基于FBG 的行星齿轮箱内齿圈齿根应变动态检测方法研究*
2020-03-22杨隆庆孙文磊安鹏程
杨隆庆,何 丽,孙文磊,安鹏程
(新疆大学 机械工程学院,新疆 乌鲁木齐 830046)
0 引言
行星齿轮箱具有体积小、传动效率高、承载能力强等特点,因而被广泛应用于各类机械设备中[1-2]。行星齿轮箱处于低速重载的工作环境中,发生故障的概率较高,因此,为提高机械设备的运行效率,降低维护工作量,开展对行星齿轮箱运行状态的监测是十分必要的。
行星齿轮箱运行过程中,既有各齿轮的自转,同时还有行星轮随行星架的公转,运行状态比较复杂,这就造成了以加速度信号作为载体来反映行星齿轮箱的运行状态存在一定困难。近些年来,针对光纤光栅传感器(FBG)的研究取得了突飞猛进的发展,因其具有结构简单、体积小、稳定性好、抗干扰能力强等特点,应用场合正在不断被扩展[3-4]。在行星齿轮箱内部,内齿圈处于固定不动的状态,因此十分适合布置传感器,同时齿根应变直接或间接反映行星齿轮箱内部各齿轮的啮合状态,故本文采用FBG对行星齿轮箱内齿圈齿根应变进行检测,进而监测行星齿轮箱运行状态。
1 FBG传感模型的建立
光纤光栅传感器(FBG)属于波长调制型非线性作用的光纤传感器,通过光刻技术,在普通光纤上加工栅格周期为Λ的光栅。从光源发出的宽带入射光经过光栅区域时,特定波长的光会被反射,根据光纤耦合理论[5-6],FBG传感器反射光波长λB的计算公式为:
λB=2neffΛ . (1)
其中:neff为光纤纤芯材料的有效折射率。
当FBG传感器受到外界力的作用时,光纤则会产生拉伸或压缩变形,导致栅格周期发生变化,进而导致反射光波长发生变化,形成波长漂移,记做ΔλB。根据耦合理论,FBG的轴向应变与波长漂移量成正比关系。因此,通过解调模块监测FBG传感器的反射光波长,即可反演推算得到FBG的轴向应变量,进而得到行星齿轮箱内齿圈齿根应变。FBG的轴向应变εz与波长漂移量的关系为:
2 FBG传感器布设方案设计
根据FBG传感理论模型可知,其只能检测轴向应变,因此需要对内齿圈齿根应变敏感区域进行分析,使得FBG传感器位于应变最大区域。利用ANSYS Workbench软件对轮齿进行接触受力分析,将内齿圈完全约束,对行星齿轮施加扭矩并提取应变结果。由分析结果可知,齿根应变主要集中于沿齿宽方向两侧齿根圆角处以及沿周向齿槽根部,如图1所示。考虑实验台齿轮的模数为1mm,其顶隙为0.25mm,而实验用的FBG直径约为0.24mm,因而无法保证轮齿根部圆角位置有充分空间来安装FBG传感器。因此,在实验过程中,将FBG传感器安装于内齿圈齿槽根部,沿周向布置,如图2所示。
3 内齿圈齿根应变检测实验
3.1 实验装置
实验以SQI风力发电机传动系统实验台中行星齿轮传动部分为研究对象,其太阳轮、行星轮和内齿圈的参数如表1所示。
实验台以变频电动机为原动机,以磁粉制动器为模拟负载装置,传动系统主要包括平行轴齿轮箱和行星轮齿轮箱两部分。根据前文分析,将FBG传感器粘贴于行星齿轮箱内齿圈齿槽根部,再将传感器与光源、解调模块、数据采集模块连接,组成行星齿轮箱内齿圈齿根应变动态检测系统,如图3所示。
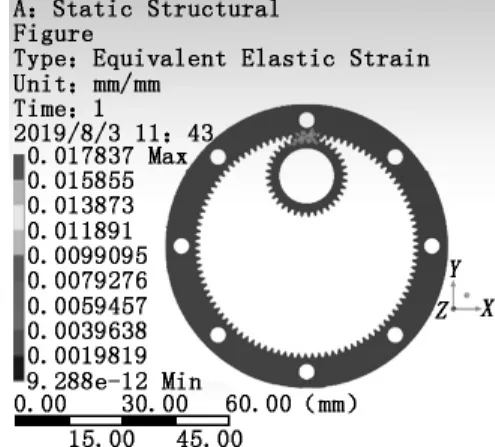
图1 行星齿轮与内齿圈啮合应变云图
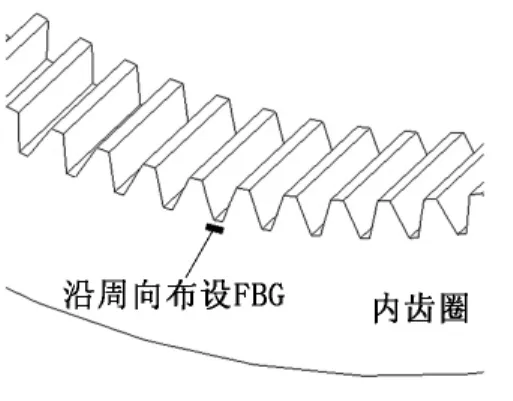
图2 FBG传感器安装位置
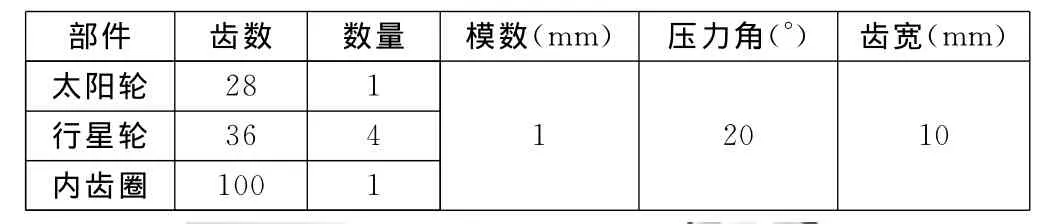
表1 行星齿轮箱结构参数
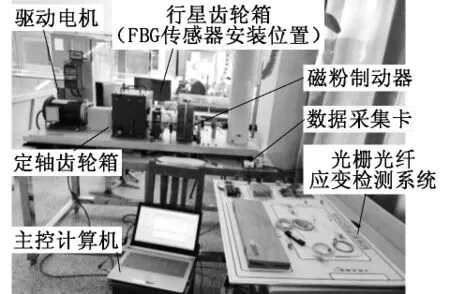
图3 齿根应变动态检测系统
3.2 实验结果分析
设置实验台驱动电机转速为450r/min,磁粉制动器分别处于17N·m、35N·m、60N·m、75N·m四种不同负载扭矩下,利用所搭建的齿根应变检测系统采集行星齿轮箱内齿圈齿根应变信号与输出轴键相信号。利用MATLAB软件对采集的电压信号进行滤波降噪,并截取稳定区域以便进行分析。
图4为驱动电机转速为450r/min、负载扭矩为75 N·m时采集的内齿圈齿根应变信号时域及频域图谱。图5为驱动电机转速为450r/min,负载扭矩分别为60 N·m、35N·m、17N·m情况下的内齿圈齿根应变信号时域图谱。由图4(a)可知,在输出轴(行星架)两个键相信号中间,可以观测到行星齿轮箱中4个行星齿轮与内齿圈固定齿啮合时产生的应变信号,在一对轮齿的完整啮合周期内,FBG传感器先后经历拉伸和压缩两个过程,造成信号图谱上出现正负电压交替的现象,每一个应变信号的波峰之间的间隔为行星架转动周期的1/4,并且由于安装误差的存在,每一个行星齿轮与固定齿啮合所产生的应变信号形态也不完全一致。由图4(b)可知,电压幅值最高的谱线为行星架转频的4倍频,这是由于行星齿轮箱内部存在4个行星齿轮,其通过频率与行星架转频耦合,形成该现象。
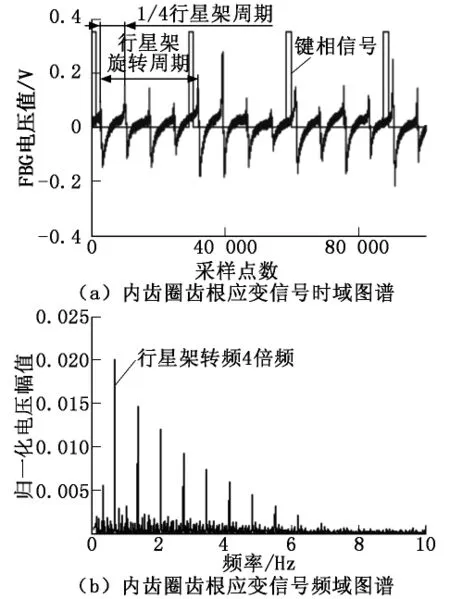
图4 电机转速为450r/min、负载扭矩为75N·m时的内齿圈齿根应变信号时域及频域图谱
由图5可知,随着负载扭矩的不断减小,行星齿轮与内齿圈相互啮合过程中所传递的啮合力逐渐减小,造成齿根应变信号的幅值不断减小,并且由于安装误差的影响,在行星架的一个旋转周期之内会出现某个行星齿轮与齿圈啮合的齿根应变信号淹没于噪声之内。
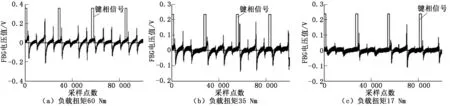
图5 驱动电机转速为450r/min不同负载扭矩情况下的内齿圈齿根应变信号时域图谱
上述现象与理论分析能够较好地吻合,说明齿根应变信号能够反映行星齿轮箱的啮合状态,对行星齿轮箱状态监测工作能够提供支撑。
4 结论
本文通过分析FBG传感器的传感模型与耦合理论,并对宽带光源、传感光路、光电转换、信号解调以及数据采集等模块进行集成,搭建了齿根应变动态检测系统。并针对行星齿轮箱的不同负载工况进行了多次实验验证与数据分析,结果证明该方法能够实现对行星齿轮箱内齿圈齿根应变动态检测,采集的数据能够与理论分析相吻合,能够为后续行星齿轮箱啮合状态监测提供参考。
