基于卡尔曼滤波器的索道轿厢相对定位方法及应用
2020-03-22丁洪涛
蒙 娟,丁洪涛
(1.北京劳动保障职业学院,北京 100029;2.深圳前海索士科技有限公司,广东 深圳 518052)
0 引言
客运索道是一种现代化的立体轨道交通设施,由于它安全、快捷、高效、环保,目前在我国风景区和滑雪场得到了广泛应用。随着经济的发展,人们对乘坐索道的安全性和舒适性有了更高的要求。其中,索道轿厢的实时精准定位是实现索道运营安全、乘坐舒适的必要前提。通过对索道轿厢的实时定位,人们能随时掌握轿厢的精确位置,以便发生危险时进行紧急救援;通过对索道轿厢的实时定位,索道实现定位播放音视频,旅客可以乘坐索道走到哪听到哪,旅行途中不再单调,乘坐体验感更好。因此,客运索道定位系统的研发受到索道行业的普遍关注。
而客运索道多是建造在奇山异水、崇山峻岭之处,地理环境复杂恶劣,卫星信号容易受到森林、高山的遮挡,出现信号不连续、不稳定,定位精度不高等现象,造成索道轿厢位置定位不够精准,同时,索道轿厢运行速度慢,且轿厢之间间距较小,加大了轿厢定位精准的难度。本文提出一种基于卡尔曼滤波器的GPS相对定位新算法用于解决这些问题。
1 索道轿厢相对定位原理
1.1 基于GPS的索道轿厢相对定位
GPS是一种无线电导航定位系统,它利用导航卫星进行测时和测距,确定用户在空间特定坐标系中的位置。GPS定位分为单点定位和相对定位。GPS相对定位也叫差分定位,是目前GPS测量中定位精度最高的定位方法,它被广泛应用于大地测量、精密工程测量、地球动力学的研究及精密导航中[1]。
索道轿厢相对定位就是设置一个固定位置即坐标精确已知的基站(通常为索道站房),通过测定索道每个轿厢与基站之间的Δx、Δy、Δz坐标分量,从而计算出每个轿厢的精确坐标。同时,根据轿厢相对定位随时间的变化,结合索道线路的基本方位和走向信息,分别计算出索道多个轿厢的运行方向,为索道控制系统提供精确的轿厢定位信息[2]。索道系统包含轿厢和站房,适合采用差分定位技术进行索道轿厢的相对定位。
1.2 索道轿厢位移测量方法
索道轿厢相对定位的输出结果是经纬度,而数据处理时需要的是索道轿厢实际位移,因此需要将经纬度换算成位移。把半径为R的地球置于直角坐标系中,球心位于坐标原点,赤道L所在平面与坐标X、Y构成的平面重合,将经纬度换算成位移示意图如图1所示。(注:地球实际为椭球体,长半径为6 378 137.07 m,短半径为6 356 752.48m[3],若将地球看成球体,误差为千分之三,对项目影响非常小,因此本文将地球看成球体进行计算。)

图1 将经纬度换算成位移示意图
地球表面有一点P,坐标为(x,y,z),设α、β分别是经度和纬度,显然有:


若P点移动一段位移ds,则:

对式(5)~式(7)求平方得:
将式(8)~式(10)代入式(4)得:

可见位移ds被分解成沿东西方向的分量Rcosβdα和沿南北方向的分量Rdβ。
2 基于卡尔曼滤波器的索道轿厢相对定位
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于它便于计算机编程实现,并能够对现场采集的数据进行实时的更新和处理,因此,卡尔曼滤波在通信、导航、制导与控制等多领域得到了广泛的应用[4]。卡尔曼滤波器要求建立数学模型来描述系统,所建立的数学模型与系统的真实模型越匹配,则滤波器输出的最优估计值越接近于真实值。
为了方便乘客上下,使乘客获得更好的乘坐体验感,一般客运索道的行驶速度不会太高且运行平稳,大多数索道站内速度不高于1m/s,站外速度不高于10 m/s。而GPS采样周期很短,因此我们可以将索道轿厢的运动看作是匀速运动,并以此来建立数学模型。
首先我们要利用系统的过程模型,来预测下一状态的系统。设轿厢与站房之间的距离状态量为S,建立的状态方程如下:

其中:S(n)为在n时刻索道轿厢与站房之间的距离;T为采样周期;U(n)为系统激励输入向量;w(n)~N(0,Q)为过程噪声。
设轿厢与站房之间的距离实际测量值为Zg,建立的观测方程如下:

其中:Zg(n)为在n时刻的系统测量结果,由1.2中通过GPS定位采集的计算式(11)导出;H(n)为测量系统参数,此处 H(n)=I,I为单位矩阵;v(n)~N(0,R1)为测量噪声。
根据上述的状态方程和观测方程建立卡尔曼滤波器。
2.1 预测
(1)预测值。设S(n|n-1)为卡尔曼滤波器在n时刻的预测值,则:

其中:S(n-1|n-1)为n-1时刻系统的最终优化状态值。系统激励输入向量U(n)推导过程如公式(15)所示:

其中:Ku为U(n)的卡尔曼误差增益。
(2)预测方差矩阵。设P(n|n-1)为系统预测方差,则:

其中:P(n-1|n-1)为上一时刻的系统修正方差;Q为过程噪声高斯分布尺度参数。
2.2 修正
(1)误差增益。设Ks为S(n)的卡尔曼误差增益,则:

其中:R为测量噪声高斯分布尺度参数。
(2)修正值。设S(n|n)为系统在n时刻的最终优化状态值,也就是卡尔曼滤波器的系统输出值,即滤波结果,则有:
S(n|n)=S(n|n-1)+Ks(n)[Zg(n)-S(n|n-1)].(18)
(3)测量值。测量值Zg(n)的值由索道轿厢的位移测量方法得出,详见1.2中公式(11)的推导,即:

(4)修正方差矩阵。设P(n|n)为系统修正方差,则:

至此,已经完成整个系统的递推计算。卡尔曼滤波器的输入为GPS定位模块采集的经纬度,即α、β,通过对其进行转换可得索道轿厢相对索道站房的实测距离,经过上述递推演算,最终获得系统滤波结果S(n|n)。
3 实验结果及分析
采用本文所研究的基于卡尔曼滤波器的索道轿厢相对定位方法,对深圳市东部华侨城景区索道开展实验。由于天气、环境、索道运行速度等因素都会对轿厢位置的测量造成影响,因此通过设置特定滤波系数、修正值和不确定系数后,获取索道轿厢位置在滤波前、后的试验结果,如表1所示。表1中,滤波前的值为测量值,即Zg(n),滤波后的值为滤波器输出值,即S(n|n)。
滤波前、后的索道轿厢时间—位移曲线如图2所示。由图2可以看出,滤波后轿厢位移均匀有序,符合索道正常运行特征。
4 结论
本文针对索道行业中索道轿厢在线路上的定位问题,结合GPS定位的特点,计算出各个轿厢以索道站房为坐标原点的相对定位,通过卡尔曼滤波器对相对定位的东西分量和南北分量分别滤波,同时考虑到索道走向对滤波系数的影响,为不同走向的索道研制出一套相对定位的通用算法,既满足了定位精准度,又保证了数据的实时性。其结果符合索道的运营要求,已经成功应用于索道行业,为国内多条索道的运营提供了帮助。

表1 索道轿厢位移在滤波前、后数据对比
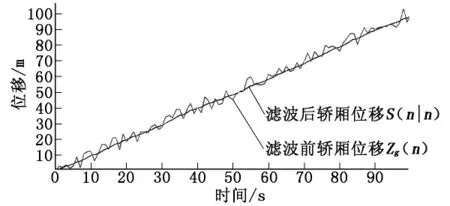
图2 滤波前、后索道轿厢时间—位移曲线
