基于FPGA的激光雷达SLAM测绘设计与实现
2020-03-13杨旭
杨旭

摘 要:SLAM(Simultaneous Localization and Mapping)测绘技术作为近年来新兴技术,正受到越来越多的研究者青睐,文章针对激光雷达回波信号强度弱、数据量大、实时性要求高等特点,设计了以现场可编程门阵列(FPGA)为控制核心的高速数据采集系统,利用该系统结合全新的路径导航算法设计出自主导航小车,可在复杂环境下自主巡航并绘制地图,测试结果表明,小车在不同光照度条件下,可实现较好的导航和测绘效果。
关键词:激光雷达;视觉导航;现场可编程门阵列
中图分类号:P412.25 文献标志码:A 文章编号:2095-2945(2020)08-0015-03
Abstract: SLAM (Simultaneous Localization and Mapping) surveying and mapping technology, as a new technology in recent years, is favored by more and more researchers. Aiming at the characteristics of weak signal strength, large amount of data and high real-time requirements of LiDAR echo, a high-speed data acquisition system based on field programmable gate array (FPGA) is designed, and an autonomous navigation car is designed using this system combined with a new path navigation algorithm. It can cruise and map independently in complex environment. The test results show that the car can achieve better navigation and mapping effect under different illuminance conditions.
Keywords: LiDAR; visual navigation; field programmable gate array
引言
激光雷达技术是伴随激光器和雷达技术的发展而产生的一种新型主动式的光学遥感技术,具有数据信息量大、测量范围广、时空分辨率高、在复杂环境下抗干扰能力强等特点,广泛应用在航空航天、大气监测、无人驾驶、地图测绘等領域。
在常见的激光雷达数据采集系统中,大多是利用国外生产的通用数据采集芯片来实现[4-6],一方面由于芯片封装完整,底层数据不对用户开放接口,无法根据实际情况改变数据采集方式,无法升级采集芯片;另一方面此类数据采集卡价格极其昂贵,售后维护不方便。面对国内日益增长的需求,我们采用由上海思岚科技有限公司生产的A2激光雷达作为测绘工具,为进一步保证激光雷达数据采集的实时性和准确性,采用现场可编程门阵列(FPGA)作为主控芯片,传统单片机(DSP、ARM)普遍时钟频率较低、仅可在软件方面对单片机进行编程,无法满足激光雷达高实时性的要求,而FPGA时钟频率非常高,内部延时低,且可在硬件层面控制门电路逻辑结构,具有很高的灵活性,利用其强大的编程HDL语言(Verilog或VHDL)及仿真工具,方便对结果进行验证,可大幅度改进系统的采集速度和采集信号精度,芯片内的空余空间,亦可用于日后的系统升级或其相关数据存储。
1 激光雷达介绍
本文采用SLAMTEC Mapper激光雷达进行测绘,套件包括激光雷达和数据处理单元。用户只需接上5V电源,配合以太网或WIFI进行通信即可工作,可进行每秒10次以上的地图数据融合和最大10万平米地图数据绘制。激光雷达每秒进行7000次的测距动作,最远测距距离可达20米,通过内置处理系统实时进行数据处理,输出高精度的建图信息和定位信息。
2 数据采集逻辑设计
本文根据激光雷达的高速数据,设计了基于FPGA的数据采集系统,系统架构如图1所示,系统采用自顶向下的设计方法,以激光器发出的信号作为触发器,来带动整体时序,在时序电路的控制下,协调FPGA芯片、SDRAM(同步动态随机存储器)芯片、USB芯片的工作,对激光雷达输出的脉冲信号进行高速计数采集,将采集到的信号数据存储在SDRAM中,待周期采集信号采集完毕,通过USB输出对应结果到上位机输出。上位机根据激光雷达采集到的距离信息进行建模,生成对应空间地图。
3 巡航路径规划
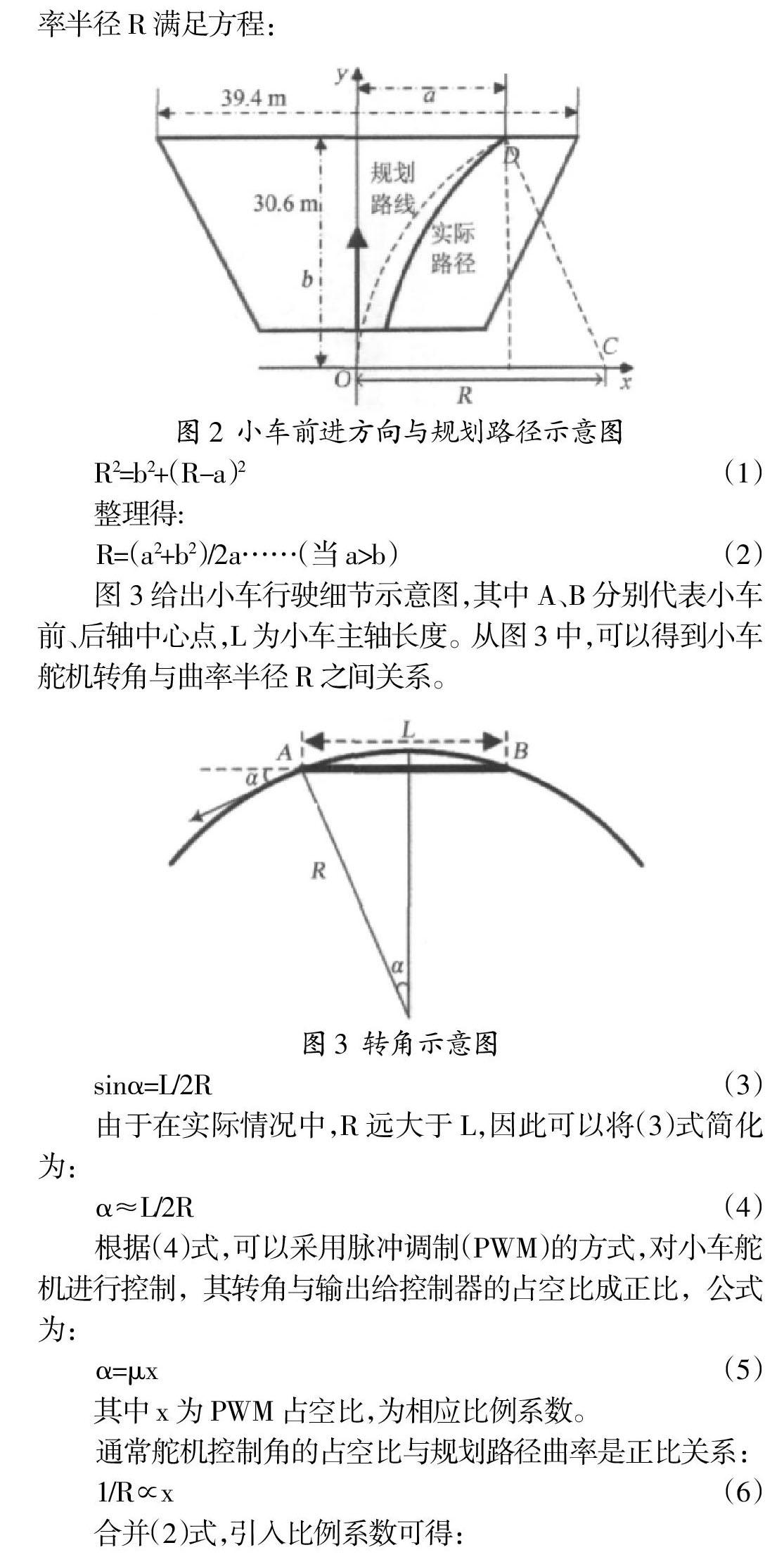
小车上的激光雷达是固定的,其探测路径将随着小车自身移动进行位置变化,如图2是小车前进路径示意图,其中y轴为前进方向,O为小车前进方向中心点,D为激光雷达探测最远端路劲中心点,即目标点,规划路线为通过O和D且与y相切的圆弧路径,如若小车因车轮、地面摩擦力、障碍物阻挡等因素,偏离路径,其预设的规划路线,可指引小车逐渐回归导航路径。根据图2给出的几何关系,可以得出规划路径的曲率半径R满足方程:
在路径巡航过程中,b值保持不变,只需要测的D点的距离,也就是D的横坐标值,即可根据(7)式,求出相应PWM的占空比,实现对小车路径规划控制。
4 FPGA实现
小车控制系统采用FPGA作为控制核心,在算法实现方面,如图4所示。
图4中有4个模块:图像数据采集模块、滤波及二值化模块、路径识别模块、小车控制模块。每一个模块都对应于一个独立设计的电路结构,由于FPGA的独特特性,整个系统的不同模块,是并行工作的。FPGA芯片使用的是Xilinx公司生产的Artix-7,整个系统共使用2489个4输入的查找表(look-up Table),占用总资源的26%。
5 系统调试与实验结果
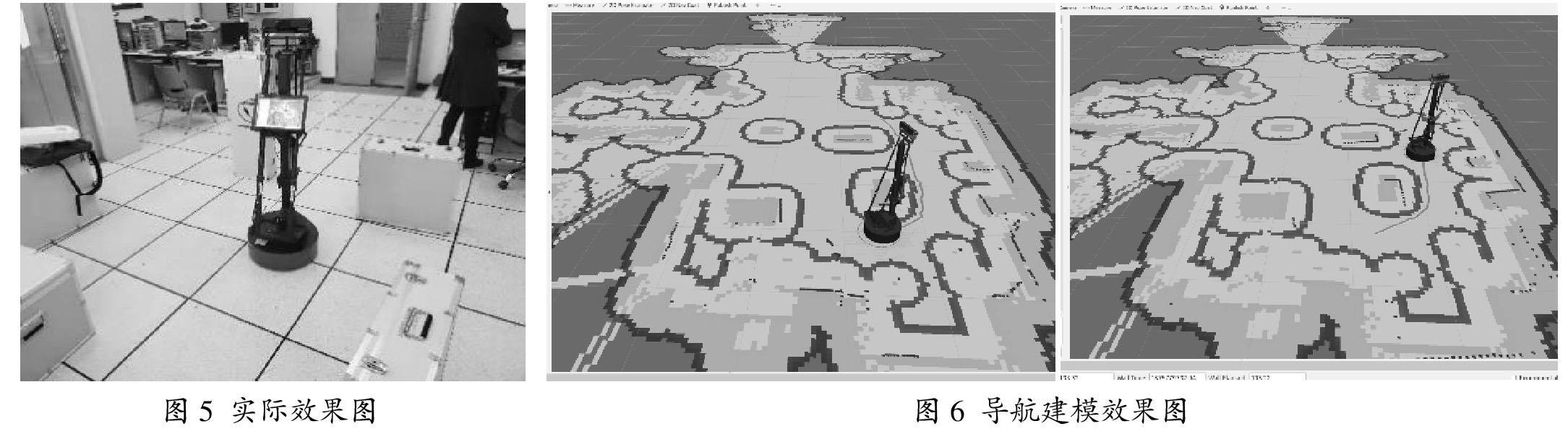
小车在开窗的室内环境下,进行巡航建图,其效果如图5、图6,实现情况基本符合预期设定。
6 结束语
本文介绍了一种基于FPGA的激光雷达SLAM测绘小车系统,采用以FPGA门阵列作为处理控制中心,实现对激光雷达采集数据的高速处理,实现了在复杂环境下的小车导航和Slam测绘。
参考文献:
[1]赵举,李国斌,姜涛.基于OpenMV的单目视觉二维码追踪小车设计与测试[J].电子设计工程,2019,27(19):53-58.
[2]张昭,辛鑫,李志.基于AGV智能小车的通信模块设计[J].数码世界,2019(1):68-71.
[3]袁瑞豪,王一豪,孙振涵.基于K66单片机的恩智浦智能小车制作[J].无线互联科技,2019(11):122-124.
[4]Becker W, Bergmann A, Biscotti G L, et al. Advanced time-correlated single photon counting techniques for spectroscopy and imaging in biomedical systems[C]//.2004.
[5]Granados, M. J, Nava-Guzman, Bravo-Aranda, J. A, et al. Hygroscopic growth of atmospheric aerosol particles based on active remote sensing and radiosounding measurements: selected cases in southeastern Spain[J]. Atmospheric Measurement Techniques,2014,8(2):705-718.
[6]高健.多普勒激光雷达单纵模稳频激光脉冲鉴别技术[D].中国科学技术大学,2017:57-60.
