基于UG 的放线架实体建模及运动仿真
2020-03-07王晓霞
王晓霞
(天津工业职业学院,天津300400)
0 引言
拔丝机是金属制品生产预加工设备,它把金属制品的线材进行拉拔处理,使其圆度、直径、表面光洁度、内部金相结构和矫直度都达到要求。 放线架是拔丝生产线中最前端的设备。 放线架按照动力传动方式的不同可以分为主动放线架和被动放线架。主动放线架又被称为动力放线架,随着钢丝线缆行业的产品多样化、 生产自动化等高的技术层次发展,动力放线架作为一种有技术含量的设备,在整个生产线过程中发挥了重要的作用。 本文所设计的鼠笼式放线架属于主动放线架。 动力放线架在在引取速度加快时, 放线速度也跟着引取速度快速加速;在引取速度减速时,放线速度也跟着引取速度减慢;当稳定运行在某个速度时,放线架要运行稳定;当出现松线和断线的时候,要求放线盘可以进行自动反转。 这些都对放线架的结构设计和制造提出了较高的要求。 本文针对的是鼠笼式动力放线架的实体建模,并进行了运动仿真,为后续的优化设计和制造奠定了基础。
1 放线架结构与工作原理
1.1 放线架结构
鼠笼式动力放线架主要由机座、 立轴部件、落子和阻尼装置四大部分组成。 图1 为鼠笼式动力放线架简图。 其中机座是整个放线架的底架,所有部件安装在机座之上。机座材质采用45#钢,按照需要的设计尺寸焊接而成。 立轴部件支撑整个线圈,并传递动力,它包括了立轴、侧板、上板及油缸支板等零部件。 落子直接与线圈接触,根据实际线圈直径大小焊接而成,为防止落子在转动过程中对线材的表面破坏和磨损,鼠笼式动力放线架的落子外形采用圆周焊接, 而落子构架均采用直径相同的钢管,运用折弯技术制作成型。 阻尼装置在放线减速和停止放线时,提供运动的阻力,主要由阻尼连扳、摩擦片、销轴等组成。
1.2 放线架工作原理
放线架根据使用的环境和用途的不用,分为有站立式、躺卧式等多种形式,本文所设计的鼠笼式放线架属于站立式放线架。 其工作原理为:鼠笼式动力放线架工作时,其主轴部件和落子在动力的作用下,首先共同处于水平位置,此时外界机械装置将线圈安装在落子上并固定好,之后主轴部件和落子在动力的作用下共同处于工作状态,放线电动机通过三角皮带把动力传递给立轴, 再经过立轴,把动力传输到放线架落子上, 实现对线缆的放线,放线电机的转速控制着线缆的前进速度。 收线速度控制着线缆在收线处的速度, 收放线之间协调统一、形成放线与收线之间的速度差, 形成放线张力,对线缆产生拉力作用。 在配重块的作用下,实现放线电机转速与线缆之间的精确配合,动态调节张力大小,从而保持张力恒定,提高产品的成品率,保持生产稳定性。

图1 鼠笼式动力放线架简图
2 放线架实体建模
UG 软件是一款交互式CAD/CAM 系统,它具备了辅助设计、辅助分析和辅助制造的功能。 运用辅助设计也就是建模功能,可以进行三维造型,绘制出工程图纸。 运用辅助分析功能,可以检查零部件间的装配是否有问题,建模是否正确。 辅助制造功能主要应用于打样出模,数控加工。
对放线架进行实体建模, 可以在实际加工制造放线架前,了解实体的全部几何信息,清楚放线架内部结构形状,为结构优化做好准备。在对鼠笼式动力放线架实体建模之前, 首先对放线架整体装配图进行分析,研究机座、立轴部件、落子和阻尼装置之间的相互位置关系、结构特征,之后对各个组成部分的零部件图进行分析,研究各零件图的尺寸关系,细节特征,以阻尼装置为例介绍实体建模过程。
首先分析阻尼装置的装配图与零件图。 阻尼装置由阻尼连板、摩擦片、销轴、螺母M14、M12,六角螺丝M16x50、M12x85, 压缩弹簧组成。 其中螺母M14、M12,六角螺丝M16x50、M12x85 属于标准件,利用UG 软件的标准件库,快速创建模型,避免花费大量的时间在简单的重复建模工作上,节约时间成本。 在UG 软件中,调用标准件的具体步骤如下:
(1)在UG 软件中,新建一模型。
(2)在[应用模块]中选择[装配], 打开装配模式。
(3)在左侧图标中,选中[重用库],也就是标准件库,在GB Standard Parts 中,选中需要的标准件。
(4)根据零件图上的尺寸要求,修改标准件的参数,设置定位并检验,即完成了标准件的选用。 建立标准件时注意,坐标系一般设置在标准件的对称中心上,通过主参数来约束次要参数,使得特征数尽量的少。 压缩弹簧则直接点击圆柱压缩弹簧命令,在弹出的对话框中输入相应的参数,如旋向,端部结构,中间直径、自由高度、有效圈数等,完成弹簧的造型。
阻尼装置图中的主要部件, 如阻尼连扳、 摩擦片、销轴等建模的基本思路是将零件图进行分解,运用UG 的建模功能,绘制草图、创建特征,完成实体造型。以摩擦片为例,分三步完成建模。首先打开UG 软件,新建一个空白的模型文件,选中基准坐标系中的“XY 平面”,直接进入草图,绘制零件图外圆基本形状,退出草图,选择拉伸命令,完成28 mm 的拉伸;进入草图做圆直径为20 和35 同心圆,退出草图,选择拉伸命令,完成28 mm 的拉伸;进入草图做直径13的圆,反向拉伸,完成φ13 孔的建模;最后进入草图,绘制内测的两个同心半圆, 退出草图, 选择拉伸命令,完成摩擦片左侧的实体造型。 整个摩擦片是对称结构,通过UG 软件的镜像功能,对摩擦片左侧的实体造型进行镜像,最终完成摩擦片的整体造型。 同样方法完成机座、落子、立轴及其他零件的实体建模。

图2 阻尼装置装配图

图3 摩擦片实体造型
3 放线架虚拟装配
虚拟装配是产品在生产制造前的重要一步,利用虚拟装配,可以验证放线架设计、相对位置和装配操作是否正确,通过可视化显示装配过程,可以方便及时发现设计或装配中的问题,及时对模型进行修改。 创建装配图一般分为自下向上和自上向下两种方法。 根据放线架的结构特征,采用自下向上的装配方法,即先进行单个零部件的创建,然后再对零部件摆放的位置进行合理的设计,这种装配方式直接精准,简单、快速。 对于鼠笼式动力放线架整体装配,采用先部分后整体的装配方式,即先将机座、立轴部件、落子和阻尼装置四大部件分别进行装配,然后对放线架整体按照自下而上的方式进行装配。 以阻尼装置的虚拟装配为例。
打开UG 软件,点击文件菜单栏下的新建按钮,选中第二个装配模块,生成新的装配文件,系统弹出添加组件的对话框,从最近访问的部件中,选中摩擦片为第一个添加的部件,将摩擦片放置在指定的原点位置,在装配约束的对话框中,选择固定,完成摩擦片的装配定位。 添加阻尼板为第二个部件,在装配约束中选中面接触,且阻尼板上的孔φ20 孔与摩擦片上的φ20 孔轴线保持一致,完成阻尼板的装配。 添加2 个销轴,与摩擦片孔对齐,面接触,添加2 个螺母,完成销轴、螺母、阻尼板和摩擦片的装配。 同样的方法完成弹簧,六角螺栓和摩擦片的装配。至此,以摩擦片为基体,在UG 装配模块下,通过添加组件,装配约束将阻尼装置的各个零件装配在一起,如图4 所示。
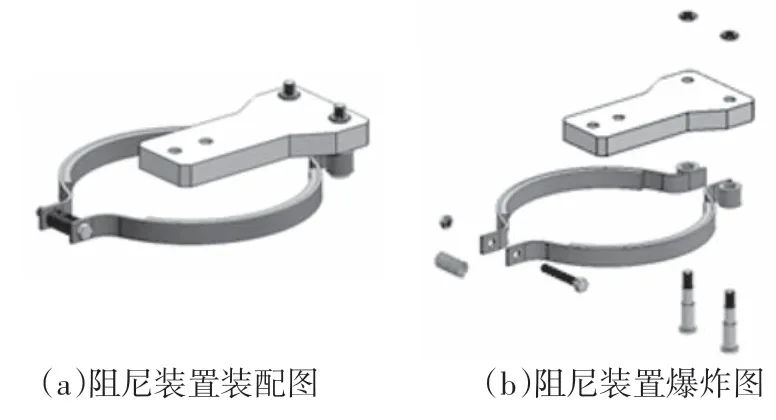
图4 阻尼装置
同样的方法,立轴部件的虚拟装配,以立轴为基体,将立轴、侧板、油缸支架、轴承座等零件依次进行约束装配。 放线架的虚拟装配,以机座为基体,依次进行立轴部件、落子部件和阻尼装置的装配。
4 放线架运动仿真
在放线架真正生产前, 用运动仿真来预测它的运动特性。UG 软件的运动仿真可以实现装配体的仿真运动,对装配体进行运动学或动力学运动分析,验证该运动机构设计的合理性,其分析结果直观易懂。在进行放线架的运动仿真之前, 干涉检查是不可或缺少的一部分。通过干涉检查,对放线架的装配进行干涉检验,以保证仿真运动的顺利进行。 在UG 装配模块下,点击“分析”菜单对装配体进行简单干涉检查,选择需要分析的装配的所有对象,对装配件的全部进行间隙分析, 在干涉部件导航器上没有出现干涉现象,可以进行放线架的运动仿真。
UG 运动仿真一般包括是运动分析类型的设定、运动控制参数的设定、运动仿真过程的的控制、运动仿真过程的跟踪记录、 动画文件的输出和运动结果数据的输出。 运动仿真中的形式运动包括了关节运动仿真和动画运动仿真两种, 在本次放线架运动仿真中,采用的是动画运动仿真的形式。 在UG“开始”菜单下,进入“运动仿真”模块,对放线架进行运动仿真。在弹出的“运动导航器”中选中放线架,并单击鼠标右键“新建仿真”,建立运动场景,设置运动场景参数。 在设置完环境之后,创建连杆“旋转副”,选中除了机座、侧板和油缸支架之外的所有零部件,指定旋转的原点为落子地盘的中心,创建解算方案并求解,求解完成后点击动画即可观看放线架放线状态运动仿真。同样的方法选中除机座以外的所有零部件,创建旋转副,完成放线架上线状态的运动仿真。最后通过“运动仿真”模块中的解算方案和求解,实现对放线架运动仿真的动画控制。经过运动仿真,检查到放线架各部分的运动状况良好,设计满足实际需求,将运动分析结果以图表的形式输出,保存数据。
5 结语
在整条生产线中,放线架处于工艺流程的起始端位置,合理的设计放线架,将使放线架更好地与生产线主控制部分配合,最大程度地发挥放线架的作用。 本文运用UG 软件对鼠笼式动力放线架进行了各零部件的实体建模, 在对其进行虚拟装配之后,对放线架的运动进行了运动仿真,检查了各部件相互之间的运动干涉情况,对整个放线架的优化设计和制造提供了参考,奠定了基础。
