TLP张力腿下部连接结构分析
2020-03-09王世圣呼文佳赵晶瑞韩旭亮
王世圣, 呼文佳,赵晶瑞, 韩旭亮
(中海油研究总院有限责任公司,北京 100028)
0 引 言
TLP是一种典型的深水浮式平台,主要用于深水油气田开发。TLP作为油气田开发装置可以用于干式采油,采油树安装在平台上,便于钻井、完井和修井作业。
TLP采用张紧的钢管,即张力腿系泊。张力腿的预张力来自浮体的剩余浮力,预张力作用在张力腿平台的垂直张力腿系统上,使张力腿时刻处于受拉的绷紧状态。较大的张力腿预张力使平台平面外的运动(横摇、纵摇和垂荡)较小,近似于刚性。张力腿与平台和海底基座的连接采用铰链连接,因此在水平方向可以顺应水平环境载荷运动,依靠预张力使得平台恢复平衡。张力腿平台系泊方式使得平台具有良好的运动性能。TLP在位期间,遭受风、浪和流载荷联合作用,张力腿及其相关的连接构件承受交变载荷作用,张力腿及其上下连接的结构强度和疲劳强度对整个TLP系统的安全性有很大影响,尤其是张力腿下部连接结构,由于该结构位于水下几百米,甚至数千米,其工作状态或损伤情况不便监测和检查,因此在该结构的设计中需要格外重视,确保该结构的强度和疲劳强度满足设计要求。本文基于LH16-2 TLP的总体性能分析,研究了张力腿系泊系统的受力情况,依据张力腿的外力计算结果对张力腿下部连接结构的强度和疲劳强度进行了分析,获得了一些结论,对相关技术人员有一定参考价值。
1 TLP张力腿系统组成
LH16-2 TLP主要由上部设施模块、平台主体(包括四立柱、连接四立柱的旁通)和张力腿系泊系统组成,系统包括8根张力腿,分成4组,分别布置在4个立柱的外侧底部。平台主尺度如表1所示。
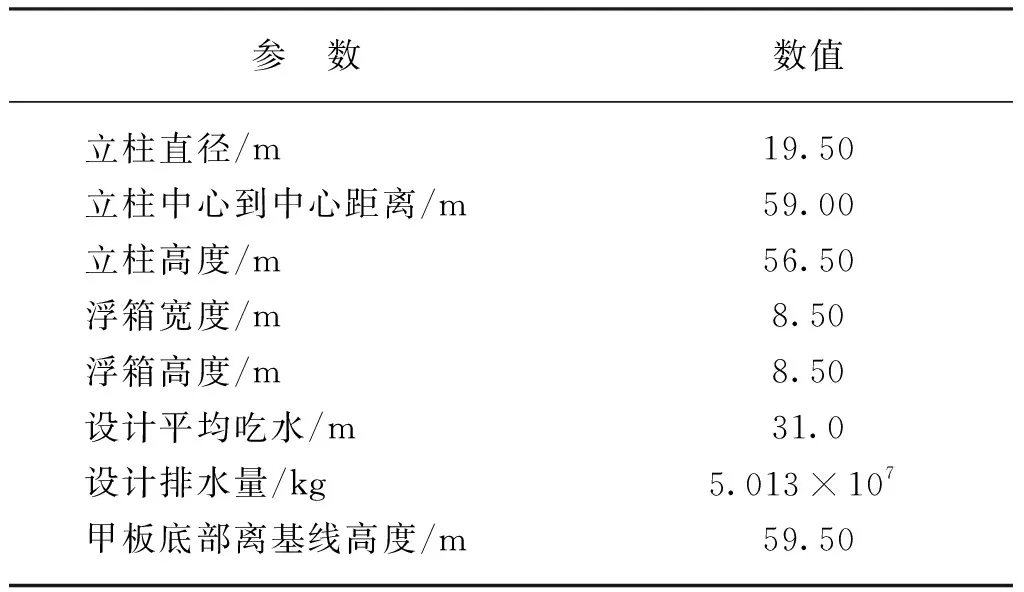
表1 平台主尺度
张力腿系泊系统包括张力腿和上下连接结构,如图1所示。下部连接结构如图2所示。张力腿下部连接结构由张力腿底部接头组件、桩头接收器组成,在安装时张力腿连接器插入接收器旋转一定角度,桩头接收器就可以将张力腿连接器锁住。由于张力腿始终承受拉伸载荷作用,可以保证两者的连接状态。张力腿连接器是一个组合结构(见图1),张力腿管与连接器圆头结构是柔性连接,这样可以减小张力腿管柱的附加弯曲应力。张力腿平台在位期间承受变化环境载荷作用,载荷通过张力腿管柱传递给连接器和接收器,因此相关组成结构长期承受交变载荷作用,必须具有足够的结构强度和疲劳强度。张力腿下部连接结构位于水下数百米,甚至1 000多米,检修不便,根据API RP 2T的相关要求,对于失效后严重影响生产的关键部位和不便于修理的部位,要考虑一定的安全余度。要求张力腿与桩基连接装置结构的疲劳寿命应至少是服役寿命的10倍。
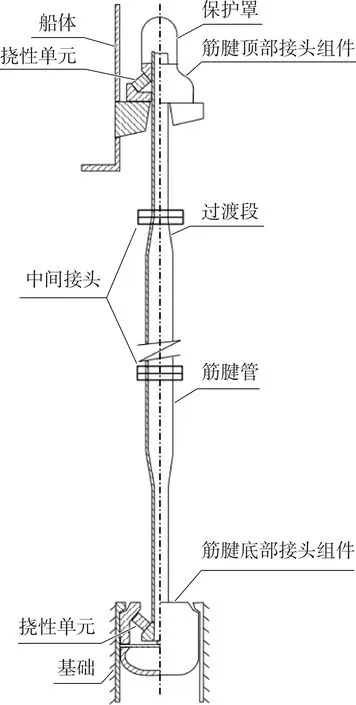
图1 张力腿系统
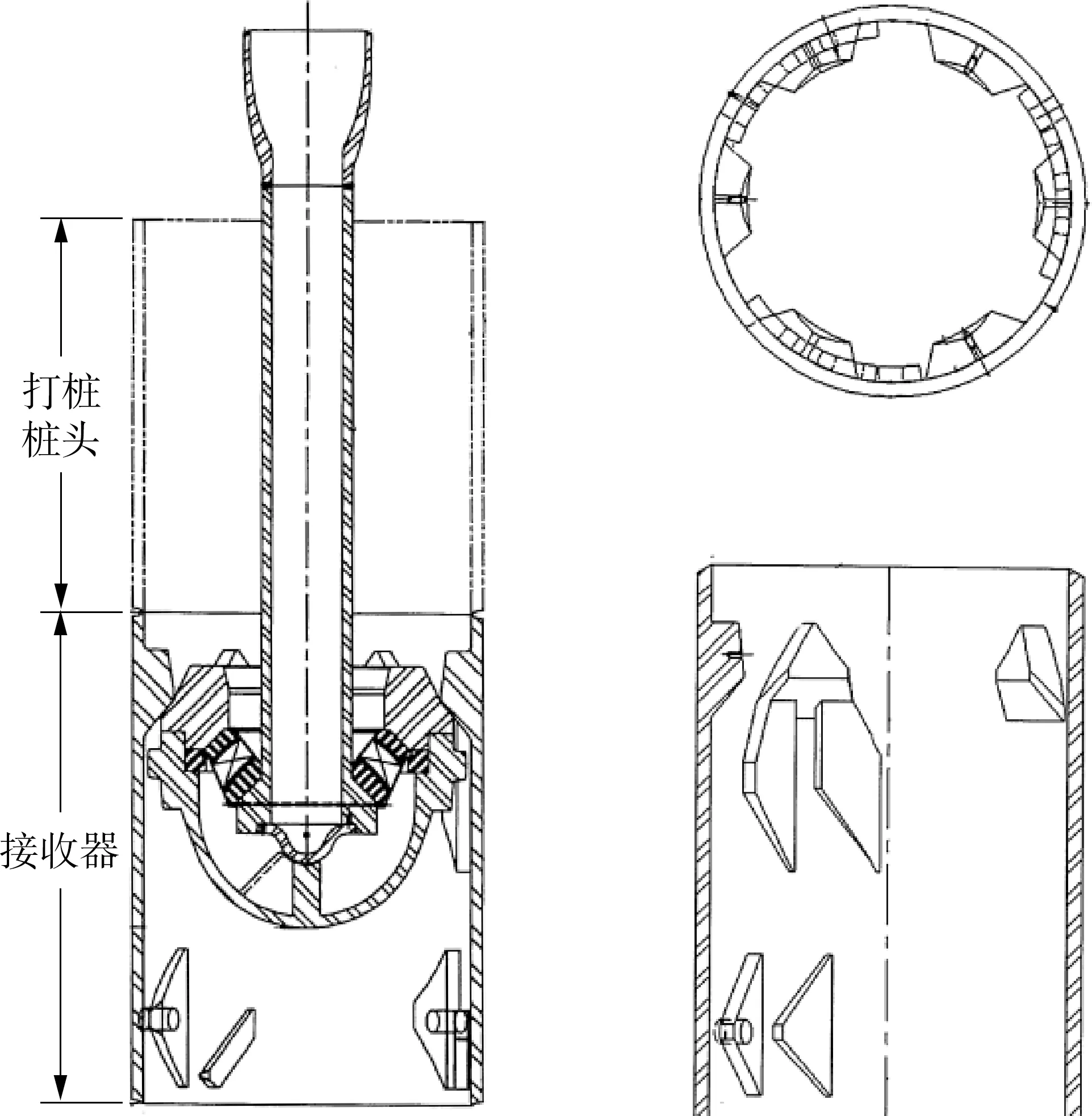
图2 下部连接结构
2 载荷工况
张力腿平台在位期间承受风、浪、流环境载荷作用,在环境载荷作用下平台发生偏移,张力腿管柱承受的载荷也随着平台的偏移发生变化。一般张力腿与桩基连接装置结构的设计需要考虑张力腿静态和动态张力。TLP平台在平衡位置仅承受静载荷作用,静载荷可通过剩余浮力的计算获得。TLP在环境载荷作用下,平台运动使得张力腿承受交变拉力作用,在不同工况下张力腿张力可通过总体性能分析获得。根据API RP 2T的相关要求,张力腿张力计算须考虑在位完整工况,极限完整工况和一根张力腿移除生存工况。表2给出了三种工况下张力腿与桩基连接装置结构的设计载荷。
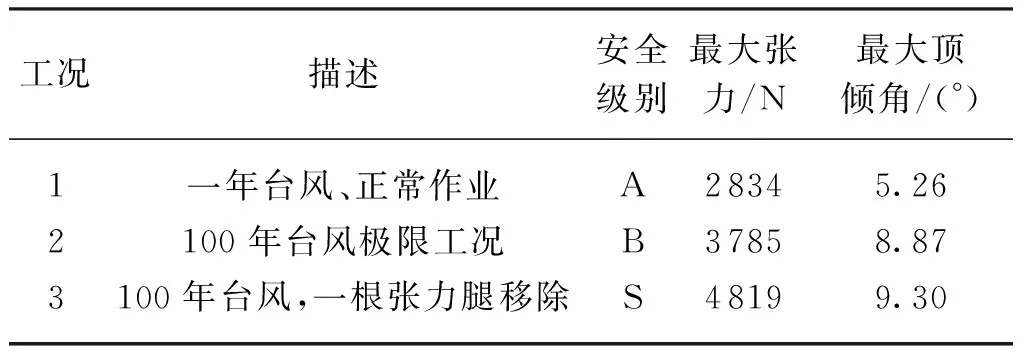
表2 设计载荷
在表1中,安全级别的定义参见API RP 2T。它包括环境条件和安全因子,用于校核总体可靠性,保证有一定的设计裕度。顶倾角是指张力腿轴线和垂向的夹角。
每个工况张力腿张力均分解为水平分量和竖直分量。为获得各工况的最危险应力,水平分量0°~90°每隔45°一个间隔,如图3所示。每一种工况的最大应力结果是选取这3个方向中工况结果的最大值。值得注意的是,上述水平载荷是倾斜的张力腿张力的水平分量,该倾斜张力以水平分量和竖直分量的组合形式施加在有限元模型中。张力载荷通过刚性单元施加筋腱连接器柔性单元旋转中心。
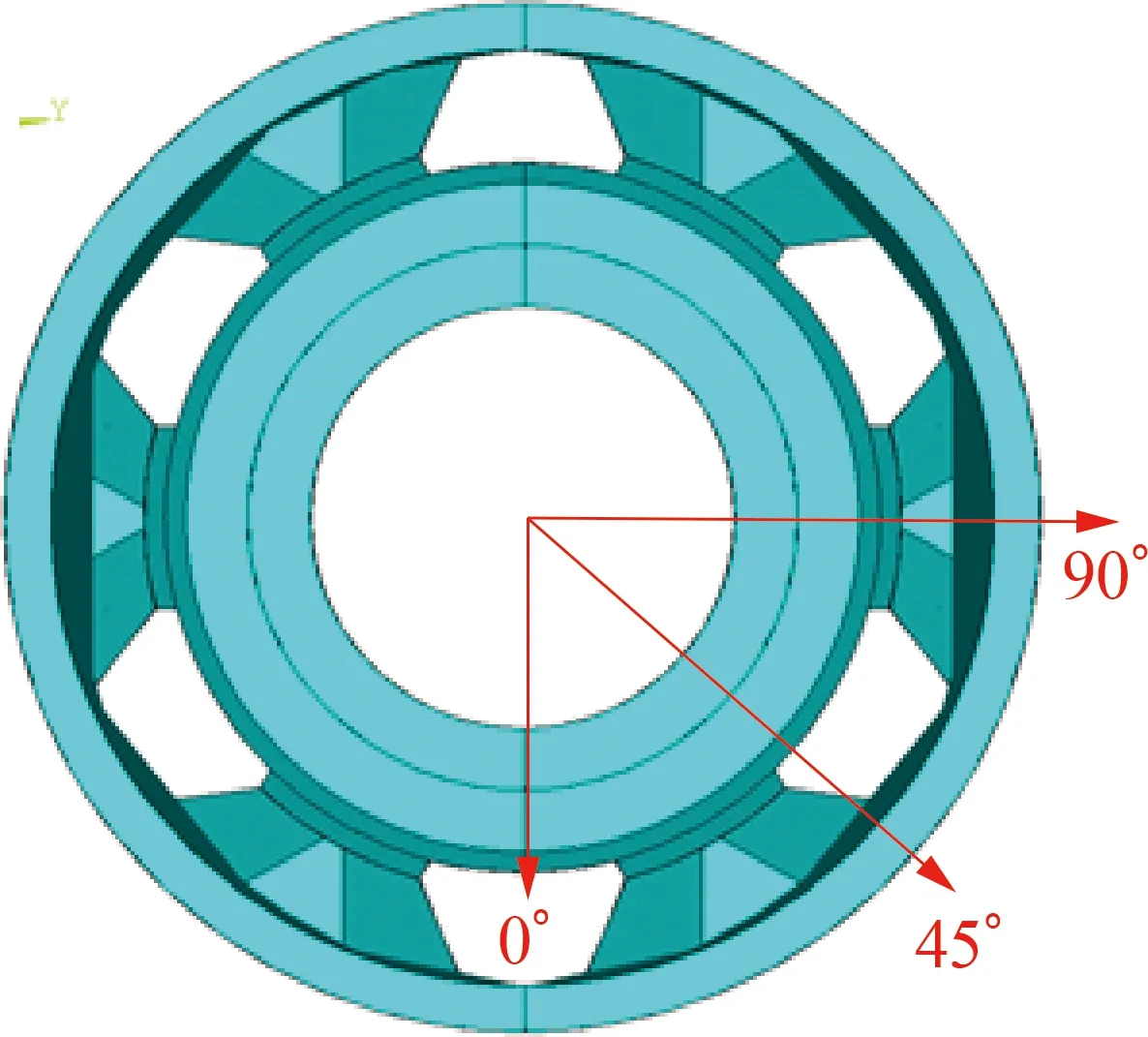
图3 张力载荷水平分量方向
3 结构强度分析
3.1 分析模型
张力腿与桩基连接装置结构模型包括张力腿连接器锥形上吊耳结构及相邻上下环形结构、桩接收器以及附在壁内的吊耳。结构采用通用有限元软件进行有限元结构建模及分析。主要荷载传递路径采用SOLID185单元模拟,角落和非常规形状部件采用SOLID187单元模拟,张力腿连接器上的吊耳与桩接收器内的吊耳的接触采用接触单元(contact element)170和174模拟,外部荷载传递采用LINK180单元模拟。整个结构有限元模型高度为3.2 m。
由于研究对象为张力腿与桩基连接装置,并且TLP的8个连接装置的结构形式完全一致,所以可以选取任何一张力腿对应的连接装置结构作为研究对象。在网格划分时,对重点关注的区域如吊耳,采用细网格Element185划分。为节省运算时间,对于其他区域采用较为粗糙的网格。该有限元模型共有109 200个单元,153 700个节点。整体有限元模型如图4所示。
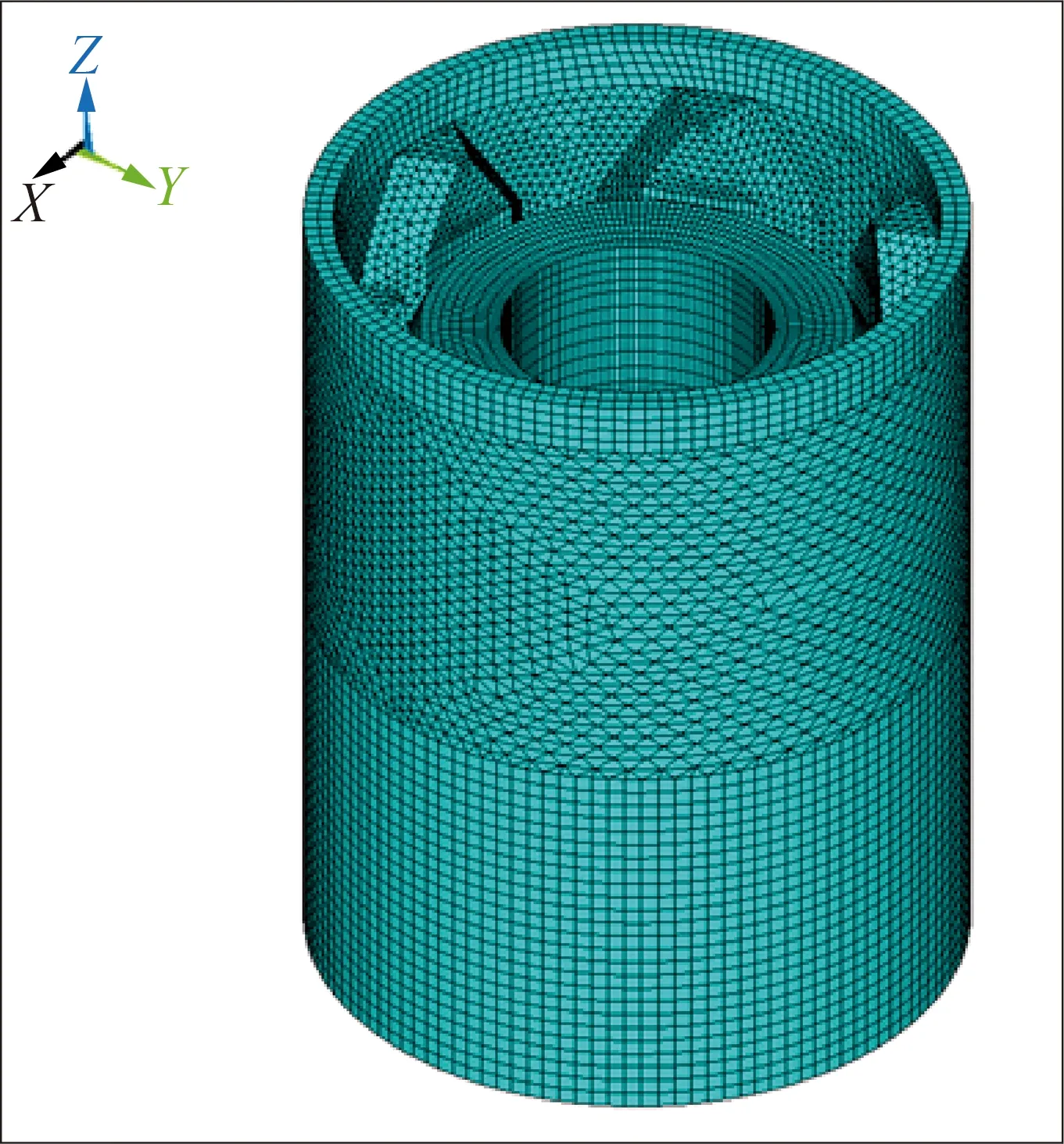
(a)
(b)
3.2 结构强度分析结果
在建立了结构有限元模型后,对模型施加边界条件,边界条件施加在模型桩接收器环形结构底部,在此边界上的Ux、Uy和Uz三个平动自由度全部被约束。结构强度有限元分析共考虑表2中的三种工况,对于每种工况,还有三个方向子工况用于获取最大应力结果。应力结果均取平均单元应力。在三种工况下,结构应力分析结果如表3~表5所示。
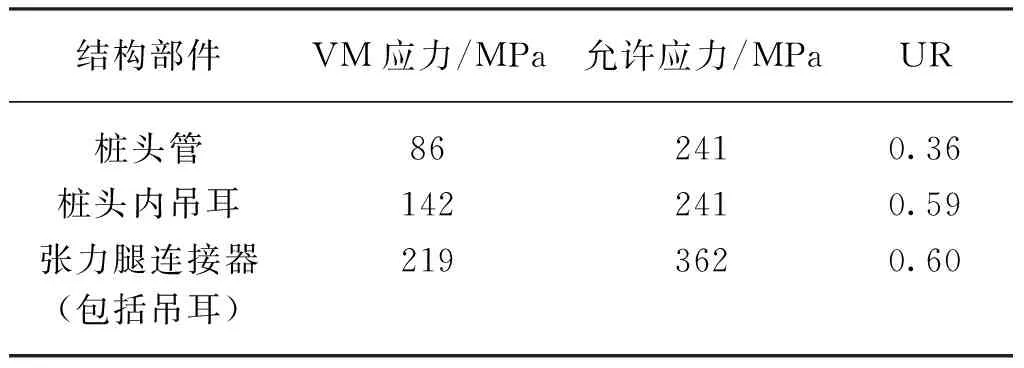
表3 连接装置相关结构强度应力结果(正常作业)
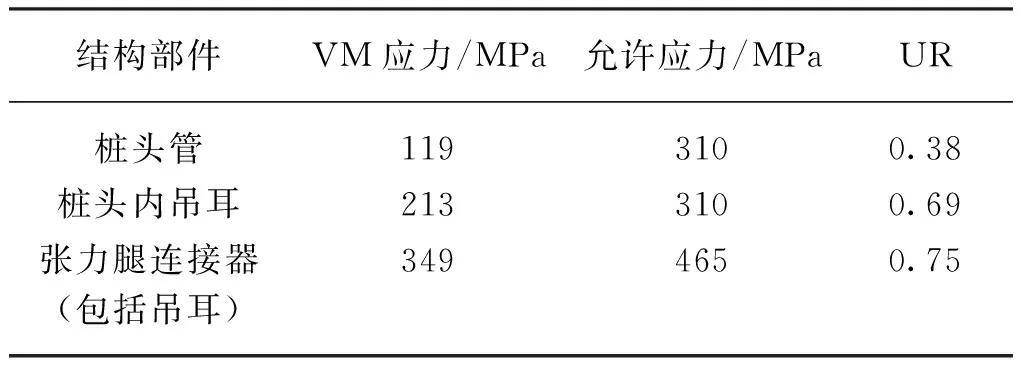
表4 连接装置相关结构强度应力结果(极限工况)
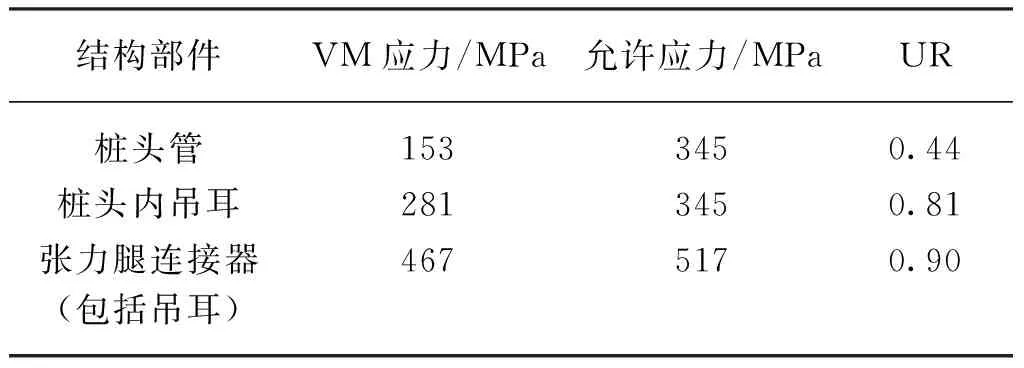
表5 连接装置相关结构强度应力结果(生存工况)
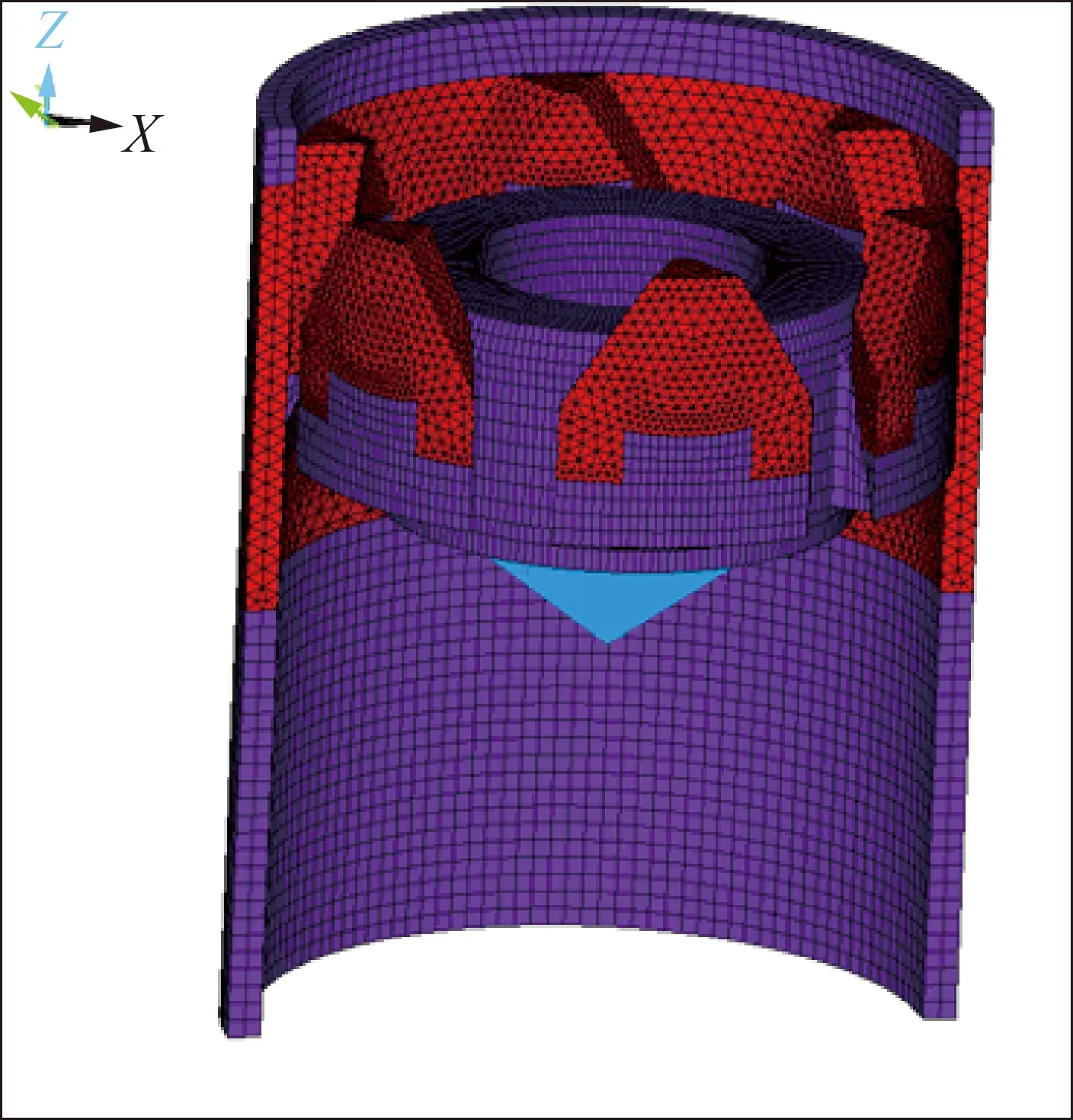
根据表3~表5张力腿连接装置相关结构强度应力结果,三种工况依次是在生存工况下结构应力最大。在张力腿连接装置中桩头管与桩连接,载荷由张力腿连接器组件施加,结构应力小于张力腿连接器组件。张力腿连接器组件与张力腿连接受力复杂,结构应力较大,如图5所示。最大应力部位出现在张力腿连接器吊耳上,但其有效应力仍小于许用应力,张力腿连接装置相关结构强度满足规范要求。
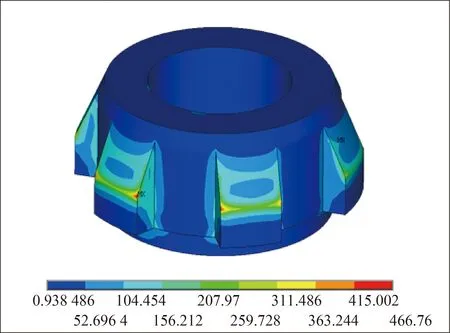
图5 张力腿连接器应力云图-生存工况
4 结构疲劳分析
张力腿平台的服务使用寿命为20年,因此要求张力腿与桩基连接装置结构疲劳设计寿命应高于200年。根据API RP 2T的相关要求,对于失效后严重影响生产的关键部位和不便于修理的部位,要考虑一定的安全余度。例如,对于不进行检修的区域,如张力腿与桩基连接装置结构,其疲劳寿命应至少是服役寿命的10倍。
TLP平台张力腿与桩基连接装置结构的疲劳分析采用时域方法和与之相关的雨流计数法。在时域方法中,长期的波浪海况离散成为有代表性的短期海况。通过对每一个短期海况的分析算出张力腿上的张力,并将其施加到连接结构的模型上。通过结构分析,计算出应力响应。雨流计数法用于张力时间序列的应力循环的估计;累计的疲劳损伤则是基于S-N曲线。
4.1 有限元模型
张力腿与桩基连接装置结构的疲劳分析和结构强度分析使用同一个有限元模型,唯一的区别是划分的单元尺寸。根据海洋结构物疲劳分析的相关规范,热点处推荐使用尺寸为板厚×板厚的网格单元,并且在远离关键部位的网格划分尺寸逐渐增大;从而简化整个结构模型,提高计算效率。
4.2 热点及热点应力
疲劳损伤一般发生在应力集中处,如变截面、焊接接头等。所以,疲劳计算一般选取这些接头处的热点,如图6和图7所示。热点区域处节点的主要应力结果如表6所示。

图6 桩接收器上的热点区域
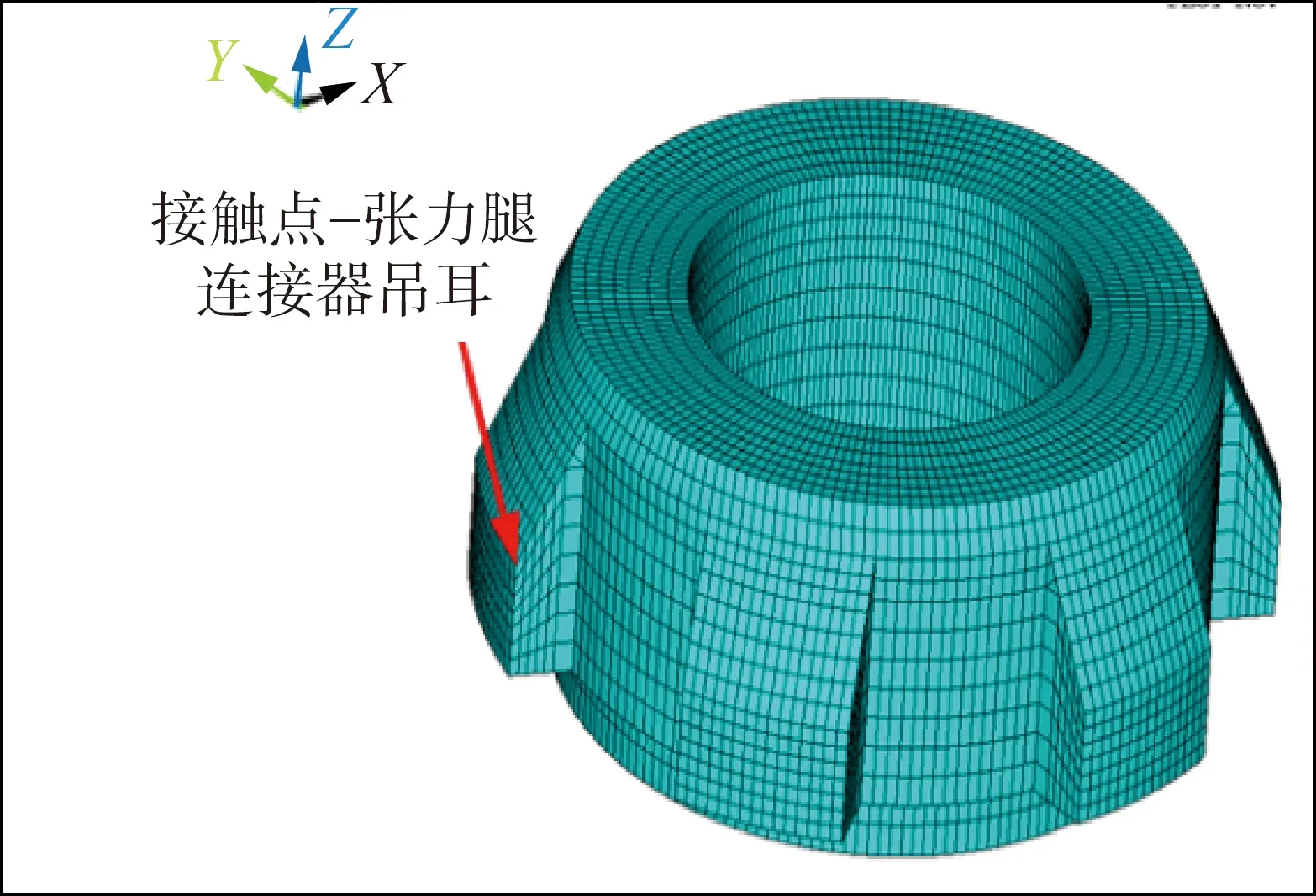
图7 张力腿连接器上的热点区域
表6 热点主要应力乘数
根据表6所示的热点应力,采用雨流计数法,将每一种海况下应力循环次数叠加起来,形成用于疲劳损伤的总的应力循环次数。基于DNV规范RP-C203中的疲劳曲线C曲线,可获得连接装置结构热点处疲劳寿命计算结果,如表7所示。张力腿与桩基连接装置结构最短的疲劳寿命到达了96 888年,远高于设计要求的200年。
表7 热点处的疲劳寿命
5 结 语
张力腿系泊系统是张力腿平台的重要组成部分,张力腿连接装置是整个系统的关键部件,要求该组件结构强度和疲劳寿命必须满足规范要求,以保证张力腿平台的在位安全。为保证张力腿连接装置的结构强度和疲劳寿命,对其进行了结构分析,获得结论如下:
(1) 张力腿连接装置作为平台系统关键部件,其结构强度必须满足规范要求,须进行作业工况、极限工况和张力腿移除的生存工况下的强度校核,每个工况下的有效应力应小于许用应力。
(2) 平台在环境载荷作用下,做往复运动,为获取各工况的最危险应力,对每一种工况,需要考虑张力腿载荷在不同倾角时的水平分量和垂直分量。水平分量从0°~90°,每隔45°一个间隔。对每一种工况,最大应力结果是从这3个方向的结果中选取最大值。
(3) 依据张力腿连接装置实际结构建立结构有限元模型,计算结果表明在生存工况下张力腿连接器组件结构应力较大,最大应力部位出现在张力腿连接器吊耳上,但其有效应力仍小于许用应力,张力腿连接装置相关结构强度满足规范要求。
(4) 根据API RP 2T的相关要求,对于失效后严重影响生产的关键部位和不便于修理的部位,要考虑一定的安全余度,其疲劳寿命应至少是服役寿命的10倍。热点区域的疲劳寿命计算结果表明张力腿与桩基连接装置结构最短的疲劳寿命超过了设计寿命。
