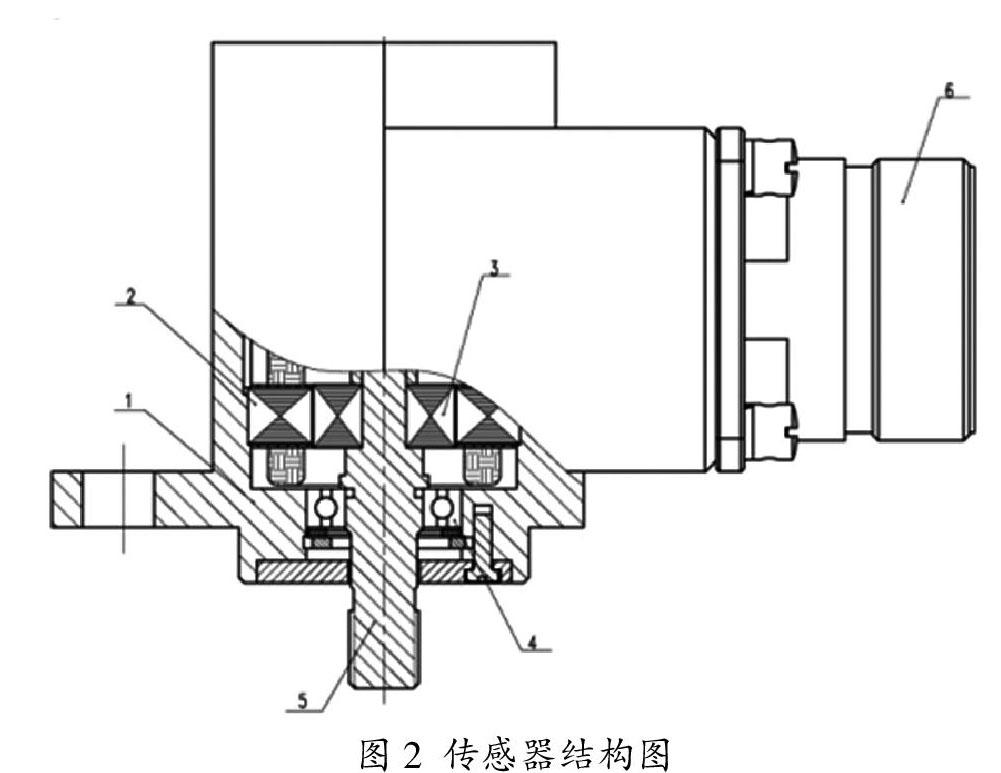
传感器主要由防护壳-1、定子组件-2、转子铁芯-3、轴承-4、转轴-5和插座-6等零部件组成,如图2所示。其中,定子组件和转子铁芯是其关键核心部分。
3 关键技术及解决途径
3.1 定子、转子关键尺寸确定
3.1.1 关键技术问题
其中,f为激励频率;N1为激励线圈匝数;N2为感应线圈匝数;μ0为真空磁导率;r为转子最大半径;h为定子有效厚度;δ为定子、转子极间气隙长度;α为转子的角位移。由式(1)和式(2)可知,δ、r和h直接影响到感和K,δ与感和K成反比。定子槽口宽度d直接影响传感器线性测量范围,d越小,线性测量范围越大。定子窗口尺寸S则影响线圈的绕制匝数进而间接影响传感器性能。通常,优异性能的传感器通常需要具有较高的感和K,同时具有良好的线性输出。
3.1.2 原因分析及改进措施
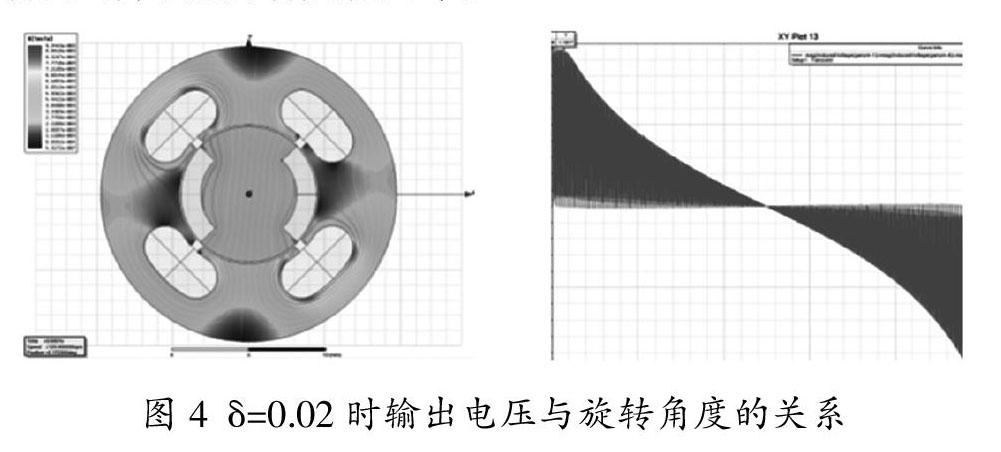
为了增大传感器的感和K并保证良好的线性输出范围,可通过减小δ、d,增大r、h和S等方式实现。然而,减小δ会导致转子组合难以穿过定子绕组,对零部件加工精度要求也同步提高,装配形位公差较小,另外,由仿真分析结果(图4为δ=0.02时输出电压与旋转角度之间的关系曲线)可知,δ过小会导致输出曲线发生畸变,不再是线性输出;而增大r、h和S会导致定子绕组体积增大或转轴长度增加,加工困难较大;减小d会导致绕制激磁绕组以及感应绕组时,线圈难以穿越狭窄的槽口,绕制困难,且为保证功能,d的大小受δ限制。因此,合理设计上述各参数尺寸,寻找其平衡点至关重要。根据目前产品研制经验,在产品设计过程中,需完善定转子的磁性能仿真分析,即在Maxwell 2D模块磁性能仿真分析的基础上进一步开展Maxwell 3D模块仿真,以更全面地了解在某一具体定转子模型下其磁场的分布情况及传感器的输出特性,最终确定定子、转子叠片各关键尺寸。
3.2 定子、转子铁芯的制备
3.2.1 关键技术问题
定子、转子铁芯(由多片定、转子叠片喷胶后叠压而成)在制备过程中易存在叠装不易对齐和内外圆磨时开裂等问题,增加了产品的报废率,难以保证产品质量。对于前者,通过制备定转子专用叠装工装找到有效定位点和限位点,基本可实现定、转子叠片叠装的整齐性;而对于后者,目前仍是传感器研制过程中的棘手问题。
3.2.2 原因分析及改进措施
经过分析,产生定、转子叠片内外圆磨时开裂的主要原因有:(1)定、转子叠片叠装压力控制不合理;(2)选用的粘结剂不能完全适用于薄片粘结同时兼顾200℃以上高温应用;(3)为保证定、转子铁芯的整齐度,叠装工装对定、转子叠片过定位导致内应力增大;(4)内外圆精磨磨削量有时较大,增大了开胶概率。针对上述原因分析,后续可从以下几方面采取解决措施:
(1)叠装压力优化选择:叠片叠装时可采用扭力扳手进行锁紧,对扭力进行量化,确保每个铁芯的叠压压力一致。扭力大小可通过对不同扭力下的磁性能测量以及该扭力下叠片的结合强度两方面进行综合评估,寻找平衡点,确定最佳值。
(2)粘结剂的优化选用:当前,尚无完全适用于薄片粘结且使用温度超过200℃的高温粘结剂,为尽可能降低由于粘结剂造成的影响,可在保证胶水涂层绝缘性能前提下尽量减薄高温粘结剂喷涂厚度,或考虑采用喷涂氧化镁溶液实现叠片之间绝缘,通过焊接实现叠片间粘结的方式。
(3)内应力释放:结合叠装工装合理制定工艺操作步骤和装配顺序,将过定位器件在装炉脱火前去除,以释放内应力。
(4)减少磨削量:尽量减少磨削加工量,内圆精磨时单次进给量<0.01mm,在磨削过程中实时喷射冷却液,防止干磨过热导致胶开裂,砂轮宜采用颗粒度小的白刚玉砂轮。
3.3 温漂的控制
3.3.1 关键技术问题
环境温度的变化会引起传感器零点温度漂移、灵敏度温度漂移以及线性度和相位的变化,造成温度误差,进而影响传感器的测量精度。因此,在传感器设计过程中应尽可能将其温漂控制在最低。
3.3.2 原因分析及改进措施
造成传感器温度误差的原因主要有:(1)环境温度的变化通过材料线性度膨胀系数引起零件尺寸的变化;(2)环境温度的变化通过材料电阻率温度系数引起线圈铜阻的变化,为传感器产生温漂的主要原因;(3)环境温度的变化通过磁性材料和线圈几何尺寸变化引起线圈电感量及寄生电容的改变。表1是传感器在不同温度(室温~170℃,最高测试到170℃)下15°位置时的输出。可以看出,两组感应线圈的输出信号均為随温度升高而减小,较室温最大降幅分别为0.0356V和0.0243V,这种不一致导致两组线圈的差动输出较室温发生0.0138V的改变,即引入了温漂。
针对上述主要原因,可以采取稳定激励电流的方法降低温度误差,即在使用稳压电源的初级回路中串联一高阻值降压电阻,使激励电流近似不变,或使用热敏电阻RT方式进行温度补偿。
3.4 零位输出电压的控制
3.4.1 关键技术问题
零位输出电压的存在使传感器输出特性在零位附近不灵敏,也不利于测量并带来测量误差。因此,在传感器设计过程中,应尽可能减小零位电压输出。
3.4.2 原因分析及改进措施
零位电压无法完全消除,只能通过采取有效措施降低零位电压值,使其控制在误差范围之内,减小对传感器输出精度的影响。产生零位电压输出的原因主要有:(1)实际绕线中感应绕组的电气参数和几何尺寸不对称,导磁材料存在铁损耗和不均质,激磁绕组有铜损耗电阻,使两个输出绕组中的磁通大小不等、相位不同,造成与输入信号不同相位的零位电压;(2)由于所用磁性材料磁化曲线存在
非线性(磁饱和磁滞),当磁路工作在非线性段时,会造成输出波形的失真,产生高次谐波分量。(3)由于线圈具有寄生电容,线圈与外壳、铁心间有分布电容,导致输出电压产生正交分量。
为了减小传感器的零位输出电压,可以考虑采取以下措施:(1)尽可能保证传感器几何尺寸、线圈电气参数和磁路的对称,提高定子、转子等重要零件的加工精度,输出绕组绕法完全一致;(2)磁性材料须经过适当的处理,消除内部残余应力并使其磁性能均匀、稳定,例如采用定子叠片每片晶粒取向相错15°的方法来保证定子铁芯磁场的均匀分布,如图5;(3)选用导磁性能好的材料作为保护外壳,同时起到磁屏蔽的作用,以减小外界电磁场的干扰;(4)控制磁性材料的最大工作磁感应强度,使磁路工作在磁化曲线的线性段,减小高次谐波。
图5 定子叠片晶粒取向相错15°的加工流程示意图
4 结束语
本文结合近年来对角位移传感器的研制经验,分别从定子、转子关键尺寸确定,定子、转子铁芯的制备,温漂的控制和零位输出电压的控制四方面进行关键技术梳理,分析了其研制难点,并结合实际提出了后续的相应解决措施和改进方向,对于后续传感器的性能提升和改进具有重要意义。
参考文献:
[1]薛瀛.论电子调整在飞控系统RVDT精度控制的应用[J].机械设计与研究,2015,31(4):102-105.
[2]冯铭瑜,王蓬.飞机脚蹬位移测试校准方法研究[J].应用天地,2018,37(6):151-154.
[3]孙冲,邓海侠.某型机电传飞控系统位移传感器总体布置设计[J].直升机技术,2018(3):47-50.
[4]尚洁,包艳,杨楠,等.差动变压器式角位移传感器线性测量范围与结构关系的研究[J].现代电子技术,2015,38(12):394-398.
