“双8”字型无碳小车的结构设计*
2020-03-22吴红静梁德湾吴华伟李海金
吴红静,梁德湾,吴华伟,李海金
(1.湖北文理学院 纯电动汽车动力系统设计与测试湖北省重点实验室,湖北 襄阳 441053;2.湖北文理学院 机械工程学院,湖北 襄阳 441053;3.湖北文理学院 汽车与交通工程学院,湖北 襄阳 441053)
0 引言
无碳小车是一种以重力势能驱动的具有方向控制的自行小车。无碳小车沿“双8”字轨迹前进时,一对后轮在转弯过程中必须使左、右轮速度不等,产生差速。如果两后轮均为主动轮,当小车在转向时两轮的运行速度相等,便会导致车身不稳,甚至是侧翻。为了解决上述差速问题,采用单轮驱动的方法[1]可以构成简单的差速器,以解决小车转弯时内、外轮线速度不等的问题,从而达到平稳转向。以往对于“8”字型小车转向机构的设计多采用槽轮机构[2]、空间RSSR机构[3]、凸轮机构[4]等。槽轮机构不利于调整小车的转角,因此必须设计完全精确时才能保证小车行驶正确的轨迹;空间RSSR机构作复杂运动和往复运动时所产生的惯性力难以平衡。第六届全国大学生工程训练综合能力竞赛要求小车需绕同一直线上的3个桩按“双8”字轨迹循环运行,因此对于轨迹的准确性和小车的设计精度要求更高。由于凸轮机构中合适的凸轮轮廓曲线能满足从动件复杂的运动规律[5],不会出现惯性力等问题,故本设计采用凸轮机构来实现小车的转向功能。通过计算确定凸轮行程及基圆半径,并借助MATLAB对小车轨迹进行优化,从而得到合适的凸轮结构。通过凸轮滑块与锁紧块带动前轮转向,使小车按正确的轨迹行走。
1 设计概述
设计一种三轮小车,在小车行进过程中由标准1kg砝码下落带动小车行进,所产生的重力势能为4J(取g=10m/s2),且砝码下降高度为400±2mm,因此小车的摩擦力以及传动时所产生的力均对小车的行驶具有很大的影响。要求小车具有转向控制机构,且具有可调节性,以适应不同场地的需求。
根据小车的设计要求,本文将小车分为四个部分进行设计,即原动机构、传动机构、转向机构与微调机构。原动机构采用绕线轮的方式,传动机构采用两级齿轮传动,转向机构采用可以实现复杂运动规律的凸轮机构,微调机构采用紧定螺钉调节凸轮滑块实现微调。
2 基本结构设计
2.1 原动机构
原动机构的作用是将重力势能转化为小车的驱动力。能实现这一功能的方案有绳轮机构和齿轮齿条,但是由于齿条需要较长空间,不容易实现,因此选用绳轮机构,可以提高效率及简洁性。绕线轮采用锥形结构,可以保证小车启动时具有一定的加速度,行走过程中重物下落平稳[6]。本设计采用弹性系数很小的尼龙线和定滑轮机构,尼龙线的一端绕在重物上,另一端固定在主动轴上的绕线轮上,使重物的重力可以转换为驱动轴上的扭矩,从而带动主动轮产生动力。为了保证小车在运行过程中能够稳定匀速前进,主动轴绕线部分的直径设计尤为重要。
利用SolidWorks对小车装配后,通过质量属性选项设定各零件材料,计算出整车重量(包含重物)m=1.76kg,滚动因擦系数σ取0.06。绕线轮的计算如表1所示。表1中,Dh为小车驱动轮直径,Dh=110mm。
2.2 传动机构
传动机构的功能是把驱动轴上的动力传递到转向机构和主动轮上,要使小车行驶得更远并按设计的轨道精确地行驶,传动机构必需传递效率高、传动平稳精确[7]。本设计采用齿轮传动,在小车行走的过程中,重物的重力势能带动绕线轮和绕线轴转动,绕线轴通过齿轮机构将动力传递给驱动轴。齿轮采用两级传动,共三个齿轮,绕线轴上的齿轮为大齿轮,过渡轮轴上为中等齿轮,后轮轴上的齿轮为小齿轮,实现了小车行驶相对更远的路程,提高了能量的利用率。

表1 绕线轮的计算
2.3 转向机构与微调机构
转向机构是小车设计的关键部分,需要尽可能地减少摩擦,并对小车转弯速度进行控制。本设计由凸轮的旋转带动转向轮左右转动从而实现小车转弯的功能[8]。转向机构与微调机构如图1所示,在小车行驶过程中,凸轮6推动与锁紧块2固定着的凸轮滑块4,锁紧块带动前轮实现左右摆动,从而实现小车的转向。此设计的凸轮转动两圈,小车行驶一个完整的“双8”。

图1 转向机构与微调机构
微调机构由凸轮滑块4、锁紧块2等零件组成。凸轮滑块4与锁紧块2之间用紧定螺钉连接,可以改变凸轮滑块伸出长度。锁紧块2与前轮支架3用螺钉螺母固定,可以任意改变支架与前轮的旋转方向。驱动轴上有螺纹,凸轮与驱动轴之间用螺母连接,当下降高度固定在400mm的时候,可以调整凸轮的初始位置。
2.4 小车运行时的角度
设主动轮与前轮的横向偏距为a,后轮轴与前轮的中心距离为d。假设前轮转过θ角度时,小车前进的距离为ds,整体转过的角度为β,则小车行驶的曲率半径为:

由公式(3)可知,小车前轮转过的角度以及后轮与前轮的距离会影响小车整体转过的角度,因而会影响小车的运动轨迹。
3 凸轮的参数设计
凸轮是具有一定曲线轮廓或凹槽的构件,它运动时,通过高副接触可以使从动件获得连续或不连续的任意预期往复运动。本设计凸轮滑块在推程做等加速等减速运动,在回程运动中做余弦加速度运动,根据《机械原理》[9],其运动方程分别为:

其中:h为推杆行程;δ0为推程运动角;δ0′为回程运动角;δ为凸轮转角。
计算得出凸轮的设计参数,如表2所示。设计的凸轮结构示意图见图2。

表2 凸轮的设计参数
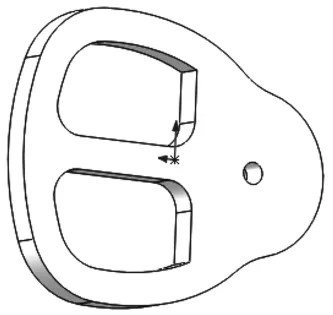
图2 凸轮的结构示意图
4 仿真与实验
4.1 MATLAB模拟轨迹
通过以上分析设计出了结构简单适用的“双8”字型无碳小车,利用MATLAB软件对其进行动力学仿真,通过不断调整小车中不同零件的参数,(如车轮直径、传动比等),对小车轨迹进行优化处理,确定最终合适的参数。MATLAB运动仿真结果如图3所示。

图3 MATLAB运动仿真结果
4.2 实物测试
为验证上述分析和结论的正确性,进行了实物制作并进行样机测试,得出影响小车运动轨迹的主要因素是前轮的转角以及后轮与前轮之间的间距,调整好前轮的摆角大小是决定小车行走“双8”轨迹的决定性因素。影响重物下落快慢的因素是绕线轮直径的大小。测试时选用平整光滑的地面进行试验,以保障小车运动平稳,小车实物图如图4所示。
经过实际验证,小车行走“双8”字轨迹可达20圈,所得到的轨迹变化规律与仿真实验大致相同,但由于凸轮等部分零件的加工精度等原因,造成小车行走过程中转弯速度比预计的稍微快一些,但不影响上述分析的正确性。

图4 小车实物图
5 结语
本设计采用基于凸轮的转向机构,通过计算设计出适当的凸轮轮廓,便可使从动件得到任意的预期运动。微调机构是小车的主要控制部分,在后期调试过程中起着重要的作用,本设计微调机构可调性大,可适应不同的间距行走。使用MATLAB不断对参数进行调整优化,最终得到了理想的参数。本小车整体结构简单,能量损耗较少,成本不高。
