吸力锚吊装入水动力学分析
2020-03-09郭睿男昝英飞郝高正
李 俊,郭睿男,昝英飞,罗 超,郝高正
(1. 海洋石油工程股份有限公司,天津 300450;2. 哈尔滨工程大学 船舶工程学院,哈尔滨 150001)
0 引 言
吸力锚结构被广泛应用于海底结构物的固定、海上风机桩腿和钢悬链线立管安装作业,是海上石油生产的重要基础设施。利用起重安装船垂直吊放的安装方法在国内外应用广泛[1]。Selvåg[2]对海底压缩机模块进行拘束规则波砰击实验,发现测量模块受到的水平力和垂直力,并将实验结果与Simulation of Marine Operations (SIMO)和Orcaflex的软件结果进行对比,评估预报模块砰击载荷的准确性。陈勇等[3]基于Det Norske Veritas规范的结构物吊装入水简化算法获得相应的动态放大系数,并与采用Orcaflex软件的结果进行了对比分析。梁海青[4]利用有限元软件FLUENT研究采油树下放过程中动力学影响因素,最终确定采油树安装环境要求。周傲[5]以海底模块的吊装试验为依据,验证SIMO的模拟并进行结构物入水耦合响应仿真研究。Li等[6]利用SIMO程序建立船舶系留系统的耦合数值模型,计算了瞬态下降过程中阀芯上的砰击载荷和浸没载荷。Chilinski等[7]利用幅值响应算子(response amplitude operators,RAO)建立激励函数计算船舶的运动,不考虑吊物和船舶的耦合,根据第二类拉格朗日方程推导三自由度的吊装系统运动模型,进行重量和吊臂顶端位移的参数化研究,并研究规则和不规则波的响应。Naess等[8]研究了吸力锚经过飞溅区时空气和水的相互作用,根据软件ANSYS CFX求解附加质量并进行吸力锚吊装的时域仿真。Ha等[9]通过实验和时域模拟,研究在波浪中使用浮吊对浮托进行吊装时不同载荷分配和不同波浪条件下起重机钢索的动张力,并讨论了桩腿的冲击力。
吸力锚入水时大量空气仅由通风孔排出,除控制速度外,开孔率不足将引发较大的浮力进而发生突变载荷或引发吸力锚的倾斜[10]。吸力锚的开孔会在空腔中和锚壁附近产生回流和大面积的涡[11]。因此吸力锚中空气的状态是吸力锚入水过程的重要影响因素之一。然而,关于空气对吸力锚吊装作业影响的研究尚不足,目前仅确定在通过飞溅区时为了避免较大的浮力,确保空气被充分排出,必须在吸力锚的顶部安装一个通风孔。为了避免较大的浮力可能导致吊索松弛,通风孔水平面积与锚顶的比值(开孔率)必须足够[12]。
本文利用计算流体力学软件Star-CCM+ 2020.1,基于雷诺时间平均navier-stokes (Reynolds-averaged navier-stokes,RANS)方程,对由四个吸力锚构成的结构物在可压缩和不可压缩空气环境中的飞溅区吊装作业进行研究。在评估结构物总体载荷的同时,进一步对可压缩和不可压缩空气在吸力锚内的压力进行分析,为将来吸力锚结构的载荷评估和结构优化提供参考。
1 数值方法
1.1 控制方程


(1)
(2)
(3)

采用流体体积函数法(the volume of fluid,VOF)求解多相流,VOF的实现属于预测非混合相界面分布和运动界面捕捉的方法。相的分布和界面的位置由相体积分数αi来描述。定义相i的体积分数为
(4)
其中:αi=0时,表示完全没有相i;αi=1时,网格完全充满了相i; 0<αi<1时,网格内存在相的交界面。
本文分别对可压缩空气和不可压缩空气进行建模,设定如下:
(1) 不可压缩空气,密度恒定,不使用能量模型。
(2) 可压缩空气,等温模型,理想气体,初始温度为15℃,比热比k=1。
(3) 可压缩空气,绝热模型,初始温度为15℃,比热比k=1.4。
对于条件(3),双原子气体,如空气,在绝热条件时比热比为1.4[14]。根据Tregde[15],初始空气密度(ρg0)和压强(p0),瞬时空气密度(ρg)与压强(p)的关系定义为
(5)
密度随压强的导数为
(6)
本文还做出如下假设: 研究中分别设置水和空气的特性,对水进行建模时应用定常密度,从而保证水是不可压缩的;假设结构物为刚体且不考虑水弹性效应。
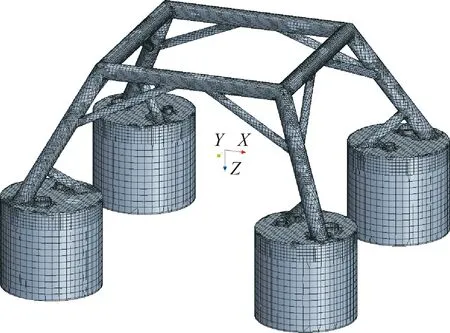
1.2 研究对象
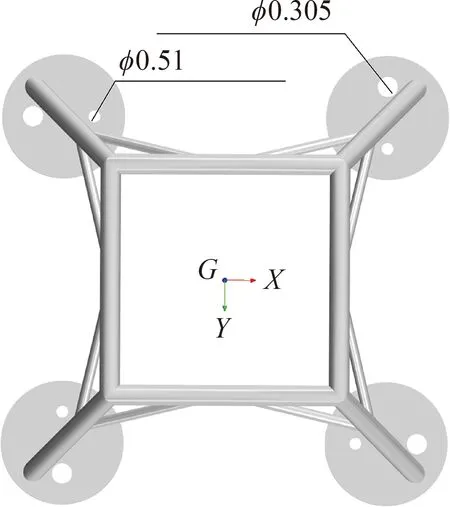
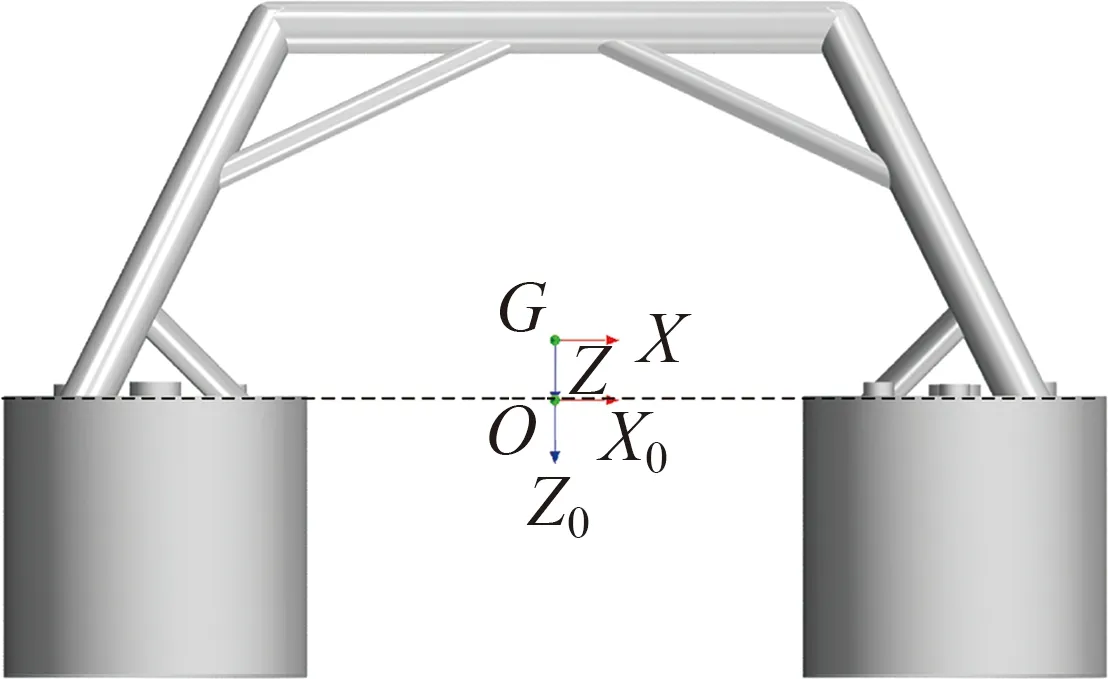
考虑缆绳张力、网格精细度以及计算量,设定模型与实物间的比例尺为0.5。结构物模型主要由4个吸力锚和钢管焊接形成的钢架构成,模型高H为6.65 m,宽B为13.9 m,空气中质量为25 t;吸力锚直径为3 m,高2.75 m,锚壁厚0.01 m,设有两个通风孔,直径分别为0.305 m和0.51 m。重心距结构物底端3.281 m。选取起重机实际释放速度为0.1 m/s,模型的释放速度为0.07 m/s[16]。结构物模型、吸力锚的编号及随体坐标如图1所示。吸力锚尺寸相同,但通气孔的布置并非对称,如图1(a)所示。固定坐标系位于重心正下方与吸力锚顶部的上表面等高的平面上,坐标轴方向与随体坐标一致,如图1(b)所示。模拟中吸力锚进行六自由度运动。
(a)
(b)
(c)
(d)
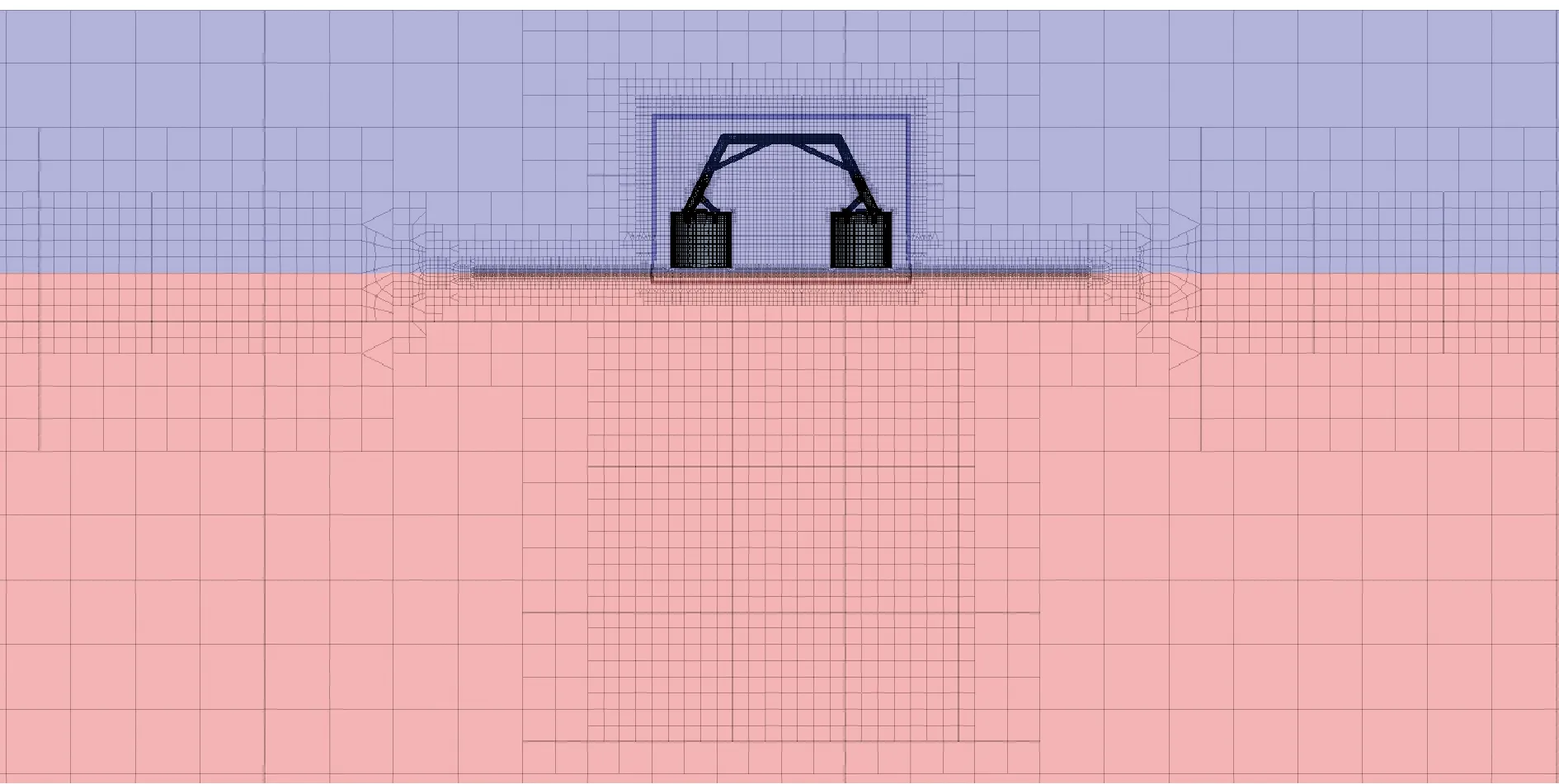
1.3 计算域与模型网格划分

(7)
式中:f1和f2为一阶和二阶阻尼系数,nd为阻尼指数,xed为波浪阻尼区域的终点(边界),xsd为阻尼区域的起点[见图2(b)中的红色矩形],x为阻尼区域[见图2(b)中灰色区域]内水平方向的坐标。
(a) (b)
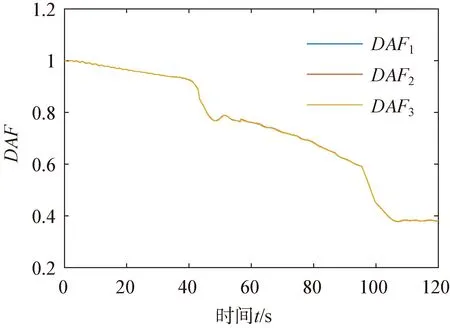
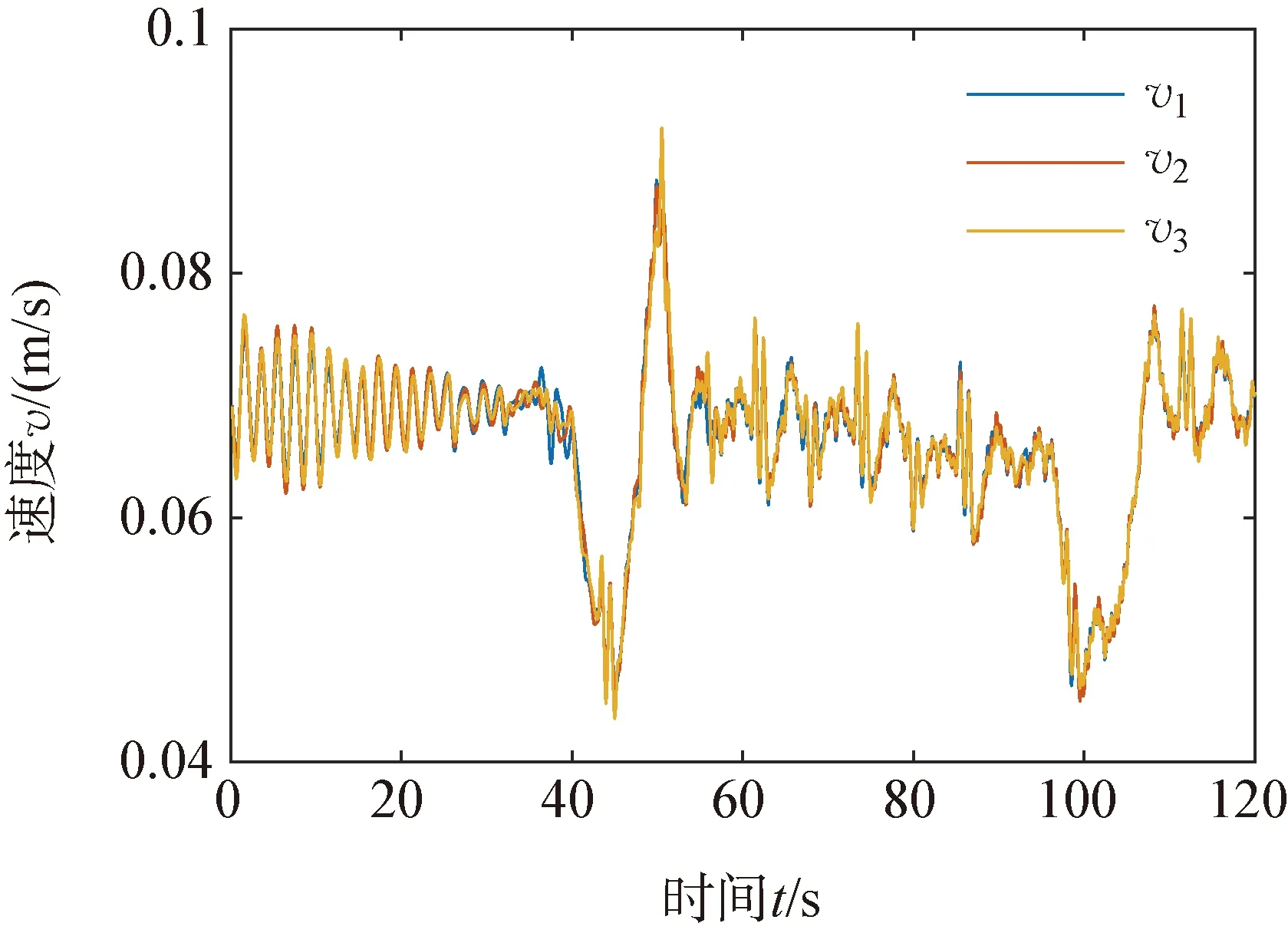
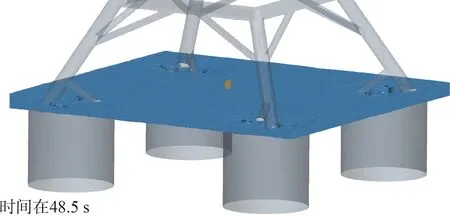
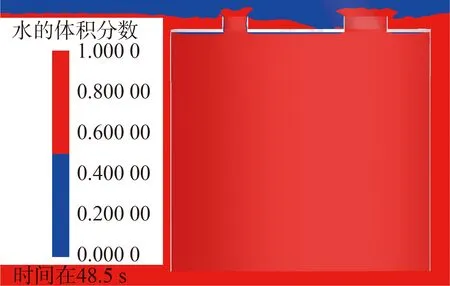
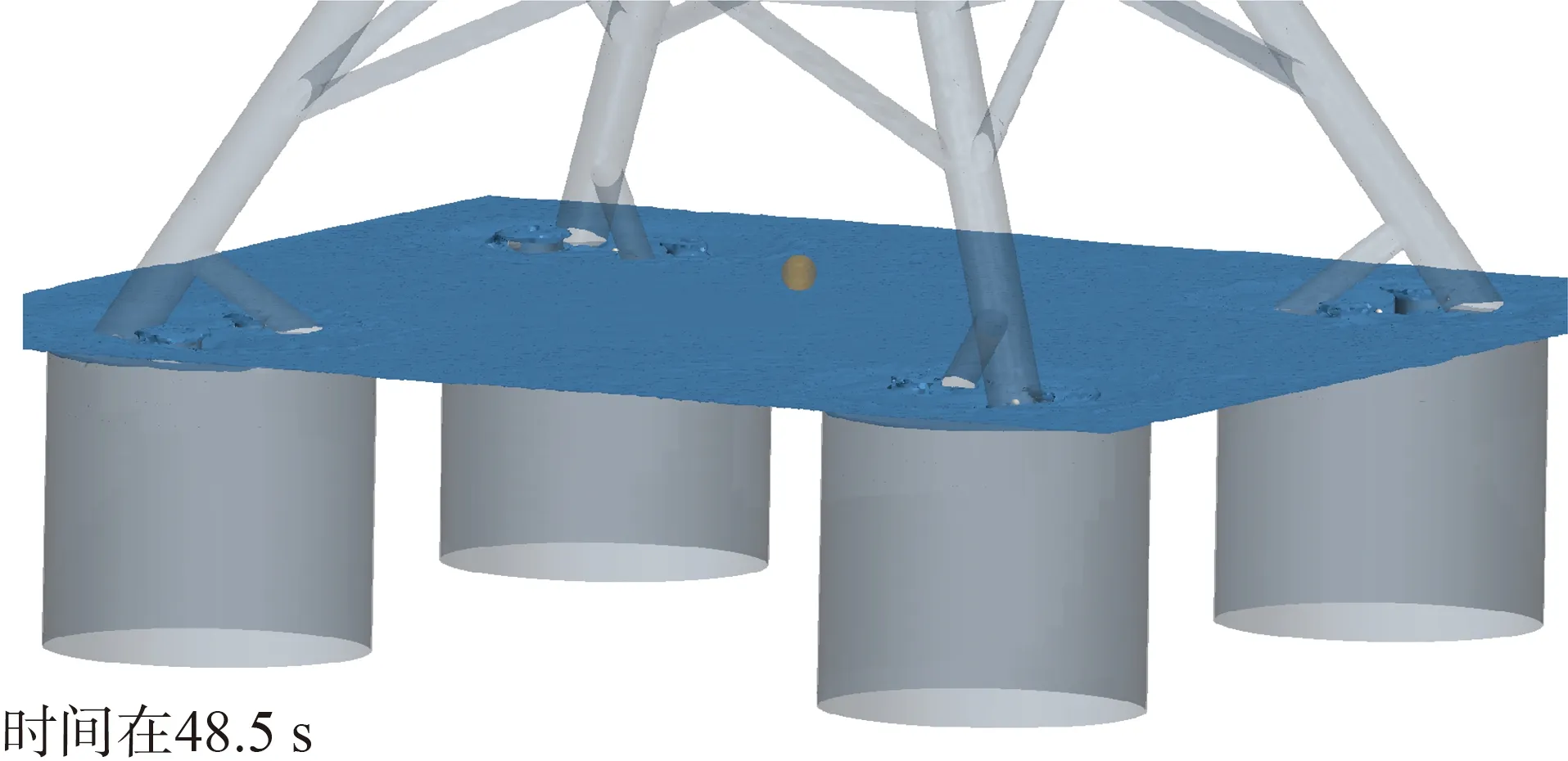
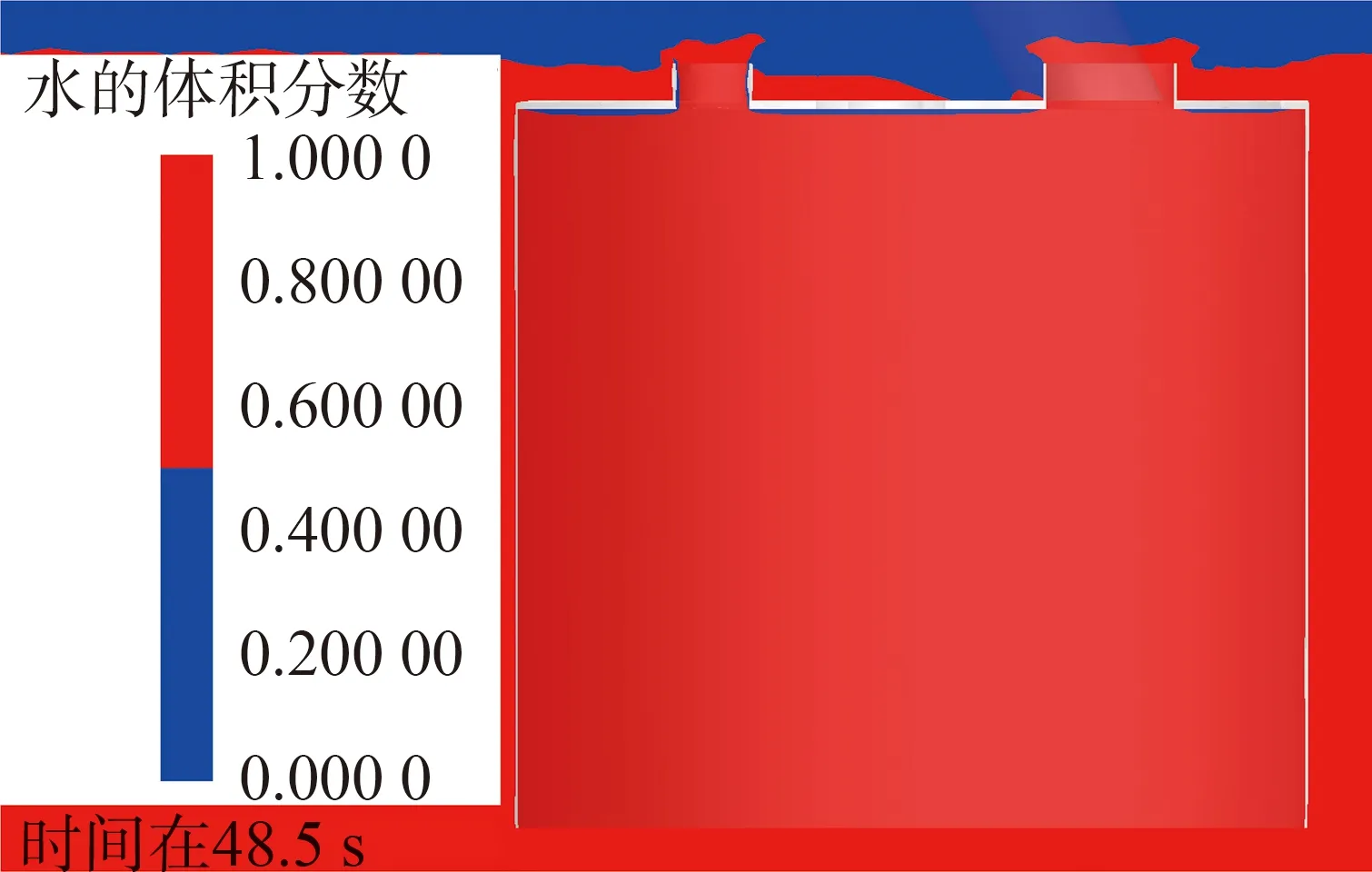
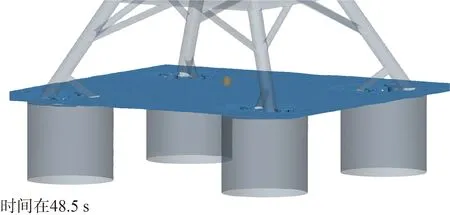
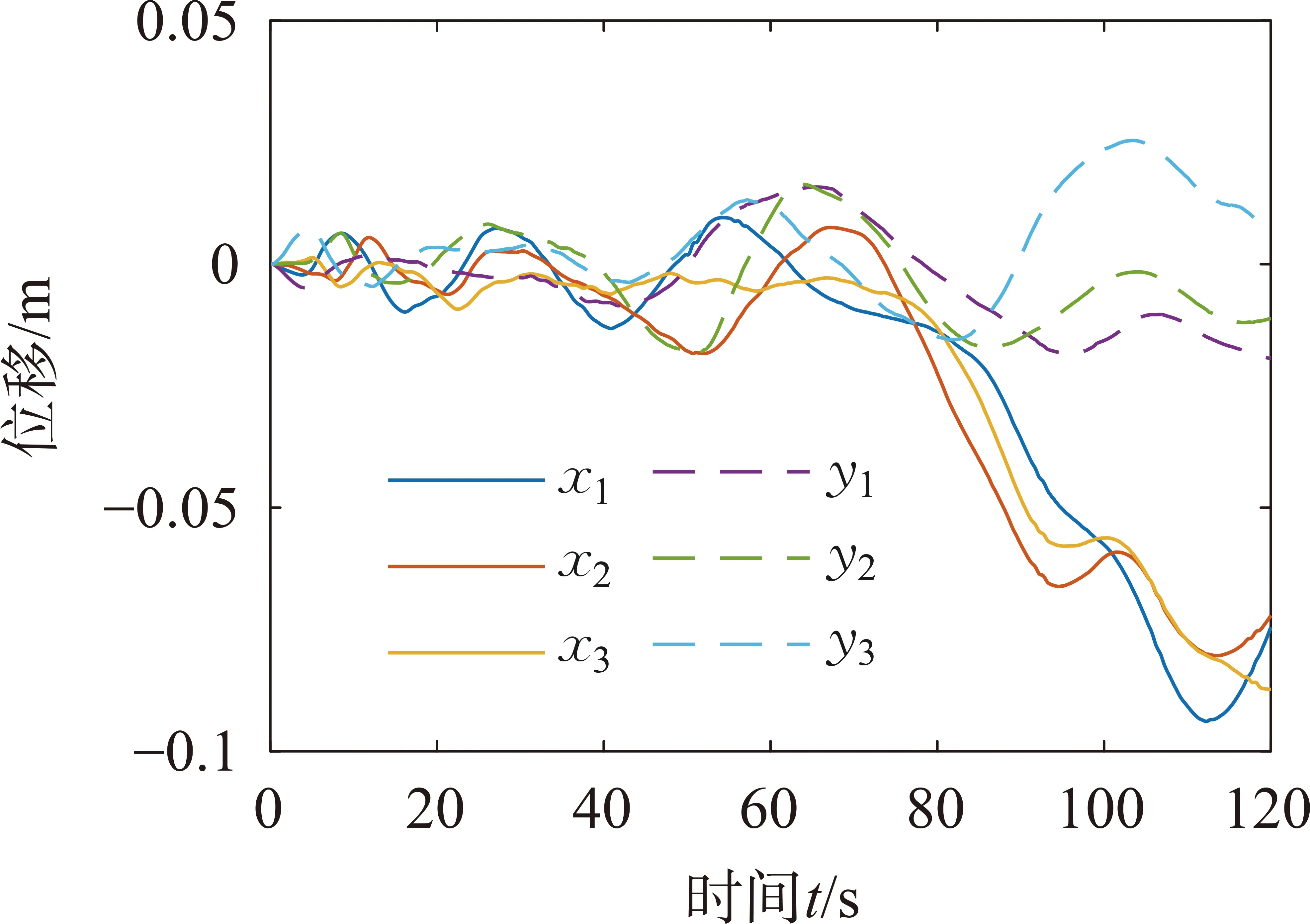
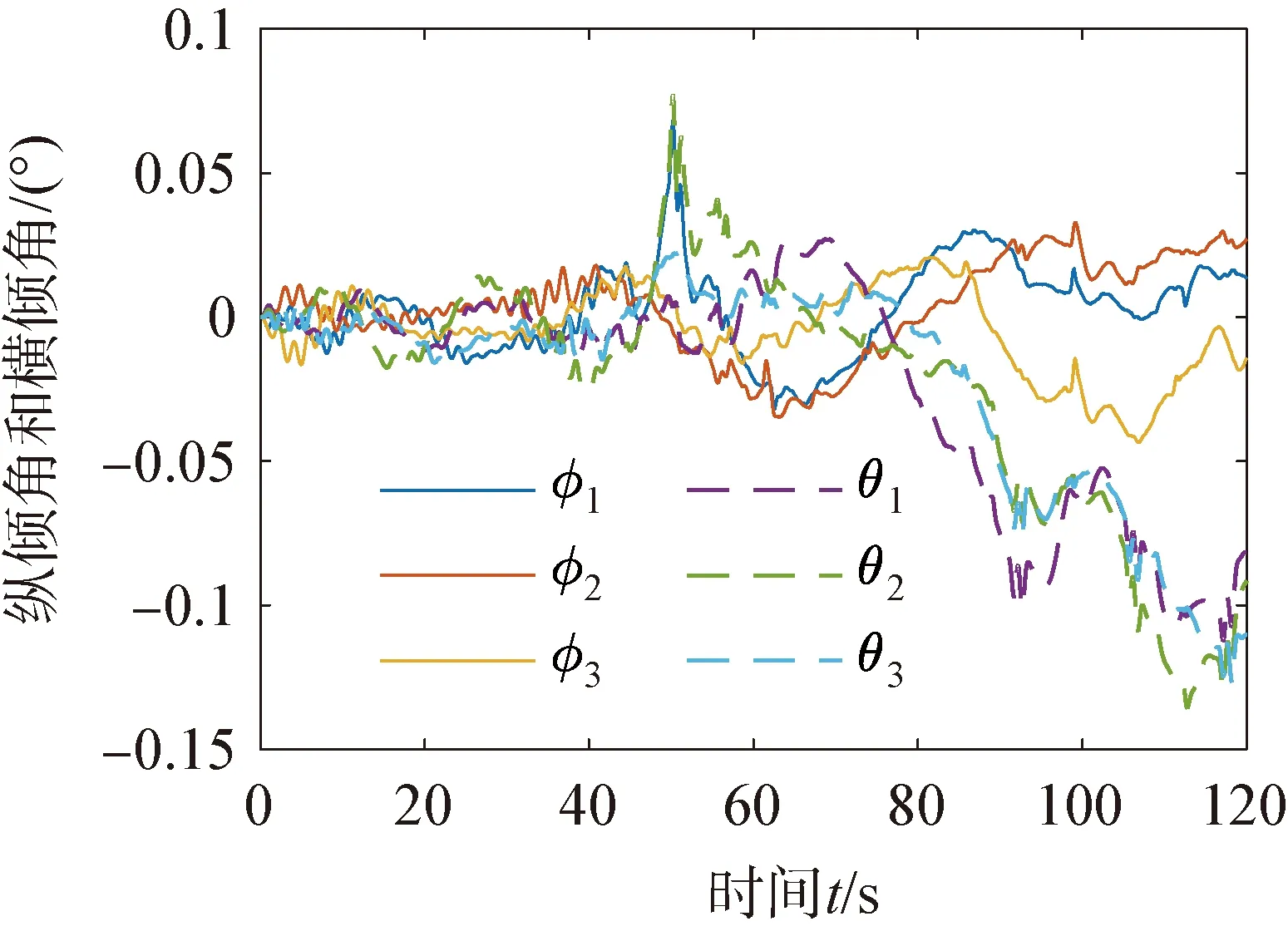
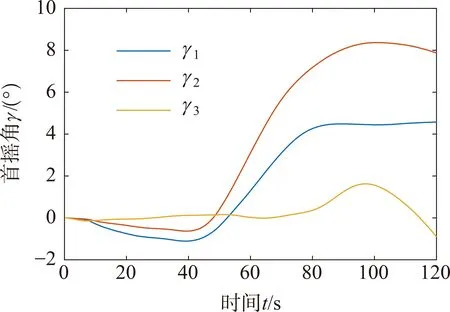
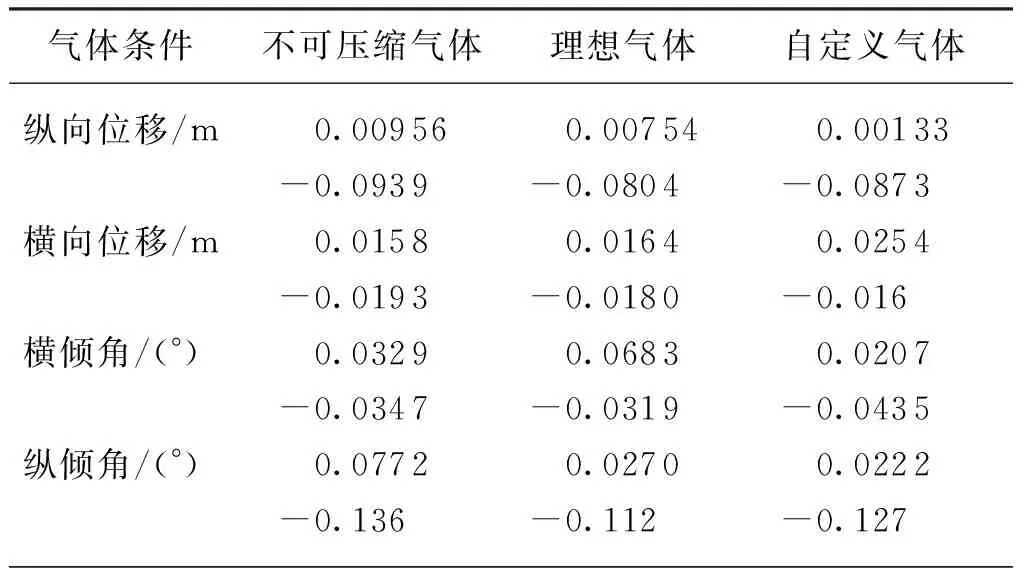
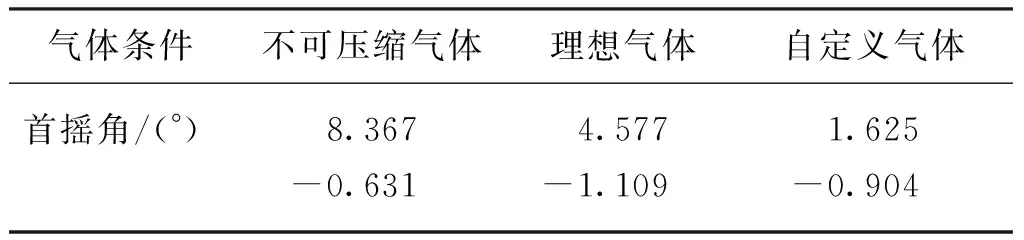
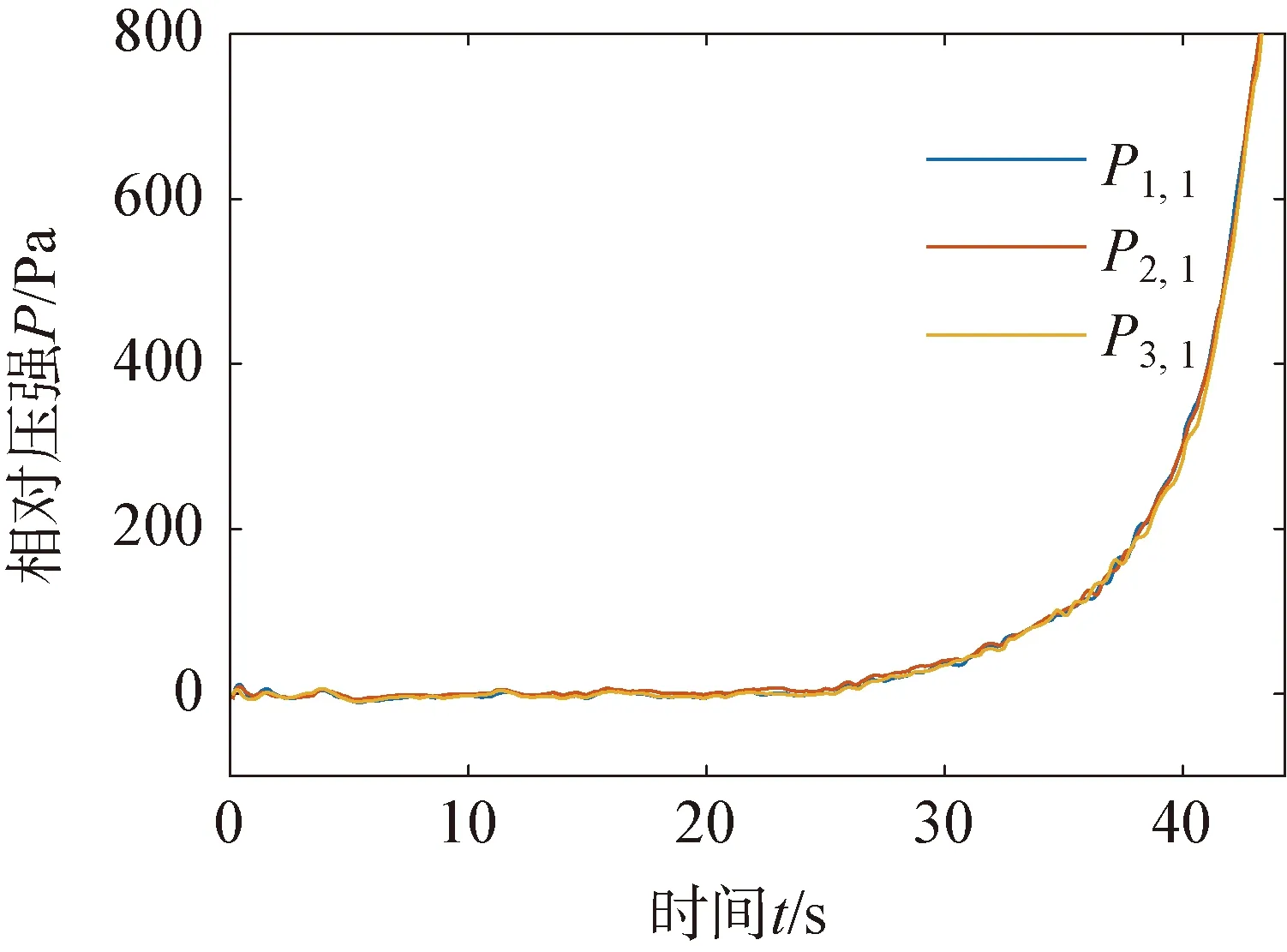
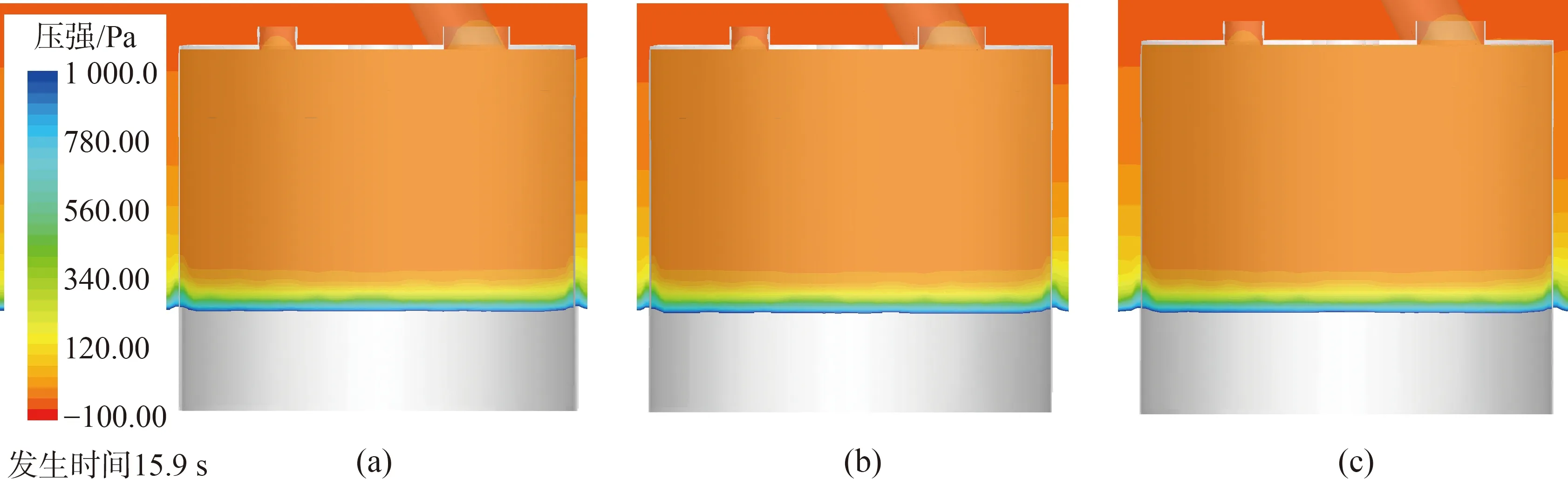
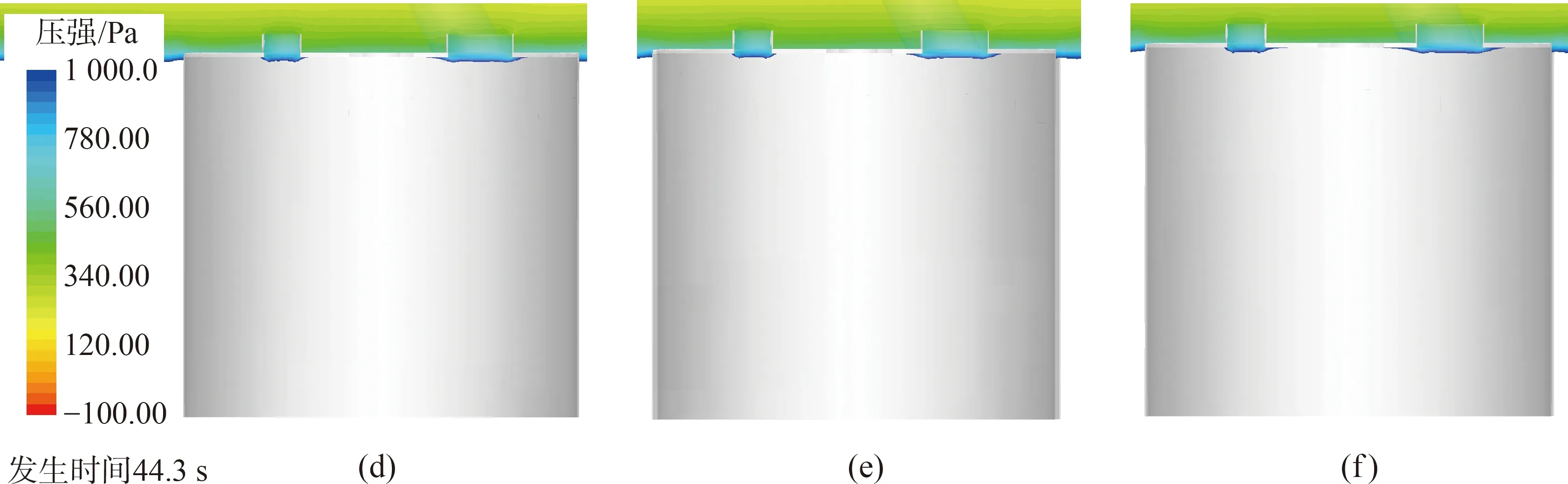
由初始化激活的动网格过度区域和自由液面的自适应网格(adaptive mesh refinement,AMR)如图3(b)所示,网格基准值0.2 m,最小值0.012 5 m,两层边界层网格总厚度为0.07 m,变化率为1.5,y+=337.07,共计3 436 163个网格。应用双层全y+壁面函数(two-layer ally+wall treatment),该方法可以处理y+小于1和大于30的情况,当1 (a) (b) (c) (d) 根据DNVGL规范[18]中的结构物穿过飞溅区受力的简化方法计算吸力锚锚顶触水时缆绳拉力,并与计算结果中的同时刻的拉力进行比较以验证方法的可靠性。锚顶的特征砰击力Fslam,i可取为(i=1,2,3) (8) 其中,一个吸力锚的水平投影面积As=6.792 m2,砰击力系数Cs=2π。砰击速度vs, i从计算的位移实例中获取,不可压缩、理想气体和自定义气体条件下的砰击速度:vs, 3=0.067 6 m/s,vs, 2=0.078 0 m/s和vs, 1=0.067 0 m/s。吸力锚锚顶触水时一个吸力锚的瞬时浮力Fρ, i=76.244 m3,瞬时浮力根据不同吃水时的结构物瞬时浸没体积计算。由于缆绳顶端固定且自由液面为静水,作用在物体上的特征质量力FM,i可取为 FM,i=(ρVi+A33i)·a (9) 式中:Vi为吸力锚的瞬时浸没体积;a为结构物的加速度;A33i为垂向附加适量,其估算方法为 (10) 其中,h为吸力锚的高度,与锚顶等面积的圆形平板的法向附加质量A33o=9 kg。一个吸力锚的拖曳力FDi为 (11) 其中,流速vr,i=vs, i。因为当不考虑水流或下降速度引起的尾波冲刷时,可以得到拖曳力系数在4~8范围内,所以取拖曳力系数CD=8[18]。一个吸力锚的特征水动力Fhyd, i为 (12) 所以缆绳的拉力Ti: Ti=Mg-4(Fhyd, i+Fρ, i) (13) 其中,M为结构物的质量;g为重力加速度。计算结果如下:T1=222 323.062 N,T2=217 980.202 N,T3=222 561.815 N。模拟结果与简化方法的计算结果之间的相对误差均小于8%,所以本研究中的物理模型、参数和网格适用于静水面的吊装作业模拟。 本文利用线性弹簧模拟吊绳,进行吸力锚的飞溅区单吊作业仿真,参考DNVGL规范[18],动态放大系数(DAF)定义如下: (14) 式中:Fstatic为静态载荷,包括吸力锚的重力和吊装过程中各时刻吃水下的瞬时浮力,瞬时浮力根据不同吃水时的结构物瞬时浸没体积计算;Ftotal表示静态载荷与动态载荷之和,本文中表示缆绳拉力。 结构物在下放时,不可压缩气体(DAF1和v1)、理想气体(DAF2和v2)和气体比热比为1.4的气体(DAF3和v3)三个模型的DAF和结构物的垂向运动速度时历如图4所示。从图4中可以看出,随着结构物吃水、附加质量力和拖曳力增加缆绳拉力减小,并产生砰击力;由于结构物从静止突然运动,速度发生震荡,但平均速度为0.07m/s,所以拉力和DAF呈线性变化;在锚顶触水时,引起较大的浮力和附加质量变化,水下投影面积增加,拖曳力快速增大,DAF和结构物速度快速减小。 在锚顶没入水中后,结构物加速下落,而且由于速度的突变,缆绳产生突变载荷,并影响后续下落过程的速度。根据DNVGL规范[18],突变载荷小于拉力的90%时,缆绳不会发生松弛。三种气体条件下的突变载荷分别为Fsnap, 1=206 721.414 N、Fsnap, 2=206 580.239 N和Fsnap, 3=206 593.836 N,均小于重力的16%,所以缆绳并不会发生松弛。 由于锚顶入水后,结构物的拖曳力随投影面积显著增加,而且管架的形状较吸力锚复杂,所以DAF大幅小于第一阶段的幅值并继续近似线性减小;最后,当管架顶端入水时,产生速度和载荷的突变,DAF在管架顶端入水后恒定。 三种气体条件下的DAF曲线吻合得较好,三者的突变载荷和稳定的拉力相差小于1%,所以气体的可压缩条件对于开孔率为3.9%的吸力锚吊装作业缆绳拉力影响较小。在锚顶触水前,可压缩性气体下的速度振荡幅值大于不可压缩条件,在理想气体条件下的速度振幅最大,最大振幅为0.008 m/s;理想气体和自定义气体条件下的速度与不可压缩条件下的速度最大相对误差分别为6.4%和10%,最大速度v1, max=0.087 64 m/s、v2, max=0.087 11 m/s和v3, max=0.091 89 m/s,最小速度v1, min=0.044 99 m/s、v2, min=0.044 98 m/s和v3, min=0.043 55 m/s。 (a) (b) 如图5所示,三种空气模型条件下吸力锚浸没并产生拉力突变的时刻相差小于1%,全部结构物入水耗时的相对差值也小于1%。其中自定义气体条件下吸力锚入水耗时最长,时长为45.03 s;理想气体条件下全部结构物入水耗时最长,时长为103.33 s。当发生突变载荷时,吸力锚已经全部浸入水中并有大量的水从通气孔中射出;发生突变载荷时仍有部分空气从小尺寸的通气口溢出,少部分残留在锚顶下形成空腔,在大尺寸通气孔周围的空气将被困于吸力锚内。 (a) (b) (c) (d) (e) (f) 图6表示结构物的纵向(x)和横向(y)的位移以及倾角,锚顶入水前结构物的位移、纵倾角(θ)和横倾角(φ)发生对称的振荡,而且振幅和周期随时间增加;当气体为可压缩时振荡的峰值出现滞后,自定义的气体条件下的纵向位移呈现非对称变化且振幅较小;锚顶入水后,由于开孔的非对称分布以及由钢架产生的升力的作用,两个方向的位移、纵倾角和横倾角出现非对称变化且出现最大值;理想气体条件下,横倾角和不可压缩条件下的纵倾角出现较大的峰值;在锚顶入水前结构物发生小幅度的首摇,在锚顶入水后,当大量的水从通气孔涌出时,由于其非对称的分布,结构物发生大幅的向右舷的首摇;气体为可压缩条件时最大首摇角较小,而且自定义气体条件的首摇角率先恢复为零,最大位移和欧拉角如表1所示。三种气体条件下最大横向位移0.025 4 m沿+Oy0方向,最大纵向位移-0.093 9 m沿-Ox0方向,均小于宽度的1%,不可压缩条件下的纵向位移大于可压缩气体条件而横向相反;最大横倾角φ=0.068 3°,最大纵倾角θ=-0.136°,最大首摇角γ=8.367°。 (a) (b) (c) 表1 最大位移和最大倾角 (续 表) 如图7所示,为吸力锚顶部下表面圆心处的相对大气压的相对压强时历。随着结构物的吃水增加,吸力锚内部的相对压强逐渐非线性增加。在开孔率为3.9%时,由于吸力锚内外的液面高度差小,吊装速度缓慢,吸力锚内部的空气压缩不明显,不同气体条件对吸力锚内压强的影响较小。在吸力锚穿过飞溅区的初期,内部相对压强较小但存在较大振荡,幅值最大超过10 Pa。如图8所示,由于初期的垂向速度不稳定且液面存在扰动,相对压强出现负值。与其他气体条件相比,理想气体条件下的正压较大负压较小。不同吸力锚内的压强对比如图7(c)和图7(d)所示,在入水初期,4个吸力锚之间的差异较小,在锚顶接近水面时压强的差异增加,3号吸力锚的压强最大,4号吸力锚的压强最小,吸力锚之间的压强差值在锚顶触水时最大为85.685 Pa,为该时刻4号吸力锚内压强的15%。由于垂向速度较小且存在空气的缓冲作用,锚顶触水时压强没有明显的突变峰值,说明在最大投影面积的位置,由水与结构物的突然接触而产生的砰击载荷较小。 (a) (b) (c) (d) 图8 自由液面位置 如图9所示,入水初期气体可压缩与不可压缩条件的压力分布差别较小,吸力锚内部的压强分布从上到下逐渐增加,且高压区域的分布梯度比外界大;当锚顶触水时,在可压缩气体条件下,有更多的空气留在通气孔附近。 图9 不可压缩气体、理想气体和自定义气体的压强分布 本文采用计算流体力学方法对带有四个吸力锚的结构物进行飞溅区单吊作业时缆绳拉力、运动状态和吸力锚内部压强进行分析,分别研究空气为不可压缩条件、理想气体条件和比热比为1.4的自定义气体条件对吊装作业的影响。 结果表明当以全局力为研究重点,在较低速的不会产生缆绳松弛的吊装作业中,为简化计算可视空气为不可压缩气体,但此时对结构物运动状态的估计是保守的;在静水可压缩空气条件下,不同吸力锚由于相对液面运动状态不同,造成水动力以及内部压强的差别较小,所以可进行对称简化。比热比的变化对横向和纵向位移影响较小,但在吸力锚入水初期,比热比增加时,位移的振荡周期增加峰值减小,吸力锚完全入水后较大比热比时的首摇角明显减小,大比热比时吸力锚顶部下方的相对压强较小。本文针对带有吸力锚的结构物,计算所获得的载荷结果、运动和压强的变化规律,可以为将来吸力锚的设计与安装提供指导。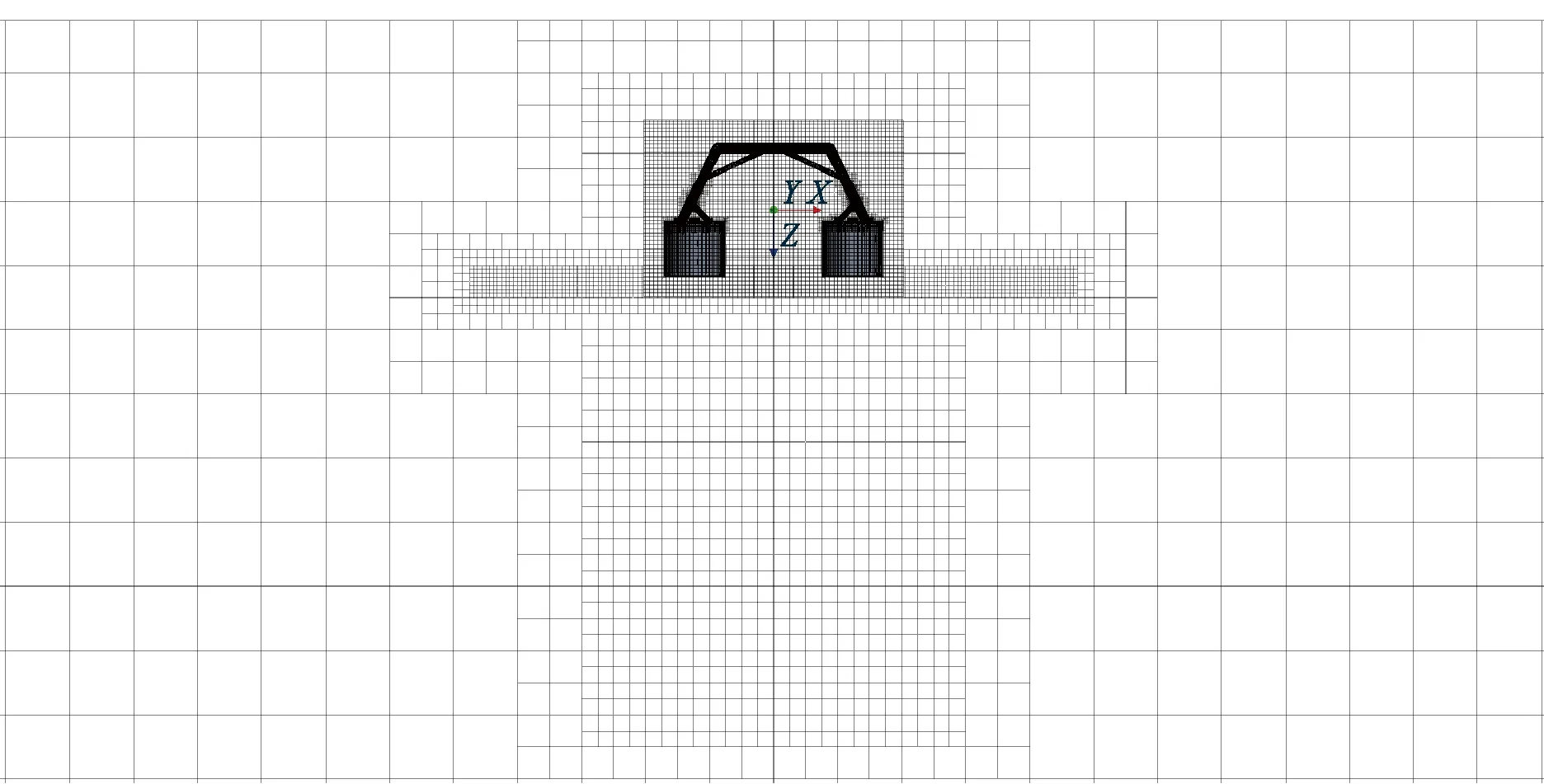

2 仿真结果验证
3 计算结果与分析
3.1 缆绳拉力与吸力锚运动状态

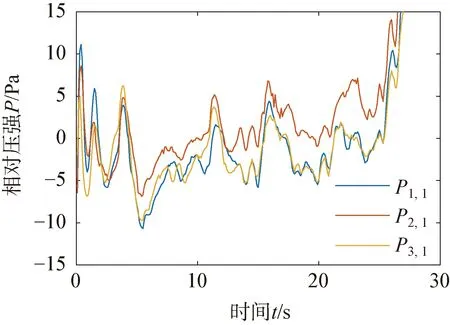
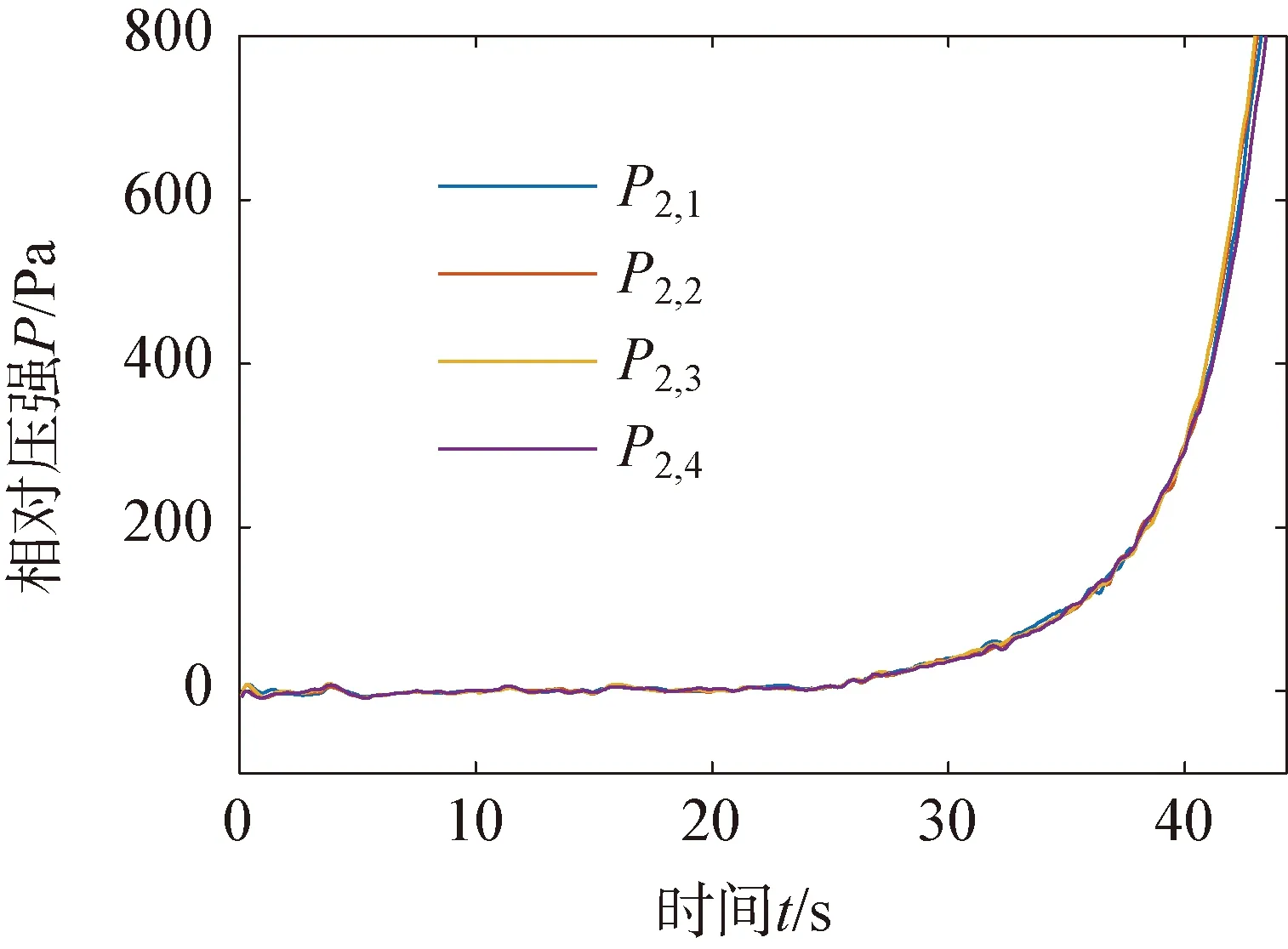
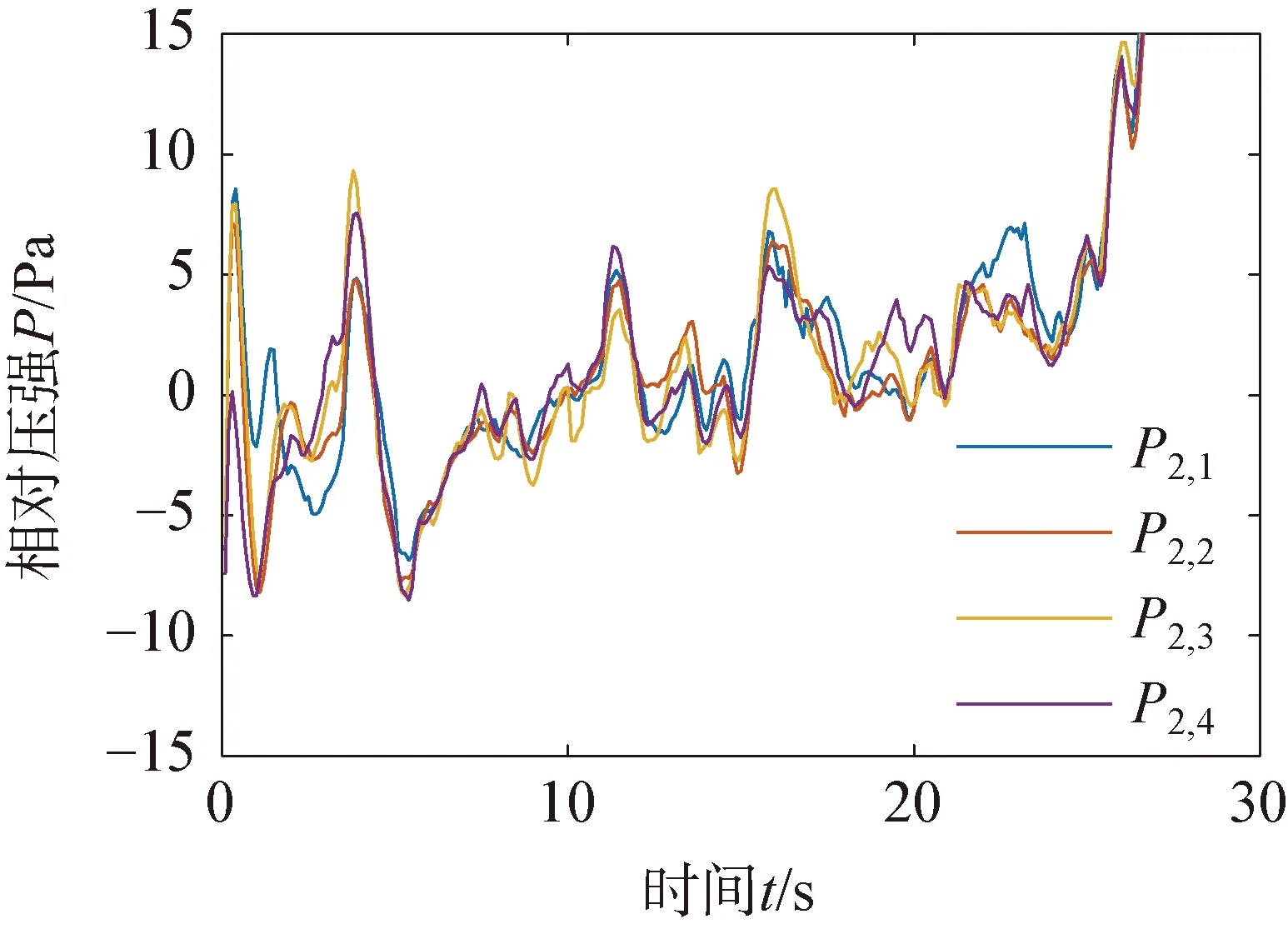
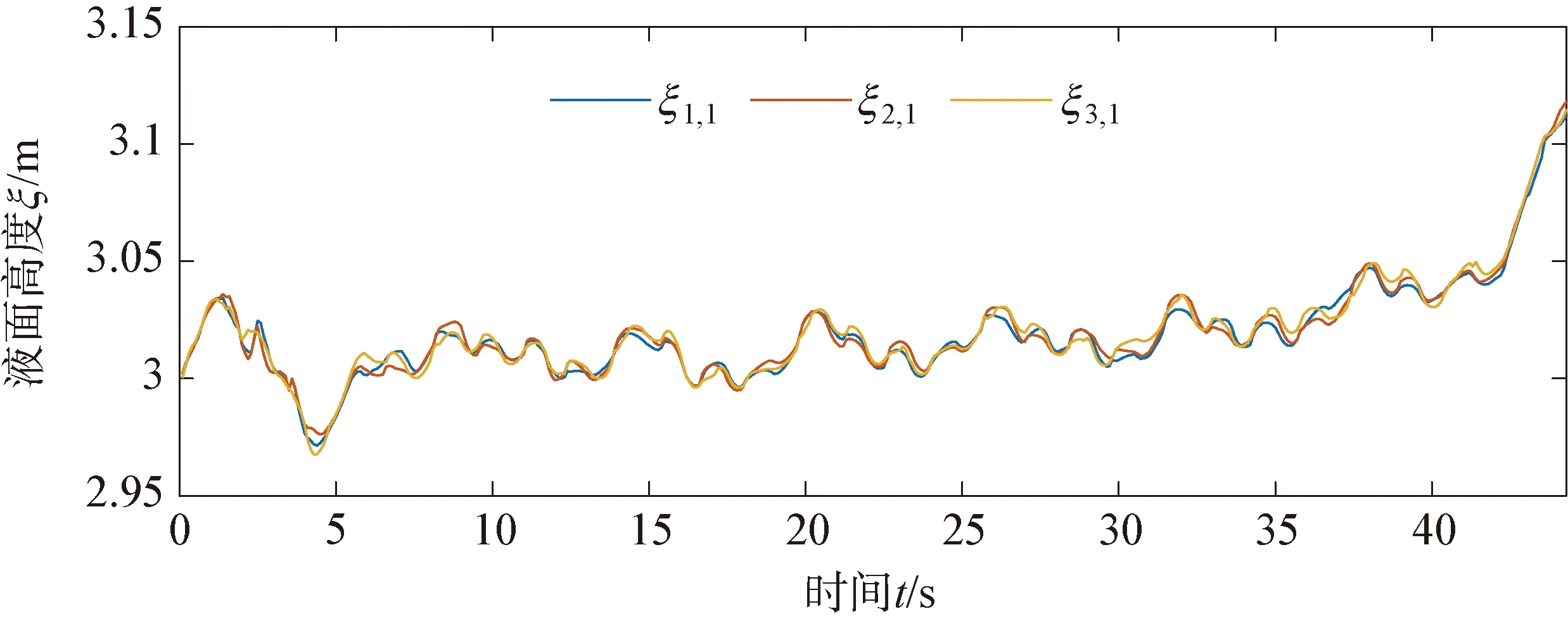
3.2 吸力锚内压强分布
4 结 语
