油菜精量联合直播机深施肥装置设计与试验
2020-03-09廖宜涛高丽萍廖庆喜张青松刘立超付云开
廖宜涛 高丽萍 廖庆喜 张青松 刘立超 付云开
(1.华中农业大学工学院, 武汉 430070; 2.农业农村部长江中下游农业装备重点实验室, 武汉 430070)
0 引言
油菜是我国长江中下游地区主要冬季油料作物,且具有饲、肥、菜、蜜及旅游观花等多种功能用途,其种植模式以水旱交替的稻油轮作为主[1-2]。油菜精量联合直播可一次性完成所有油菜种植工序,是油菜轻简化栽培的重要技术,在促进油菜生长和粮油高产中发挥了重要作用[3-5]。
施肥是油菜种植的重要环节,目前我国直播油菜基肥主要以撒施、浅层混施为主,存在肥料分布不均匀、作物根系吸肥量不一致等问题。研究表明,同等氮肥用量和运筹下,直播油菜通过深施基肥将化肥条施在地表下作物根系密集层,可保证被作物充分吸收,增加干物质积累,提高油菜产量,减少肥料有效成分的挥发和流失,提高肥料利用率[6-7]。直播油菜基肥深度一般控制在80~100 mm,以促进苗期根系生长,满足后期养分需求,同时避免残留过多[8-9]。深施缓控释肥,使肥料养分释放规律与作物生长周期养分吸收需求同步,延长养分供应时间,可提高肥料利用率,减少后期追肥次数,实现油菜轻简化栽培[10-11]。
化肥深施的关键部件是深施肥装置,其主要功能是先分隔表层土壤、秸秆等物料,开出肥沟,将肥料导入指定深度的土层,再由回流土壤进行覆盖。VAMERALI等[12]研制了一种带有宽扫刀的凿式施肥装置,前端凿型铲开出肥沟,后端宽扫刀通过其上侧犁刀切断秸秆,并通过犁刀后端使土壤和玉米秸秆残茬充分混合后回填肥沟。JOHAN和AILI等[13-14]研制一种类弹齿式施肥开沟器,通过土槽试验研究了不同类型铲尖对土壤的扰动、土层碎裂状态及工作阻力的影响。杨然兵等[15]研制了一种马铃薯种植组合式分层施肥开沟器,开沟器前铲入土开沟并对土壤进行切削破碎,V型防堵结构防止回土堵塞出肥口,分土板对肥料进行回土覆盖。祝清震等[16-17]设计了冬小麦基肥分层定深施用装置,实现了分层施肥作业并对出肥口位置与施肥深度关系进行了研究。曾山等[18]研制的同步开沟起垄施肥水稻精量旱穴直播机采用锐角式施肥开沟器开出肥沟,通过拖板刮土覆盖肥沟实现机械定位深施肥。陈雄飞等[19]研制的水田两级排肥装置,采用滑切式水田深施肥开沟器开出肥沟,通过仿形导肥管内的螺旋输送器将肥料施入肥沟内,避免出肥口堵塞。
以上深施肥装置主要适用于旱地或水田作业。长江中下游稻油轮作区前茬作物为水稻,油菜直播农时紧张,土壤因水稻生产季长期浸泡而导致黏重板结,且水稻收获后秸秆残茬量大,现有深施肥装置作业时易出现工作部件黏附土壤、缠绕秸秆,进而导致机具壅土堵塞,影响了机具通过性,难以实现油菜直播深施肥作业。本文基于已在生产中推广应用的2BFQ-6型油菜精量联合直播机[20-21],设计配套的主动式防堵深施肥装置,通过工作原理分析和结构优化设计,确定施肥铲主要结构参数,实现与旋耕刀配合作业、主动刮削,防止施肥铲体挂草堵塞,完成深施肥作业,以满足稻油轮作区油菜种植施肥播种的农艺要求。
1 整机结构与工作原理
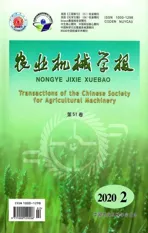
装配深施肥装置的2BFQ-6型油菜精量联合直播机如图1所示,主要由主机架、仿形驱动地轮、排肥系统、排种系统、开畦沟犁、旋耕部件、包络式施肥铲、平土板、双圆盘开沟器等组成,其中包络式施肥铲固定在主机架后梁上,铲体包络旋耕刀片的运动轨迹,利用旋耕刀刮削实现铲体表面防黏附。直播机工作时由拖拉机牵引前进,两侧的前后组合式开畦沟犁开沟;旋耕部件在拖拉机动力输出轴驱动下正旋切削土壤,同时对铲体上的黏附物进行主动刮削、抛撒,避免土壤秸秆在施肥铲面上黏附堆积造成壅土堵塞;施肥铲阻隔碎土,通过包络式腔体引导肥料均匀投放至肥沟,随后通过碎土回流和平土板作用,实现深施肥料覆盖并平整厢面。开沟旋耕深施肥及平土板等工作部件相互配合,形成适宜油菜播种的种床,排种器排出的种子落入双圆盘开沟器在种床上开出的种沟中,完成联合直播作业。
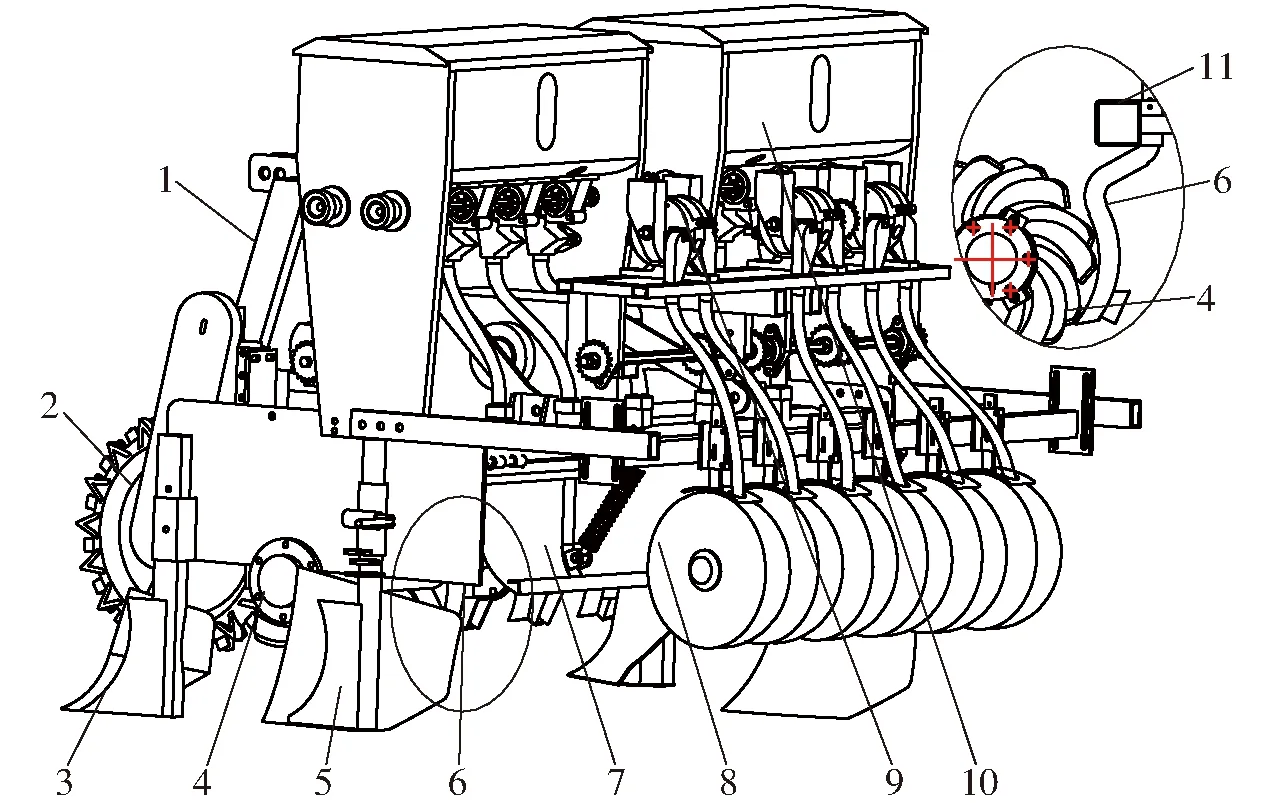
图1 油菜精量联合直播机结构简图
2 深施肥开沟铲体设计与结构参数分析
2.1 施肥铲体结构及参数
包络式施肥铲结构曲线如图2所示,其由入土段ABC、过渡段CD、铲柄段DE组成,D点为机架后梁最低点;工作时,土壤与施肥铲主要接触、发生黏土挂草部位为ABC段,其中AB为入土段,BC为抛土接触段;为实现旋耕刀主动刮削黏附在施肥铲体上的土壤秸秆混合物,ABC段设计为与旋耕刀轴回转中心同心、包络旋耕刀末端运动轨迹的圆弧。AB段根据油菜种植施肥深度要求确定;BC段圆弧的圆心角越大,施肥铲的包络效果越好,黏附缠绕土壤秸秆量越少,但圆心角太大则易导致BC段平缓,影响肥料从铲体内正常流出。
图2 包络式施肥铲体曲线
施肥铲体各参数间结构关系为
(1)
式中H——旋耕刀辊回转中心至旋耕后梁高度,mm
L——旋耕刀辊回转中心至旋耕后梁水平距离,mm
R——施肥铲入土段圆弧半径,mm
HCD——施肥铲过渡段垂直高度,mm
θ2——施肥铲入土段上端圆弧对应圆心角,(°)
θ3——施肥铲过渡段下端圆弧对应圆心角,(°)
d1——施肥铲过渡段下端圆弧直径,mm
θ4——施肥铲过渡段上端圆弧对应圆心角,(°)
d2——施肥铲过渡段上端圆弧直径,mm
由式(1)可知,在参数H、L确定的条件下,入土段上端圆弧圆心角θ2增大,过渡段垂直距离HCD减小,且过渡段与水平面夹角减小,影响肥料颗粒在铲内的流动性;过渡段上端圆弧直径d2增大,其圆心角θ4随之增大,而过渡段下端圆弧直径d1及其圆心角θ3随之减小,易导致肥料颗粒堆积在过渡段下端,不能顺利流出。因此θ2、d1、d2是影响施肥铲包络刮削防堵效果和肥料顺畅流出的重要结构参数。
2.2 入土段结构参数分析
2.2.1圆弧半径
根据油菜播种施肥农艺要求,设计施肥铲拟施肥深度为80~100 mm。为使施肥铲入土圆弧段曲面能与旋耕刀相互配合,使旋耕刀片主动刮削黏附在施肥铲体上的土壤秸秆混合物,实现主动防堵,确定施肥开沟器入土段圆弧圆心与旋耕刀轴回转中心重合,包络半径比旋耕刀轴回转半径增大Δδ。考虑施肥铲与旋耕刀片之间配合作用时刀片末端与工作曲面之间的间隙尽可能小,并避免发生干涉,根据GB/T 5669—2008《旋耕机械 刀和刀座》规定刀柄固定孔中心距偏差极限值为2.0 mm,并根据前期试验确定Δδ=5 mm,即施肥铲入土圆弧段包络半径为R=r+Δδ,r为旋耕刀回转半径。
2.2.2下圆弧圆心角
施肥铲入土部位主要工作曲面为入土段曲面,圆心角θ1、θ2共同确定入土段曲面长度,且圆心角θ1用于确定施肥深度。
施肥铲入土段包络旋耕弯刀运动轨迹,以旋耕刀轴回转中心为圆心、以平行于水平面的回转半径为界,将入土段圆弧所对应圆心角分为θ1、θ2。根据拟定施肥深度与旋耕深度的差值,确定施肥铲A点与旋耕刀回转半径最低点距离m,即可确定圆心角θ1的数值,根据空间力系关系得
(2)
根据油菜播种施肥农艺要求,确定施肥深度为80~100 mm,取目标深度为100 mm,标准旋耕刀IT245回转半径r=245 mm,则m=145 mm,选定Δδ=5 mm,将数值代入式(2)得θ1的取值为23.58°。
2.2.3上圆弧圆心角
入土段上端圆弧圆心角θ2的取值影响肥料在铲体内的流动性及施肥铲作业时的防堵性能。前期研究中为保证肥料流出,设计的施肥铲入土段上端圆弧圆心角θ2较小,试验时发现被切削抛至旋耕机后方的土壤易黏附在铲体上且不断黏带秸秆,旋耕刀片顺铣自下往上刮削黏附在铲体上的土壤秸秆混合物时,出现部分黏附物在过渡段CD处堆积,进而造成机具壅土堵塞;而施肥铲结构参数分析表明,随着θ2增大,施肥铲过渡段CD处直线段与水平面夹角越小,肥料颗粒不能顺利流下,影响施肥均匀性。因此设计的深施肥铲θ2应大于旋耕抛土角,并保证肥料顺利从铲体内流出。
旋耕刀的运动轨迹为余摆线,旋耕部件在工作过程中,旋耕刀端点的绝对运动是整机前进速度vm和旋耕刀角速度ω随刀辊与拖拉机轮同向转动的合成运动[22]。土壤被旋切至斜后方运动受多因素影响,假定土块在被切开后脱离弯刀时,土块脱离旋耕刀刃端点瞬间的绝对速度等于旋耕刀刃端点的绝对速度,土块的运动与相邻土块运动无关,土壤微粒和刀片撞击后,沿与刀片法向偏斜的反射角β′的方向运动,根据文献[22]该角和切削角β的关系为
(3)
(4)
式中f——土壤与刀片的摩擦因数
ky——土壤微粒还原系数
为使土垡均匀抛撒且不影响旋耕机具作业质量,根据文献[23],取土壤微粒还原系数ky=0.4,土壤和刀片的摩擦因数f=0.5,刀片切削角β=60°,代入式(4)可得β′=35.8°。
在不考虑土块之间的碰撞及空气阻力的情况下,被旋耕刀后抛的土块可以看作一个质点,理论上它将做斜上抛运动,如图3所示。设旋耕刀端点转到B点时,土块刚好脱离旋耕刀的约束,将此时土块的绝对速度分别投影到x轴和y轴上。x轴为旋耕刀刃端点切线方向,y轴为旋耕刀刃法线方向。
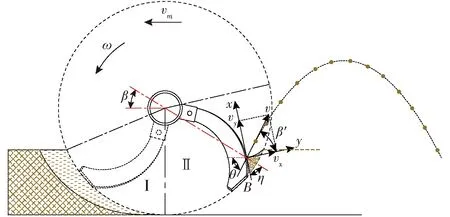
图3 土块运动轨迹
刀刃的静态滑切角η,即螺旋线上某一点的极径与该点切线之间的夹角[24]。由空间力系关系可得
θ=β′+(90-η)-β
(5)
式中θ——土块抛扔角,(°)
根据文献[25]可得,IT245旋耕刀侧切刃上任意点的静态滑切角η=34.4°。代入式(5)得θ=31.4°,根据实际作业需求,设定圆心角θ2最小值为32°。
由前期试验可知,当圆心角θ2超过42°时,肥料颗粒易堆积在铲体过渡段CD位置,使肥料颗粒不能顺利落入肥沟内,影响施肥均匀性;且由前期研究所得[22-23],当旋耕土块抛土角超过45°时影响旋耕机构的土壤抛撒特性,为避免土块不能顺利抛出堆积在旋耕机处,影响机具的作业性能、通过性及厢面平整度,综合考虑取圆心角θ2最大值为46°。
2.3 过渡段圆弧直径参数分析
在已知定位参数旋耕刀辊回转中心至旋耕后梁高度H、水平距离L及入土段上端圆弧圆心角θ2取值范围,以及施肥铲安装不发生干涉的条件下,若过渡段圆弧直径d1、d2为定值,当圆心角θ2适当增大,旋耕刀片刮削黏附在铲体上的土壤时,土壤不易堆积在铲柄处,有利于实现主动防堵,但过渡段趋于平缓,影响肥料颗粒的流动性;若圆心角θ2一定,随过渡段圆弧直径d1、d2的增大,过渡段直线段将不断缩短且趋于与水平面平行,同样影响肥料颗粒在铲内的流动性。铲体的截面为47 mm×35 mm,在考虑施肥铲体截面尺寸条件下最小折弯半径,选取过渡段CD圆弧直径d1、d2的下限值分别为50 mm和80 mm。为保证肥料颗粒在进入施肥铲内后不发生堆积、堵塞现象,顺利落入肥沟完成施肥作业,由前期测定肥料颗粒(湖北宜施壮农业科技有限公司,油菜专用缓释肥)的最小静摩擦角为18°,当圆心角θ2取46°、过渡段CD圆弧上端直径d2取80 mm时,过渡段CD圆弧下端直径d1取120 mm时过渡段CD处直线段与水平面的夹角为17.84°,则过渡段圆弧上端直径d2的取值范围为80~120 mm,下端圆弧直径d1取值范围为50~130 mm。
3 施肥结构仿真优化
3.1 优化设计数学模型
由施肥铲结构设计分析可知,过渡段CD两处圆弧直径d1、d2和入土段ABC上端圆弧圆心角θ2是影响施肥铲防堵性能及肥料颗粒流动性的重要参数,施肥铲的结构设计应该在满足刮削防堵条件下保证肥料颗粒在铲内的运动流畅。以施肥铲末端肥料颗粒垂直于水平方向的流出速度vz最大为优化目标,令设计变量X=(θ2,d2,d1)=(x1,x2,x3),建立施肥铲优化设计数学模型
(6)
肥料颗粒由施肥管连接口进入施肥铲体,由出肥口流出,颗粒动能受肥料间碰撞、肥料颗粒与铲内壁摩擦及碰撞等影响,通过理论分析难以建立目标函数,因此采用离散元仿真分析方法模拟肥料颗粒在施肥铲内的流动过程,以施肥铲体入土段上端圆弧圆心角θ2、过渡段圆弧直径d1和d2为试验因素x1、x2和x3,以vz为响应指标,开展二次回归正交旋转组合试验,分析各设计关键参数改变时对肥料颗粒流动速度的影响,建立vz与各设计关键参数之间的回归方程,用于施肥铲结构优化设计。
3.2 肥料流动过程离散元仿真模型
3.2.1仿真模型
为保证仿真分析的准确性,按照1∶1的比例,采用Creo 4.0建立试验用包络式施肥铲的三维结构模型。其中,肥料属于类球型颗粒,其球形度在88%以上,因此仿真模型可用球体代替肥料颗粒[26-27],设置其密度为1 357 kg/m3,等效直径3.7 mm,泊松比0.25,剪切模量3.48×107Pa,采用正态分布方式生成仿真颗粒6×104粒,生成速度为3×104颗/s,将参数Mean设置为1,即正态分布的肥料颗粒平均直径为肥料颗粒模型直径,标准差设置为0.05 mm。颗粒生成模块定义为Virtual(虚拟体),可保证生成的肥料颗粒只在重力作用下沿管壁下落,仿真总时长6 s。根据排肥系统作业原理,依据实际作业情况为外槽轮式排肥器,添加线性旋转运动(Linear rotation),设置转速为30 r/min。
由于肥料颗粒的碰撞不是瞬时的,而是多个颗粒同时碰撞,因此选择Hertz-Mindlin(no-slip)无滑动接触力学模型作为肥料颗粒与颗粒、颗粒与几何体的接触模型,根据文献[27]以及试验修正,肥料颗粒-肥料颗粒、外槽轮-肥料颗粒、铲体内壁-肥料颗粒接触仿真参数如表1所示。
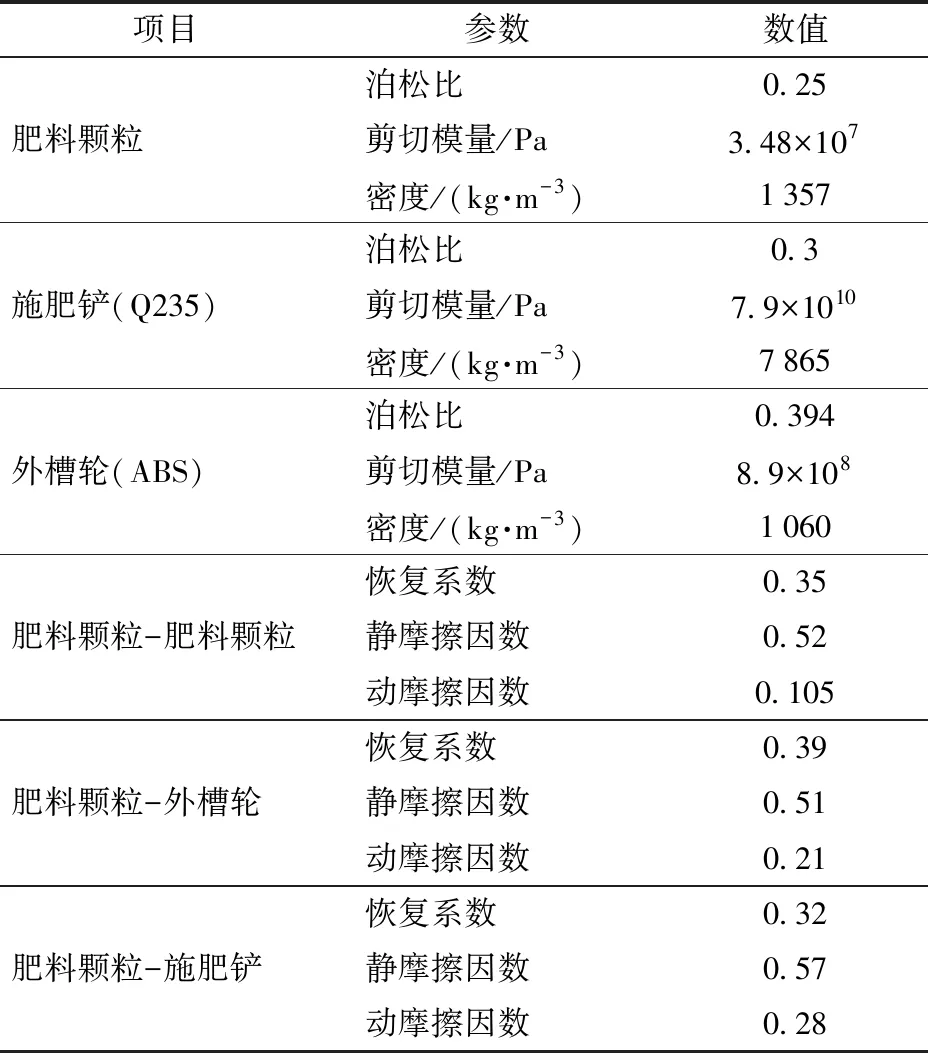
表1 物性及接触参数
3.2.2仿真模型参数的验证
为验证仿真模型参数,设计肥料颗粒流动的台架和仿真对比试验。将前期设计的施肥铲固定试验台架上,使其出肥口离地面高度为100 mm,随机取240粒肥料颗粒从施肥铲顶端释放,测量从出肥口流出的肥料颗粒落地距离,以相同条件开展模拟仿真,试验各重复3次,试验结果如图4所示。台架试验和仿真试验测得的肥料颗粒落地距离的概率分布曲线基本一致;台架试验肥料颗粒落地距离平均值为89.52 mm,其标准差为48.70 mm;仿真试验落地距离平均值为81.93 mm,其标准差为47.90 mm;二者相差7.59 mm,相对误差为8.48%,仿真结果接近台架试验,表明试验测定的EDEM仿真参数有效。
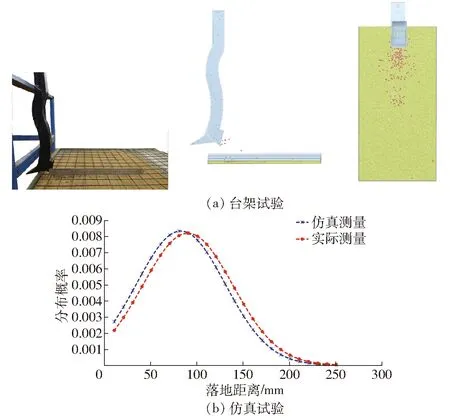
图4 肥料颗粒流动台架试验与仿真试验
3.3 旋转回归正交仿真试验
3.3.1试验设计
采用三因素五水平二次正交旋转中心组合优化设计,以θ2、d1、d2作为试验因素,以肥料颗粒垂直于网格箱体的瞬时速度的平均值vz作为响应指标。为获取vz,在EDEM后处理Selection模块中在出肥口处创建一个平行于水平面的四方体Grid Bin Group网格箱体并设置其高度为5 mm,提取每粒肥料颗粒通过施肥铲末端的瞬时速度并统计。根据施肥铲结构分析,确定入土段上端圆弧圆心角θ2范围为32°~46°、过渡段上圆弧直径d2范围为80~120 mm、过渡段下圆弧直径d1范围为50~130 mm,因素编码如表2所示。
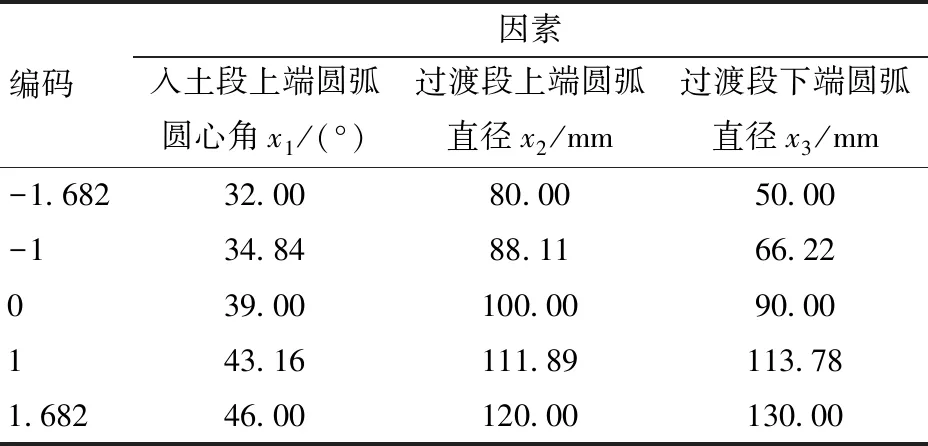
表2 因素编码
3.3.2试验结果与分析
根据三因素五水平正交旋转组合试验方案,共实施20组响应面分析试验,每组试验重复进行3次,取3次测试结果的平均值作为试验结果,如表3所示,X1、X2、X3为因素编码值。
运用数据处理软件Design-Expert 11.0.4对试验数据进行多元回归拟合,得肥料颗粒出肥口处垂直于水平方向速度的二次回归模型为

(7)
对二次回归模型进行方差分析和回归系数显著性检验,结果如表4所示。
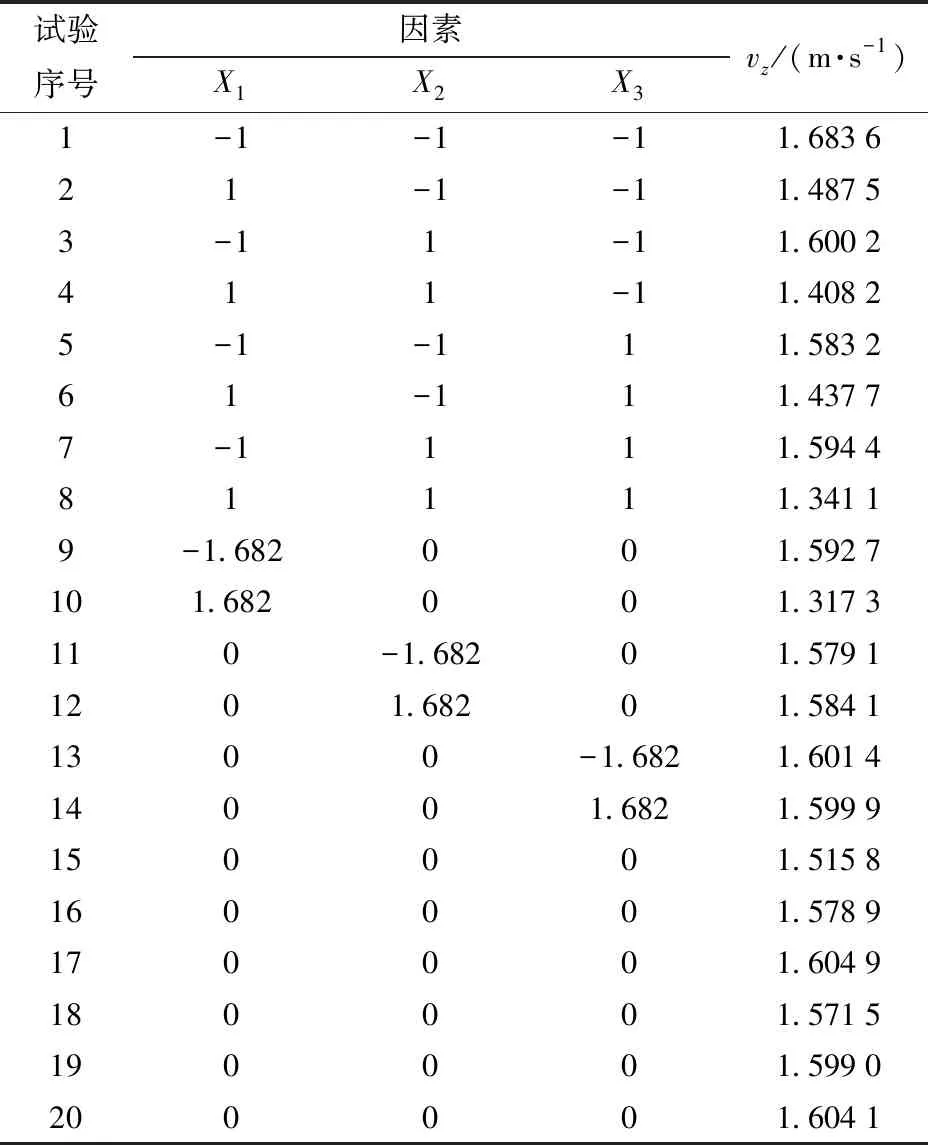
表3 二次正交旋转组合试验方案与结果
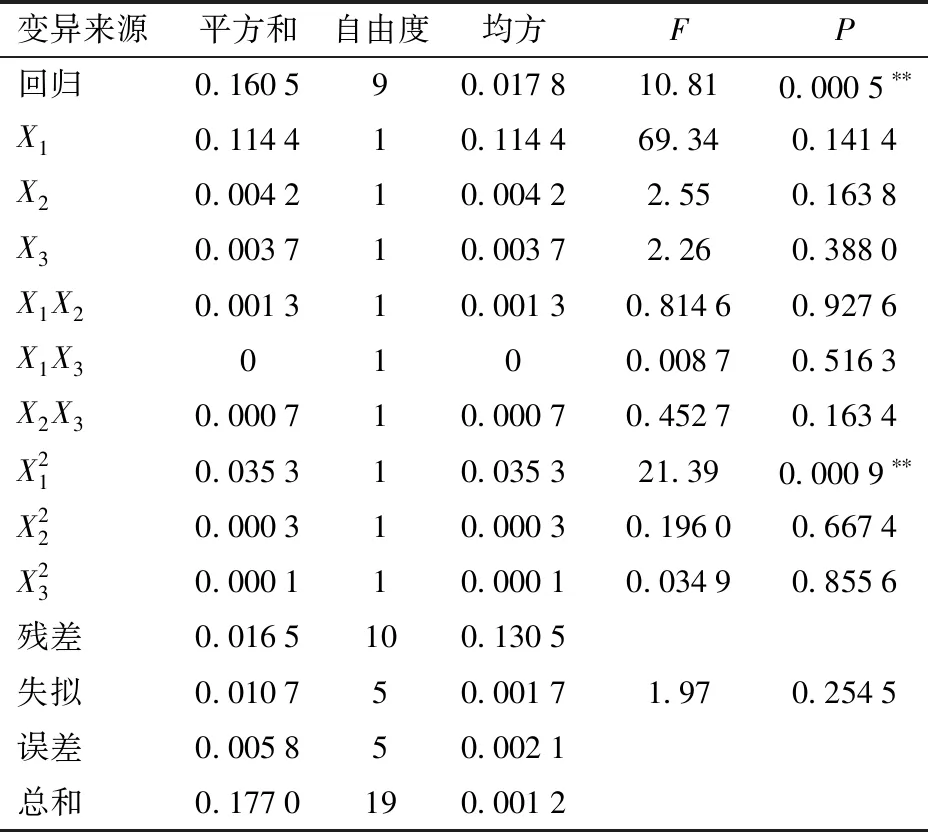
表4 回归方差分析
注:** 表示差异极显著(P<0.01)。

3.3.3肥料流动过程分析
肥料颗粒在施肥铲内流动受颗粒间碰撞以及与铲壁摩擦和碰撞等作用的影响。在EDEM后处理中以肥料颗粒的流动速度为指标,为肥料颗粒添加颜色标识,肥料颗粒在铲内流动时速度的变化状态如图5所示。由肥料颗粒在铲内流动时颜色的变化可知,运动过程中受摩擦力和种群间作用力影响时肥料颗粒速度会有上下波动,而肥料颗粒与铲体内壁发生非弹性碰撞的瞬间,肥料颗粒的动能损失速度急剧减小,完成碰撞肥料颗粒离开铲壁后,肥料颗粒在重力作用下速度逐渐增大。
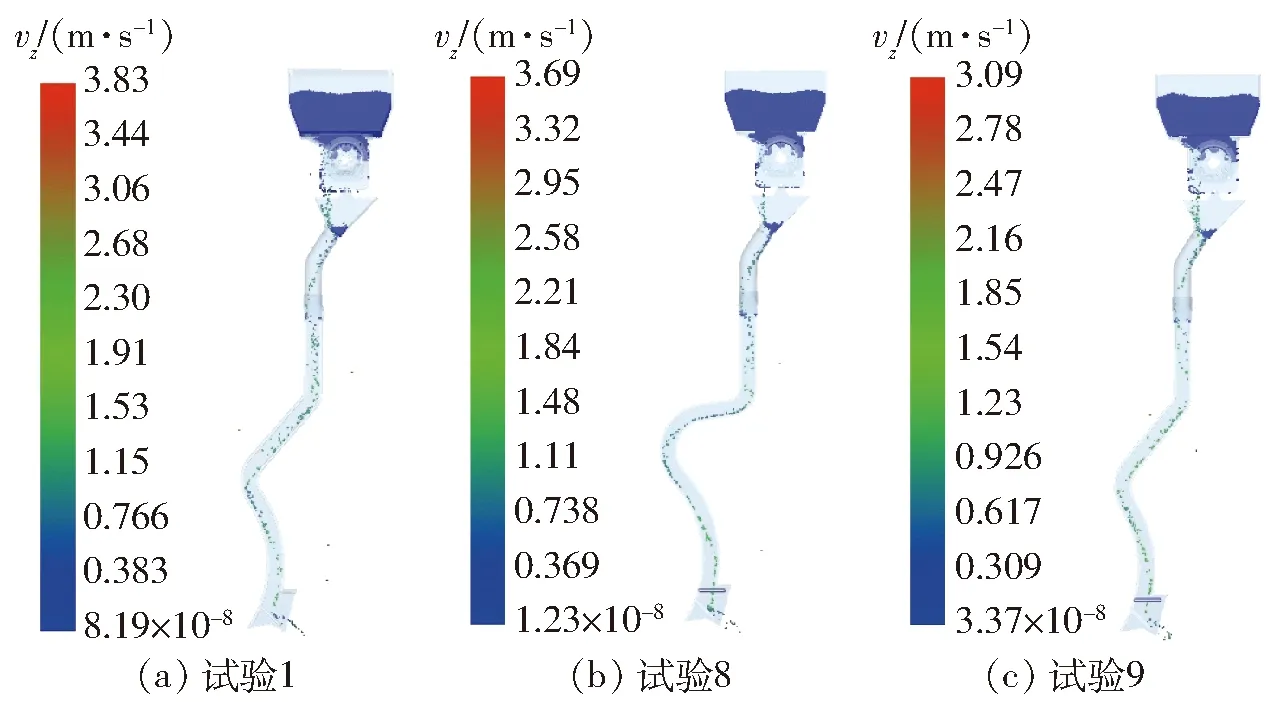
图5 不同组合下肥料颗粒速度变化状态
为进一步分析肥料颗粒速度及动能在铲内流动时的变化情况,选取试验序号为1(-1,-1,-1)、8(1,1,1)、9(-1.682,0,0)的3组仿真数据,在各组随机选取10粒落入施肥铲并从出肥口流出的肥料颗粒,统计其平均速度数据,获得肥料颗粒群体平均速度与时间关系曲线,如图6所示。
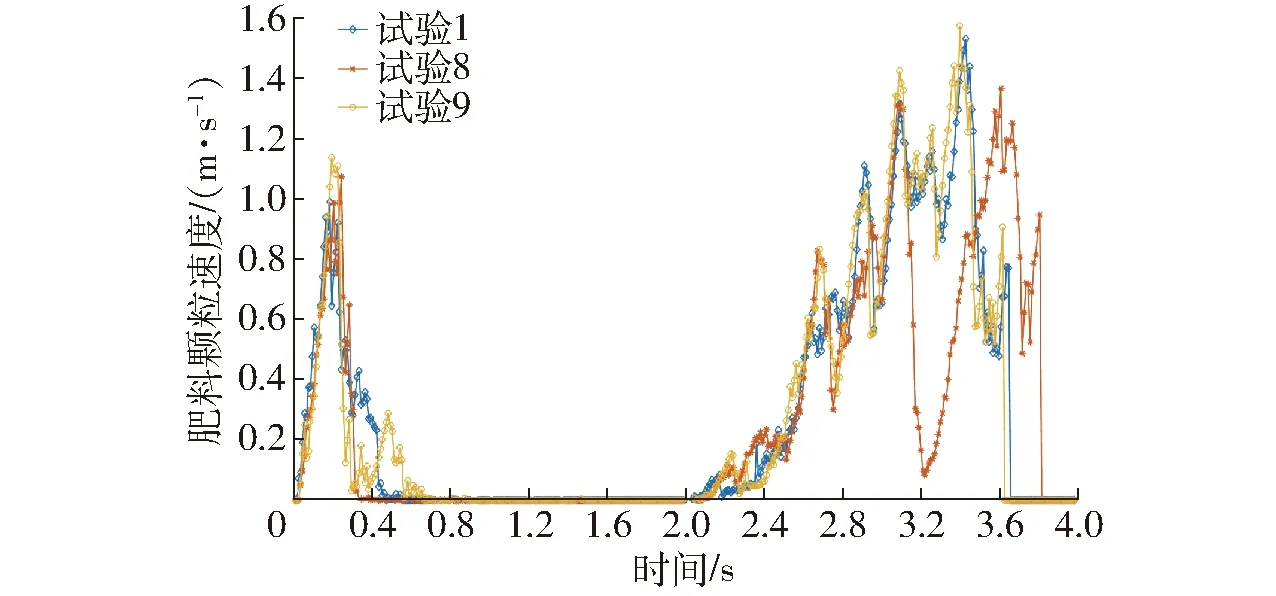
图6 肥料颗粒群体平均速度与时间的关系曲线

图7 稳定阶段肥料颗粒速度与时间关系曲线
由图6可知,时间以2 s为分界点,2 s前为肥料颗粒生成过程。肥料颗粒生成时受重力作用,向肥箱底部下落时速度不断增大,随着肥料颗粒不断堆积平均速度减小,落入肥箱底部时速度为零;2 s时排肥器开始转动,肥料颗粒下落并进入导肥管,约3 s时再运动至施肥铲。在施肥铲内受重力、摩擦力、颗粒间碰撞、颗粒与管壁碰撞等因素影响速度发生变化;不同参数的施肥铲中肥料颗粒运动速度变化不同,取肥料颗粒进入施肥铲后的运动参数进行分析,如图7所示。图中①、②、③、④分别表示肥料颗粒与过渡段上端圆弧、过渡段下端圆弧、施肥铲入土段及出肥口处导流板发生碰撞、流向变化的时间节点。
约在3.0 s时,肥料颗粒运动至铲柄段。约在3.1 s时,肥料颗粒落入过渡段上端圆弧处,与铲体内壁随机碰撞后变向(点①),沿过渡段流动。施肥铲入土段上端圆弧圆心角θ2越大,过渡段与水平方向夹角约小,颗粒在此处的动能损失越大,流动速度越小,且肥料颗粒在过渡段运动加速度减小,导致肥料颗粒流出施肥铲的时间增加;图中试验8的施肥铲入土段上端圆弧圆心角θ2取上水平值,因此其运动速度低于试验1和试验9,且肥料颗粒在施肥铲内运动的时间长于试验1和试验9。
约在3.2 s后,试验8中肥料颗粒速度下降至最低(点②),而试验1和9中肥料颗粒约在3.3 s时速度下降至最低,其原因是试验8施肥铲的过渡段下端圆弧直径较大,肥料颗粒较早进入该铲体过渡段下端圆弧,与铲内壁发生碰撞,速度下降;而试验1和试验9的圆弧直径较小,肥料颗粒仍然在过渡段倾斜向下运动,速度持续增加。肥料颗粒在下圆弧过渡段碰撞减速后变向(点③),由下圆弧段流出,速度在重力作用下增大;进入施肥铲入土圆弧段后,在重力及铲内壁碰撞的影响下,速度出现随机波动,整体呈减速趋势,流向出肥口;与出肥口处导流板碰撞反弹下落(点④),至弹出仿真边界后速度为零。
3.4 试验因素影响效应分析
根据式(7)得到各因素交互作用对肥料颗粒速度的响应曲面图[28],如图8所示。
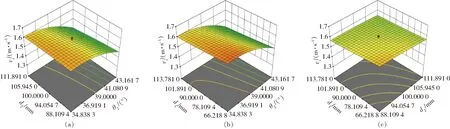
图8 交互因素对肥料颗粒速度的响应曲面
由图8a、8b可知,θ2的变化相较于d1和d2对出肥口处肥料颗粒速度的影响较大。d1和d2一定时随θ2的增大,vz呈先增后减趋势,产生该现象的主要原因是当定位参数H与L确定时,θ2越大,施肥铲体过渡段整体越为平缓,过渡段中间直线斜率越小,肥料颗粒由铲柄进入过渡段时易堆积于该位置,影响肥料颗粒在铲内流动性。
由图8c可知,当θ2处于零水平(39°),d1、d2分别位于66~84 mm和88~100 mm范围内时肥料颗粒的流动速度较快,且两项交互作用对肥料颗粒速度的影响不显著,与方差分析结果相同。
肥料颗粒流动速度反映施肥铲工作性能,为保证施肥装置工作时颗粒肥料能顺利流出,在试验范围内要求流动速度尽可能大,应用Design-Expert 11.0.4软件中Optimization-Graphical模块对回归方程模型进行该目标下优化求解,得到施肥铲体各影响因素最优组合参数范围如图9所示,响应指标速度最大时最优解为:X1=36.155 2、X2=93.083 6、X3=66.218 8。选取优化设计参数:θ2=36°、d2=93 mm、d1=66 mm。
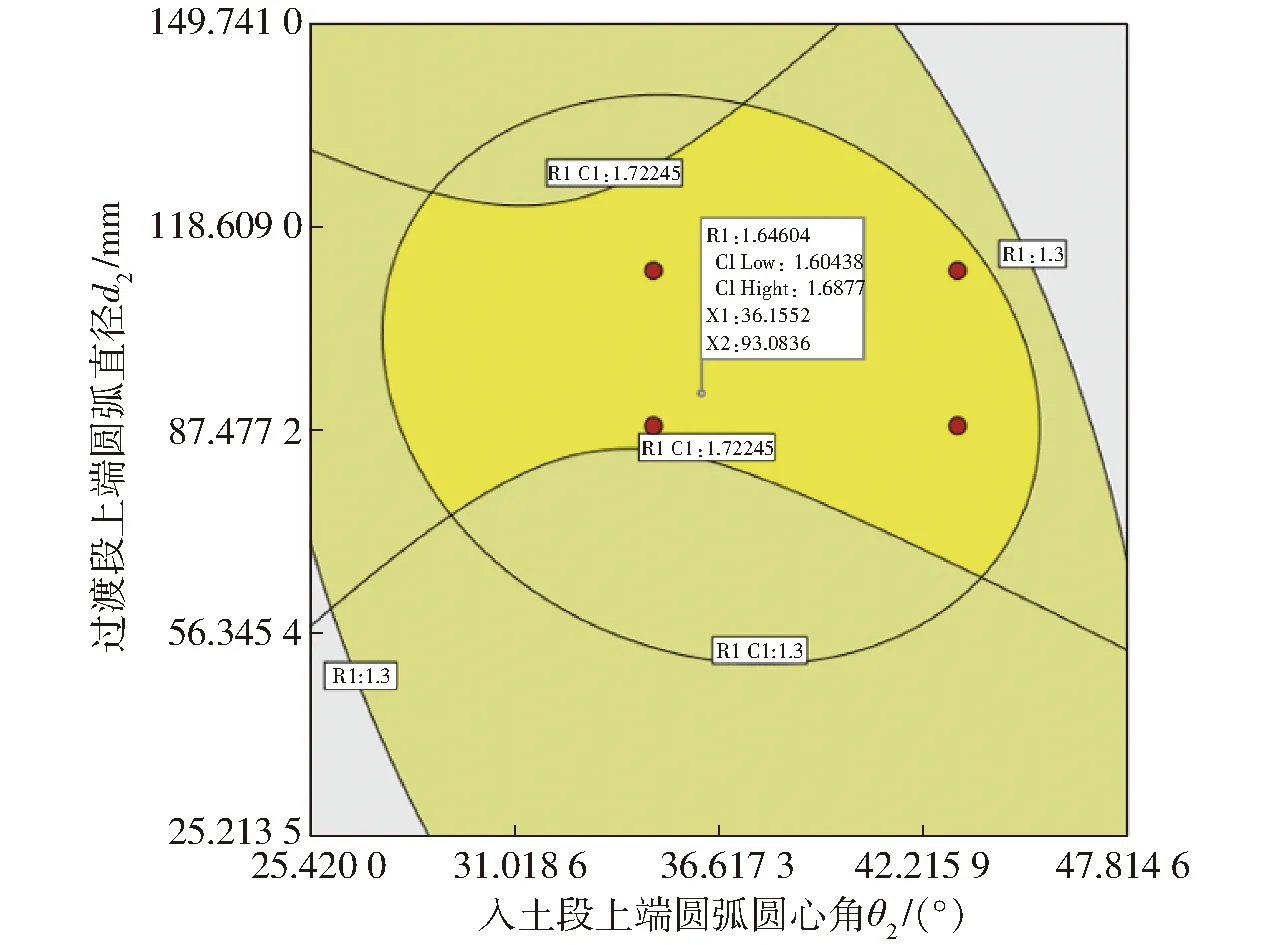
图9 优化参数分析图
4 田间试验
4.1 土壤黏附量
为验证优化设计结果,分别于2019年9月23日、10月12日在华中农业大学现代农业科技试验基地和湖北省监利县华中农业大学稻油轮作全程机械化生产示范基地开展田间试验。试验地表为全喂入联合收获机收获后稻茬田,土壤类型为黄棕壤,试验前未对地表残茬进行清理,田块特性参数见表5。配套动力为东方红954型拖拉机,机组以慢Ⅱ挡作业,通过预试验确定拖拉机液压手柄位置与机具旋耕深度的关系,调节油门使发动机以额定转速工作,保证作业速度一致。试验机组沿直线方向每厢作业距离为50 m,当机组每工作到预定长度后将黏附在各个铲体的土壤秸秆混合物刮下装入自封袋中称量,每组试验重复3次取其平均值,对应试验铲标号和黏附量测量结果如图10所示,作业后的地表状态及铲体黏附形态如图11所示。
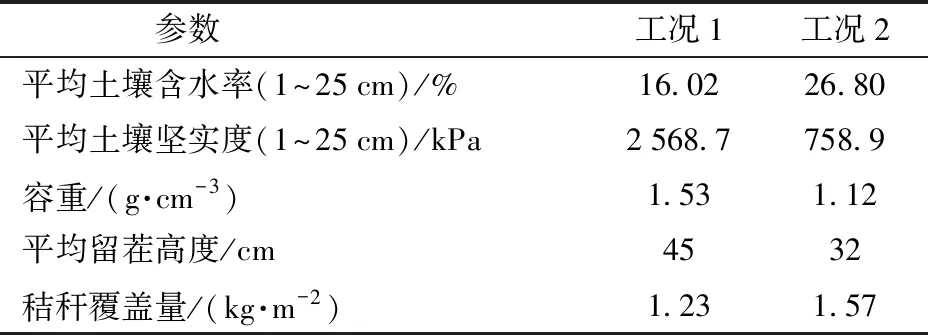
表5 田块特性参数

图10 两种工况下铲体土壤黏附量
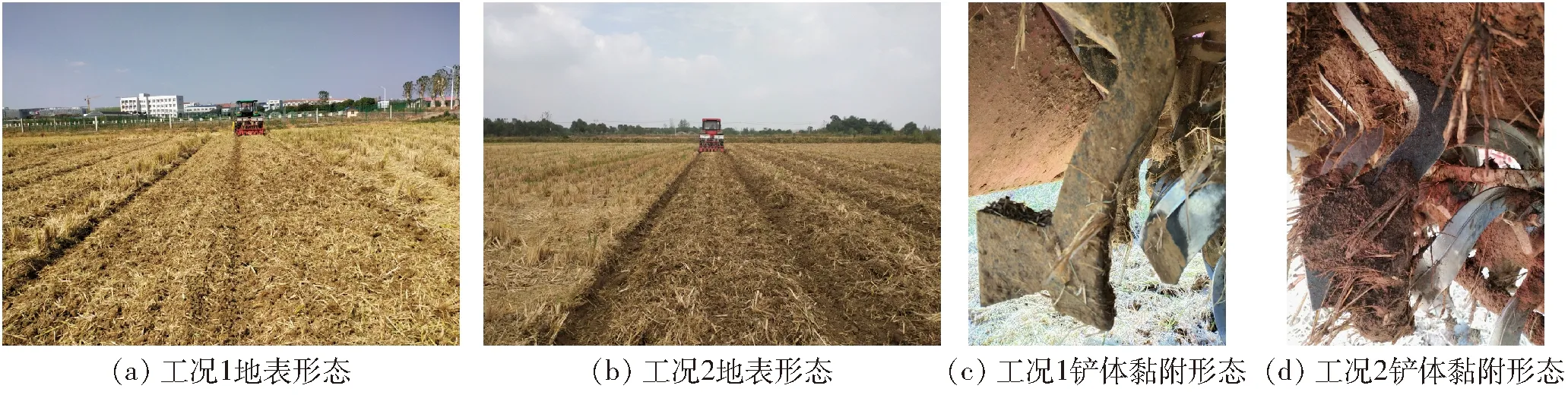
图11 两种工况作业后地表及铲体黏附形态
由测定的黏附量和施肥铲黏附形态可知,铲体出现了适度黏附,特别是土壤含水率较高、秸秆量较大情况下,黏附量会增大。从地表形态看,未出现壅土、拖沟等情况,表明机具的通过性良好。当机具工作长度为150~250 m时铲体土壤黏附出现最大值,随工作长度的增加,黏附量下降,单个铲体黏附量保持在1.5 kg以下,并存在随机的波动;表明施肥铲包络旋耕刀,但留有间隙,土壤秸秆混合物会黏附在铲体上,累积到一定量后,依据工作原理旋耕刀会主动刮走黏附在铲体上的土壤秸秆混合物,保证机具正常作业。试验发现黏附主要集中在铲尖部位,铲体与土壤、秸秆发生摩擦、挤压,在铲尖形成一层不易脱落的土壤秸秆混合黏附层,包裹住铲尖一部分,在机具作业过程中,黏附层代替铲尖与土壤耕层进行开沟作业,可避免铲尖磨损。
4.2 施肥深度合格率及断条率
根据行业标准NY/T 1003—2006《施肥机械质量评价技术规范》,在同一厢面内选取5个点,每个点长度为5 m,人工扒开土层测量施肥深度及断条长度,每组试验重复3次,对肥料条带的位置深度数据进行整理,结果为:目标施肥深度100 mm,施肥深度平均值91.10 mm,施肥深度误差8.90 mm,施肥深度标准差5.60 mm,施肥深度合格率93.33%,施肥深度变异系数6.16%,施肥断条率1.08%。肥料颗粒实际施用深度平均为91.10 mm,肥带宽度平均为43.50 mm,满足油菜深施肥农艺要求;施肥深度合格率93.33%,施肥断条率为1.08%,满足NY/T 1003—2006《施肥机械质量评价技术规范》作业性能指标,有效实现了深施肥功能,试验效果如图12所示。
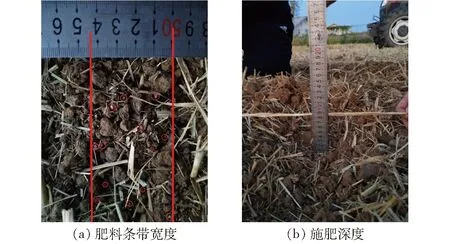
图12 施肥铲施肥效果
4.3 厢面平整度
利用地表微地貌测量装置[29],在拖拉机1.8、2.3 km/h速度作业后的地表分别选取3个测量点,测量该处厢面平整度,测量装置及作业效果如图13a所示,测量数据如表6所示。
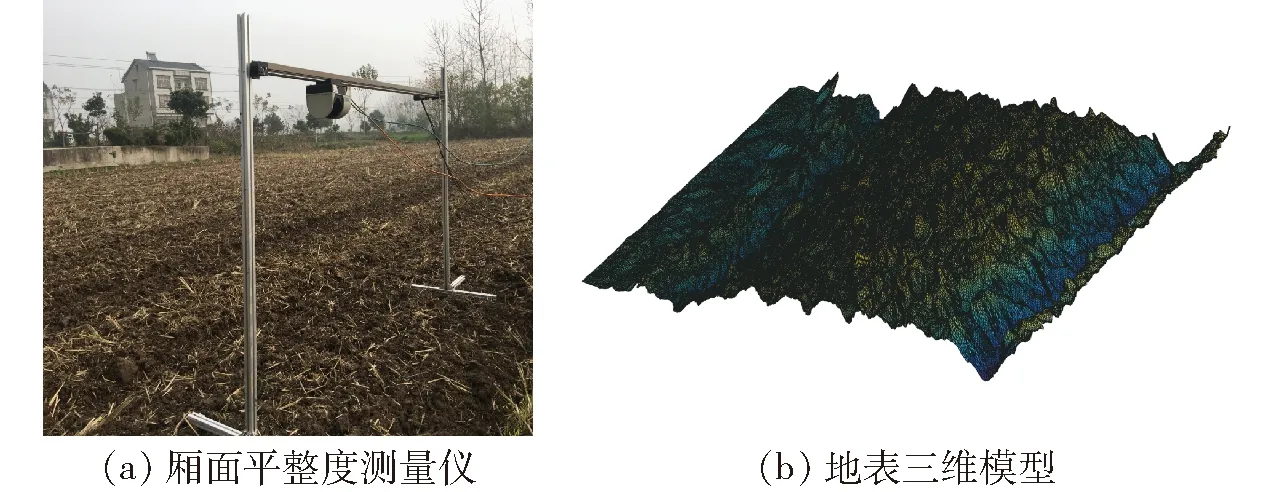
图13 田间试验效果及厢面分析
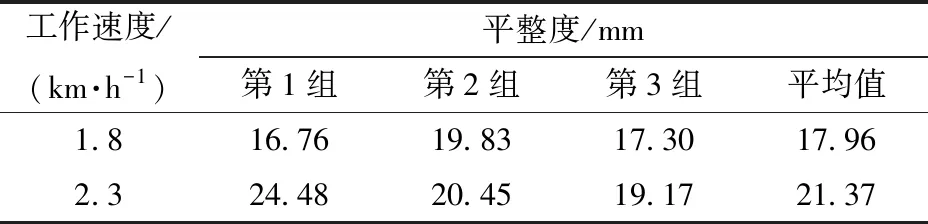
表6 厢面平整度试验结果
激光雷达移动过程中扫描的数据点为在极坐标系内扫描仪中心与地表的垂直距离,取水平地表为基准参考平面,进行坐标系转换及基准变换,得到转换后直角坐标系内各数据点坐标
(8)
式中xj——直角坐标系中各扫描点X轴坐标值,mm
yj——直角坐标系中各扫描点Y轴坐标值,mm
lb——激光雷达扫描中心与地表水平面基准线的垂直距离,mm
Mj——极坐标中各扫描点对应的坐标值,mm
φj——极坐标中各扫描点对应的采样角度,范围为45°~135°
对获取的测量数据进行有效区域提取和误差补偿处理后,利用Matlab生成地表三维模型,如图13b所示,测量结果与实际地表高度变化吻合。选取厢面有效区域数据并计算其标准差即为厢面平整度。选取拖拉机速度1.8、2.3 km/h下测量的3组数据平均值,得到机具作业后厢面平整度为17.96~21.37 mm,施肥开沟器对厢面造成的扰动较小,厢面质量达到油菜播种要求[30]。
5 结论
(1)设计了一种适应于稻油轮作区油菜直播的主动防堵深施肥装置,施肥装置与油菜精量联合直播机配套使用,通过施肥铲体结构包络旋耕刀片末端运动轨迹,通过旋耕刀片主动刮削黏附在铲体的土壤秸秆混合物,实现主动防堵功能。
(2)通过分析包络式施肥铲结构曲线和工作要求,确定了施肥铲的结构设计准则:在满足刮削防堵条件下保证肥料颗粒在铲内的运动流畅,建立了包络式施肥开沟器结构设计优化数学模型,确定了包络式施肥铲优化设计关键参数及取值范围为:入土圆弧段圆心角θ2为32°~46°、过渡段上端圆弧直径d2为80~120 mm、过渡段下端圆弧直径d1为50~130 mm。
(3)通过离散元仿真,分析了施肥铲结构关键参数对肥料颗粒运动状态的影响;结合二次旋转正交组合试验方法,分析确定影响施施肥铲内肥料流动性能的因素由大到小依次为过渡段下端圆弧直径d1、过渡段上端圆弧直径d2、入土段上端圆弧段圆心角θ2。建立了肥料颗粒流动速度与施肥开沟器过渡段圆弧直径d1、d2及入土段上端圆弧圆心角θ2的二次多项式回归模型,计算得到施肥开沟器最佳设计参数为:θ2=36°、d2=93 mm、d1=66 mm。
(4)田间试验表明,安装深施肥装置的联合直播机具有良好的田间通过性能,不同作业条件下机具工作性能满足施肥播种机行业标准。机具作业后单个施肥铲体上土壤秸秆混合物黏附量保持在1.5 kg以下,施肥深度平均值91.10 mm,施肥深度合格率为93.33%,施肥断条率为1.08%,厢面平整度为17.96~21.37 mm,有效实现油菜深施肥并整备了良好的种床。