液压挖掘机工作装置的建模与运动学仿真*
2020-03-22白玉梅高红斌宋晓美
白玉梅,高红斌,宋晓美
(山西大学 自动化系,山西 太原 030006)
0 引言
液压挖掘机在我国机械化作业中起着举足轻重的作用,而工作装置的性能及运动状态又决定了液压挖掘机的使用性能。虚拟设计及运动仿真有效降低了挖掘机设计以及整机性能分析的成本,很多高校及学者已在这方面做了大量的工作,西安交通大学[1]、东北大学[2]等很早就运用计算机辅助设计(CAD)对挖掘机的工作装置进行了仿真优化设计;李霞[3]、谭琛[4]、何彦海[5]和 曹永 利[6]分 别 运 用 UG 软 件、SolidWorks、SimulationX和RecurDyn完成了液压挖掘机工作装置的运动仿真。本文在NX三维建模基础上,利用STEP函数真实地模拟了挖掘机的各种工况,并对工作装置的运动轨迹进行了仿真,完成了物理样机无法进行的危险试验,这样可以提供一种直观、快捷的分析方法,具有一定的实际意义。
1 建立工作装置虚拟仿真模型
在NX环境中建立的液压挖掘机工作装置仿真模型如图1所示。动臂由动臂油缸驱动,主要完成回转运动和升降动作;斗杆由斗杆油缸驱动,主要控制铲斗完成挖掘、卸料等工作;铲斗油缸和连杆协调控制铲斗绕斗杆前铰点转动。
2 工作装置运动学仿真及分析
2.1 最大工作范围斗齿尖轨迹的绘制及分析
选择铲斗斗齿尖建立测量点,通过运动仿真得到工作装置的最大运动轨迹图,如图2所示。
从图2可测出挖掘机工作装置的一些主要参数:挖掘高度的最大值H1=9 855mm,卸载高度的最大值H2=7 228mm,挖掘深度的最大值 H3=7 001 mm,挖掘半径的最大值R0=9 999mm。
2.2 挖掘过程斗齿尖轨迹的绘制
液压挖掘机在实际工作中,并不是按最大工作范围进行作业,因此只模拟其主要作业过程:挖掘—提臂—卸料—降臂。在实际挖掘中,初始挖掘状态铲斗斗齿尖一般选择最大挖掘半径的2/3、最大挖掘深度的1/2处。此时,绘制铲斗斗齿尖的运动轨迹,如图3所示。
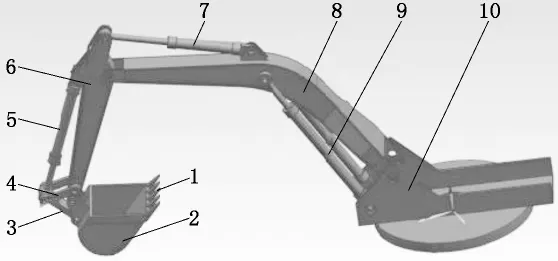
图1 液压挖掘机工作装置仿真模型
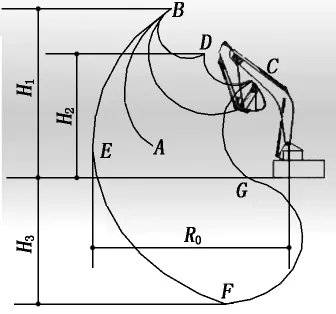
图2 斗齿尖最大运动轨迹
图3 中给出了挖掘循环过程中斗齿尖的运动轨迹:挖掘过程(AB弧线),提臂过程(BC、CD 弧线),卸载过程(DE弧线),降臂回到初始位置(EA弧线),一个工作循环结束。
2.3 挖掘过程的运动参数分析
在上一节的基础上,进一步研究铲斗齿尖的各运动参数。图4(a)为斗齿尖X轴关于时间的平动位移曲线,从图中可得到挖掘过程的最大半径为8 519mm;图4(b)为斗齿尖Y轴关于时间的平动位移曲线,从图中可以看出挖掘过程的最大深度为3 904mm,最大卸载高度为-3 623mm(负号只表示在Y轴负方向)。
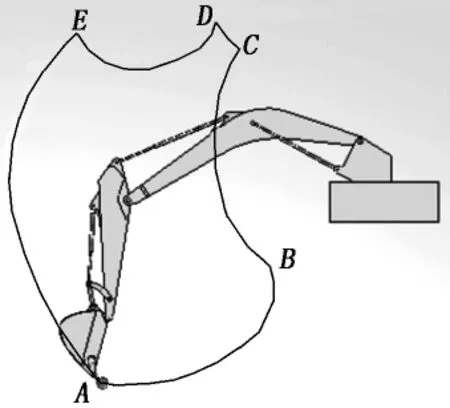
图3 挖掘循环过程的斗齿尖运动轨迹

图4 斗齿尖X和Y轴平动位移曲线
图5 为斗齿尖平动速度幅值曲线。从图5中可以看出:工作装置从开挖点开始,速度逐渐增加并伴有波动;在进入平稳挖掘阶段后,速度变化平稳;在“提臂”、“卸载”过程,速度幅值相差不大;在降臂回到挖掘点的过程中,速度幅值最大,最大速度为3 730mm/s。
图6为斗齿尖X和Y轴平动加速度曲线,图中曲线突变处是由于作业过程交替时油缸制动引起的,所以在这些交替点会出现加速度的骤变,而在每一个作业中加速度是平稳变化的。
3 结语
本文首先利用NX完成了液压挖掘机工作装置的建模。其次,绘制了工作装置的最大运动轨迹图,并精确测量了挖掘高度、卸载高度、挖掘深度以及挖掘半径的最大值等。最后,参考挖掘机实际工况对工作装置的实际挖掘过程做了仿真,并绘制了铲斗斗齿尖的运动轨迹图,且分析了液压挖掘机工作装置挖掘过程中铲斗斗齿尖的平动位移、平动速度和平动加速度的曲线图。
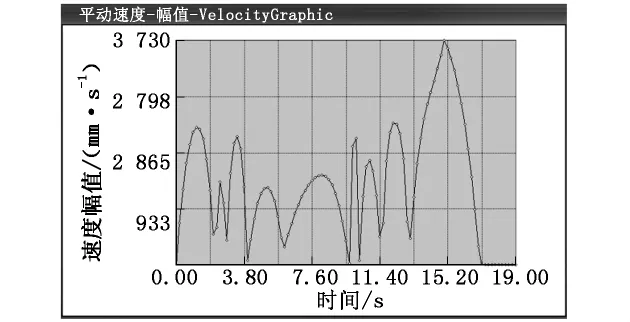
图5 斗齿尖平动速度幅值曲线
