基于STM32的电梯导轨机器人控制系统设计
2020-03-23李大琳何鑫陈涛
李大琳 何鑫 陈涛

摘 要:文章实现了一种基于STM32单片机的高精度电梯导轨机器人控制系统。为保证系统安全,系统采用“自主+人工”的混合控制策略。根据工业现场及项目的实际需要,该控制系统以STM32F104为控制核心,采用基于事件的实时系统设计思想,可以为机器人同时提供4路PWM电机控制信号输出,4路数字控制信号输出,10路数字传感器输入,1路AD输入以及1个最高波特率为115 200 bps的全双工RS485高速串行通信端口,并且可以根据电梯井的实际情况选配无线通信模块。该控制系统能够满足30层以下建筑的各型电梯的巡检、清理和日常维护需要。
关键词:STM32;电梯导轨;机器人;控制系统
1 电梯使用与维修
随着我国高层建筑物的不断增加,电梯的使用越来越广泛。目前,电梯的使用有两个突出特征:一是高层建筑增多,导致电梯工作行程增加,对电梯导轨的整体垂直度保证要求提高;二是随着住宅小区的建设,电梯布置的密度增加,有些小区一栋建筑之内就有3部电梯,导致电梯日常维护的强度增加。因此,如何保证电梯导轨维护工作效率,降低电梯导轨维护工作强度,保证电梯导轨维护质量,成为在电梯的设计和使用过程中非常重要的问题。
目前业界有一些商用的电梯导轨巡检和维护机器人产品[1],我国国内高校也提出了相关设计方案[2]。本文根据所在项目的实际需要,提出了基于以ARM-M3为核心的STM32单片机为控制器的电梯导轨机器人控制系统。该系统可以满足电梯导轨巡检、清理和日常维护工作的控制需要,在性能和成本上取得平衡,是一种既能保证电梯导轨维护质量,又具有商业推广价值的方案。
2 电梯导轨机器人
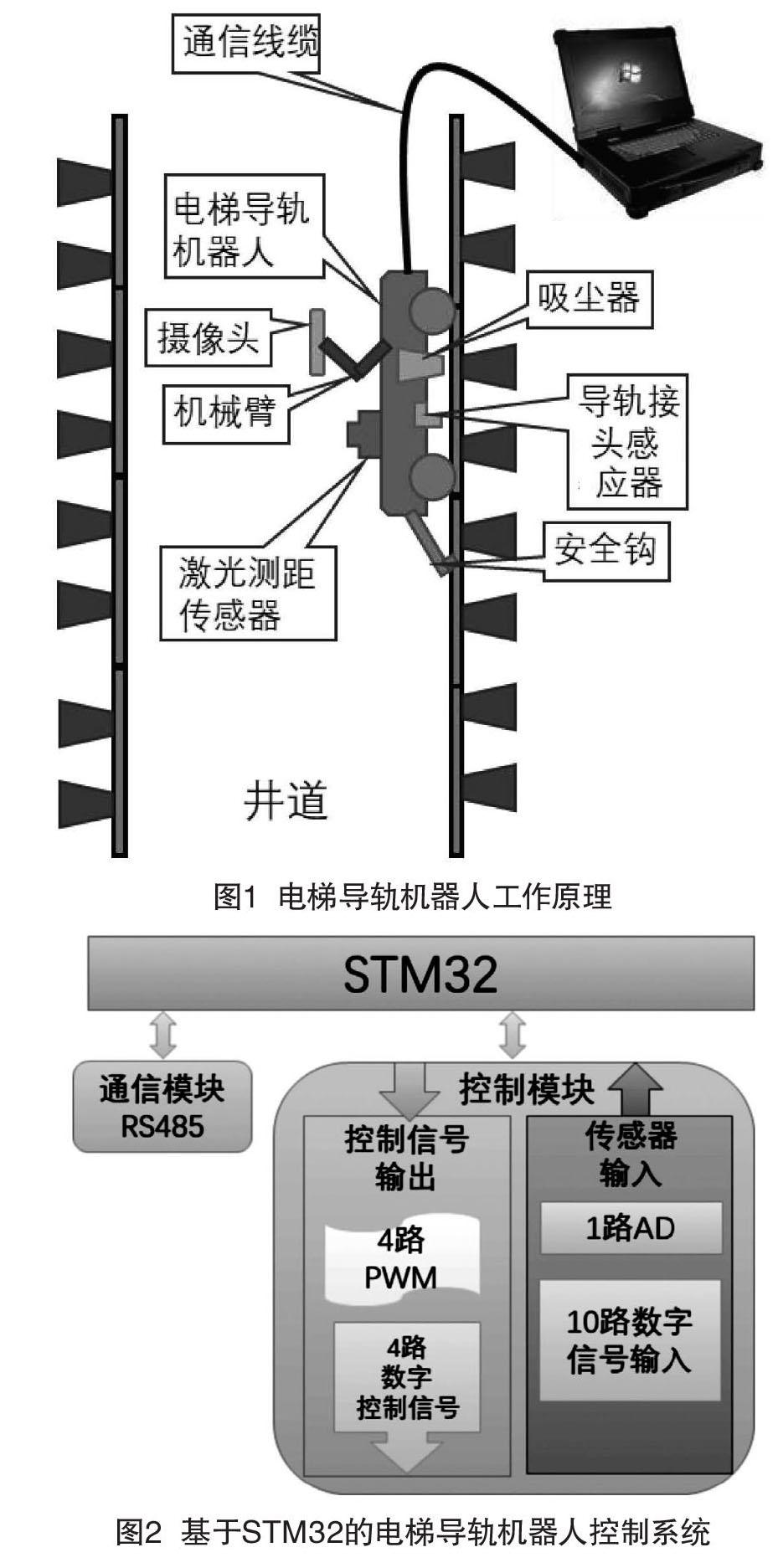
电梯导轨机器人的工作原理如图1所示。机器人通过“磁轮+胶轮+安全钩锁”的方式吸附于电梯导轨,能够同时保证吸附力、接触误差和安全定位,同时按照指令驱动电机带动机器人在导轨上运动,并且控制各项传感器和执行器完成导轨的数据采集和简单清理维护工作。本文所设计的机器人采用“自主+人工”的混合控制策略,机器人根据预设程序以及传感器的输入自主完成数据采集,并把数据通过串口传给上位机。同时,机器人还能够根据工作人员的指令,对导轨进行简单维护(灰尘清理、紧固件状态检查)。
3 基于STM32的电梯导轨机器人控制系统设计
3.1 控制系统总体设计
电梯导轨机器人的控制系统主要由控制模块和通信模块两大部分组成,如图2所示。其中,控制模块又分为传感器输入、控制信号输出两部分,分别完成数据采集和机器人运动控制和导轨维护执行器控制。通信模块主要是RS485串行通信,该协议通信距离为1 200 m,最高通信速率为10 Mb/s,完全可以满足电梯维护工作需要。如果需要加装摄像头进行视频检测,由于视频传输的高码率需要,系统需要为摄像头配置专门的信号传输线路。
3.2 控制系统主要功能子系统设计
3.2.1 动力子系统设计
由于本文涉及的机器人使用的是瑞士产Maxon空心杯直流电机,可以提供21 Nm的扭矩,所以直接使用系统输出的PWM信号驱动电机控制器来进行电机控制。另外,结合STM32的高精度PWM信号输出,可以为电机提供精度为0.1°的控制信号,同时为电机加装编码盘,可以实现闭环控制,进一步提高精度。
3.2.2 執行器控制子系统设计
用1路PWM信号驱动吸尘器电机,实现轨道清洁;2路PWM信号驱动机械臂电机,实现360°视频拍摄。
3.2.3 数据采集子系统设计
采用激光测距传感器测量导轨间距,以保证导轨的相对垂直度;用导轨接头感应器判断导轨接头凸起,以保证电梯的平稳工作。系统首先将采集数据缓存在STM32的Flash存储器中,然后通过笔者设计的基于RS485和重传的安全数据通信协议,将数据发给上位机并完成测量结果相关计算[3]。并且,系统为业界通用的高精度传感器(二维位置敏感探测器[4])预留了1路AD接口,可以通过串口发送命令进行功能激活。由于二维位置敏感探测器成本较高,一般只在导轨垂直精度校正时使用。
3.2.4 供电子系统设计
由于动力轮、吸尘器电机以及机械臂电机总和功率相当大,本系统采用“主电源+备用电”的方案,主电源通过线缆直接为系统供电,起到一定的安全保护作用。机器人携带电池作为应急备用电源,当主电源停电后,通过备用电池提供动力,可以保证机器人自主行驶到安全位置。
4 系统测试
本系统在项目所在办公楼进行了测试,测试环境如表1所示。
实验过程中,系统运行稳定、振动小、测试精度高,但吸尘器和测试传感器不能同时工作,因为吸尘器引起系统的振动会影响精度。
5 结语
经过试验证明,本文所设计基于STM32的电梯轨道机器人控制系统能够满足所在项目需求,并且具有精度高、功耗低、稳定性好以及通用性强等特点。系统能够在性能和成本上取得平衡,是一种既能保证电梯导轨维护质量,又具有商业推广价值的方案。
[参考文献]
[1]大连拉特激光技术开发有限公司.JZC激光自动安平垂准仪购买与使用指南[Z].JZC—E10,2007.
[2]孙明.电梯导轨垂直度检测机器人设计与实现[D].上海:上海交通大学,2007.
[3]ZIQIANG Y,SHENGQI L.High accuracy error separation technique for on-machine measuring straightness[J].Precision Engineering,2006(30):192-200.
[4]Keyence公司.激光傳感器用户手册[Z].LR—W,2017.
Abstract:In this paper, a high-precision elevator guide rail robot control system based on STM32 single chip microcomputer is realized. In order to ensure the safety of the system, the hybrid control strategy of“autonomous + manual”is adopted. According to the actual needs of the industrial site and the project, the control system takes STM32F104 as the control core and adopts the design idea of event based real-time system. It can provide the robot with four PWM motor control signal outputs, 4 digital control signal outputs, 10 digital sensor inputs, one ad input, and one full duplex RS485 high-speed serial communication with the highest baud rate of 115 200 bps The wireless communication module can be selected according to the actual situation of the elevator shaft. The control system can meet the needs of inspection, cleaning and daily maintenance of all types of elevators in buildings below 30 floors.
Key words:STM32; elevator guide; robot; control system
