基于无人机航拍影像处理的车速检测研究
2020-02-07赵晋龙浩张雅婷
赵晋 龙浩 张雅婷

摘 要:车速检测作为交通系统中的重要一环,其效果与交通数据的采集方式紧密相关。当前车速检测大多依托增加道路基本设施等方式来实现,所需成本较高且容易受外界因素影响。文中引入机动性强且节能环保的无人机作为提取交通信息的媒介,对航拍所得视频中的影像做移动物体提取并进行车辆分类,随后提取车道范围及车道线宽度,以车道宽度为比例尺,利用前后影像相减法计算车辆移动像素距离,估算车辆速度。在不同飞行高度下对该方法的有效性进行验证,所得车速平均误差为3.22%,可有效解决智能交通系统中广域信息的获取问题。该方法可广泛应用于智能交通管理、灾害预测、地形地貌观测、农林防灾、应急救援等领域。
关键词:车速检测;无人机遥感;智能交通系统;影像处理;计算机技术;SIFT
中图分类号:TP39文献标识码:A文章编号:2095-1302(2020)01-00-03
0 引 言
车速检测是交通管理系统中至关重要的一项任务,常见的车速检测方法主要包括超音波检测、红外线检测、环路线圈式检测以及基于影像检测等[1-2]。然而,超音波检测方法的准确度并不高,容易受到车辆遮蔽和行人的影响,且检测距离短。红外线检测方法则易受车辆本身热源的影响,抗干扰能力较差,因而准确度不高。环路线圈式检测方法准确度相对较高,但需要在车辆通过的路面填埋感应线圈,工程量巨大,不仅会对路面造成严重损坏,而且施工和维修需要封闭道路,易造成交通拥堵[3-4]。基于对上述方法及城市建设和交通管理部门长期实践结果的分析:现有车速检测方法存在明显弊端,容易受到各种因素的影响,无法从根本上解决目前交通系统存在的问题。
随着计算机技术、图像处理等技术的发展,基于影像检测的方法在交通检测中得到了越来越广泛的应用。传统的使用固定式摄像机拍摄交通影像的方法不仅拍摄距离和范围极其有限,同时还容易因拍摄角度固定而造成大车遮挡小车导致车辆辨识困难等问题,存在较大的能源与资源浪费。相对于传统的影像交通檢测方法,利用无人机检测交通具有侦测范围广、廉价便利、获取信息丰富等优点。
虽然无人机已经被广泛用于生活中的诸多方面,但是借助无人机航拍所得图像来进行车速估测的文献相对较少。Yamazaki[5]等人利用车辆阴影来估测车速;Moranduzzo[6]等人尝试使用一组不变特征(即SIFT特征)来定位车辆并借助两幅连续的无人机航拍影像来实现对车速的估测。分析相关研究文献可得,以往通过遥感图像处理来实现车速估测的方式很少受到关注,主要有以下两方面原因:
(1)可实现相同区域图像序列信息获取的设备太少;
(2)所得图像的分辨率较低,导致无法有效识别车辆的空间位置,故车速估测不准确。
随着高分辨率图像的出现,在两个不同时间确定车辆精确的空间位置变得可行,研究人员也逐渐开始通过航拍影像来估测车速。
基于前述分析,本文借助机动性灵活且节能环保的无人机作为交通信息提取的媒介,采用基于影像检测的方法来空拍侦测车辆速度,获得交通资讯并应用于ITS,以期提供政府或驾驶人交通信息,帮助改善城市交通状况、减少疲劳驾驶,进而减少交通事故的发生。经不同飞行高度验证,该方法平均误差为3.22%,可有效解决智能交通大范围信息的获取问题。
考虑到传统车辆速度检测存在建设成本较高,视频采集容易发生车辆重叠、航天遥感探测更新频率低,难以实现连续观测等问题,设计的无人机航拍影像处理的车速检测系统的创新点如下:
(1)引进了无人机航拍作为交通影像获取媒介,由于无人机的拍摄角度是从车道的正上方向下拍摄,不会出现大型车挡住小型车的情形,可以有效避免传统固定架设摄影机的车辆间互相遮蔽问题;
(2)本系统采用无人机航拍方式,其高机动性非常适合做短期活动的周边车流分析,可用于改善大型活动周边车流堵塞等问题;
(3)本系统利用车道宽度作为比例尺计算车速,避免了以往无人机航拍影像分析过程中出现的无人机悬停不稳、悬停高度(采用气压及GPS数据估算)测量误差过大造成的计算错误;
(4)本系统使用连续影像相减法找出移动物和背景,辨识车辆后,计算车辆质心移动的像素距离,解决了以往采用前后景相减算法对车辆辨识较困难等问题;
(5)在背景处理部分,本系统使用二值化方法凸显道路标线,分析车道位置及标线宽度;
(6)在不同飞行高度下进行车速计算实验验证,并计算出了不同高度下的车速测量误差率,拓展了本系统的空间应用范围。
1 无人机航拍影像车速估算
本文通过引入机动性强,灵活且节能环保的无人机作为提取交通信息的媒介,对航拍所得视频中的影像做移动物体提取并进行车辆分类,随后提取车道范围及车道线宽度,以车道宽度为比例尺,利用前后影像相减法计算车辆移动像素距离,估算车辆速度。影像处理流程如图1所示。
1.1 影像前处理
影像前处理主要包含前景提取、色彩空间转换、影像二值化、边缘检测、形态学、水平投影设定感兴趣区域[7-8]等过程。
对于前景提取,本系统选用连续影像相减法(Temporal Differencing)[9]。考虑到连续影像相减法基本不会受无人机晃动的影响,不会因此造成无法有效判断移动的物体,因此可以更完整地获取移动物体的相关信息。
为减少光线变化造成的影响,本系统使用HSV色彩空间,透过转换方程式将RGB色彩空间转换至HSV色彩空间,并利用其饱和度的特性去除影像的阴影,以进行后续影像处理。
形态学处理(Morphology Operation)[10]是针对二值影像强化的应用。其功能主要在于减少影像中零散的物件个数,依照使用者需求设定结构作修补或删减,可以使二值化后的小区块融合或消失。形态学的第一步通常是设定一个结构元素(Structuring Element,SE),其大小和形状皆可自由设定;第二步以预先设定的结构元素作基础,依照形态学的演算法对二值化的影像作填补或挖空。基础的形态学演算法有膨胀(Dilation)和侵蚀(Erosion)两种,由上述两种方式相互组合衍生出断开(Opening)和闭合(Closing)。
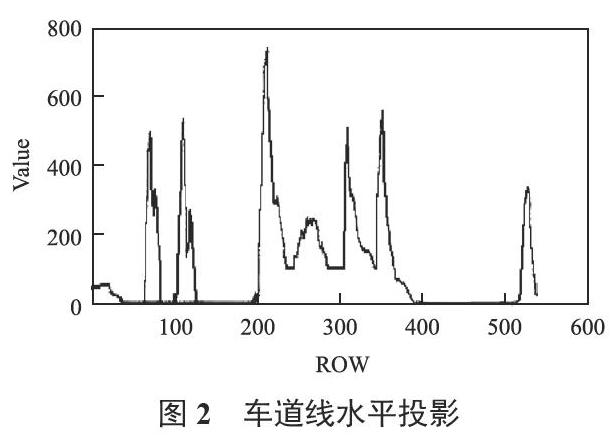
水平投影方法主要是将影像中的物体投影至垂直轴上,沿着行(Column)的方向作像素的加总。水平投影在本系统中用来判断车道占整张图片垂直轴的比例,以此判断各车道的范围及设定感兴趣的区域(Reign of Interest,ROI)。如图2所示,可根据车道线所在位置之间垂直距离的规律变化标出车道中线及车道范围的大概位置以方便后续处理。
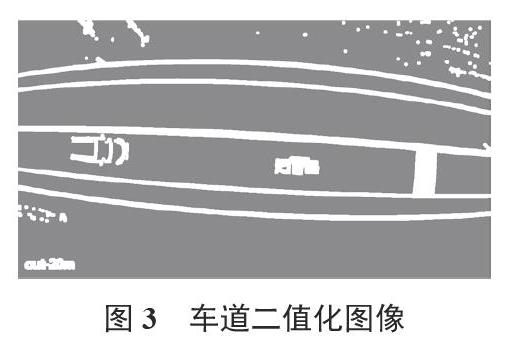
在整张影像中,含有有效信息的区域可能仅为一小部分,但系统却需要处理整张影像,导致系统处理图像数据的时间过长,不仅浪费计算机效能,甚至还有可能因为其他潜在干扰因素而造成整个系统的误判。因此,本系统仅对影像中的特定区域进行提取,以此作为设定的ROI。设定感兴趣的区域后,不仅可以极大地减少系统所需要处理的图像量,而且可以将因摄影镜头造成的较严重变形的画面边缘移除,以达到较高的精准度。
车道二值化图像如图3所示。
1.2 车流分析
本系统采用Matlab设计影像处理程序,通过连续影像中车辆的比对,找出其在下一幅影像中的位置,并且利用其在影像上的特征追踪、过滤目标,从而计算出车速,最后在画面上显示车速计算结果。
1.2.1 特征提取
特征提取是用来区分影像中各不同物体的方法,常见的特征包括色彩、大小及纹理等。本系统主要通过计算前景物体的大小及边长来计算质心的位置,方法如下:
(1)将整张图像用连续影像相减法提取前景影像,之后提取ROI区域内的影像并通过二值化将图像简化;
(2)利用形态学方法去除干扰、修补影像即可得到较完整的前景影像;
(3)通过连通区域标记法将前景影像中相互连通的区域标记成一个整体,计算出每个整体部分的长、宽以及质心的位置,供后续计算车速使用。
1.2.2 移动物体分类
经过特征提取后,依據获取的图像信息进行车流分析与移动物分类,将非车辆的移动物体排除。
本系统主要利用连通区域的边长来判断移动物体的大小,即利用连通区域的长度和宽度来判断移动物体的类型。首先,判断连通区域的宽度是否大于车道宽度的四分之一(车道宽度是依据水平投影所得到的平均车道宽度):如果连通区域宽度大于车道宽度的四分之一,则需要对长宽比进行判断,反之则视为干扰,将其排除;若连通区域宽度大于车道宽度的四分之一,且长宽比介于1.5~3倍之间,则将其视为车辆,此区间包含小型车(机车、自行车等)以及中型车(汽车、商务车、小货车等);车宽大于车道宽度一半且长度超过宽度3.5倍的车辆,我们将其划分为大型车(包含卡车、公交车、旅游大巴、大货车等),其他车宽则视为干扰排除。此方法可以将大部分因无人机检测失当或路边树木枝叶晃动而产生的残影以及其他非车辆的移动物体排除。
1.2.3 车速计算
目前大多通过坐标平面转换的方式测量车辆速度,这就需要先在真实场景中设立参考点后进行测量,接着在影像中判断参考点位置,并输入其在真实场景中的相对位置信息,通过三维坐标换算出车辆在影像中的实际行驶距离,再根据速率公式计算出车辆速度。但由于相关参数获取耗时太久,且此种方式无法与无人机所具备的机动性及方便性所比拟,因此本系统提出一种较方便、快速的测量方法。
本系统采用的方法以现有道路标线为参考,以此来计算汽车实际行驶距离,系统在判断车型时,会依据车型的长宽比判断移动物体是否为需要提取的目标,如果经判断该移动物体不是目标物,则系统会将此连通区域视为干扰,不对其速度进行测量。而经判断被视为目标物的连通区域,本系统会先计算连通区域的质心,将目标物位置有效定义,随后比较前后两张图片的质心,再利用欧式距离公式即可计算出质心的移动距离。以水平投影估计出的车道宽度为比例尺,将每个像素所代表的实际距离与质心移动距离的像素相乘,即可得知车辆的实际移动距离,再将其除以两张图片间的时间差,便可求得车辆的移动速度。
1.3 系统有效性验证
为验证该基于无人机航拍影像处理的车速检测系统的有效性,在将车辆实际行驶车速设定为恒定值45 km/h的基础上,使用了具有GPS定位与手机操控功能的DJI PHANTON2 VISION+无人机进行了几十次实际车辆行驶速度测量的对比实验,飞行高度分别为20 m,30 m和40 m,对数据进行完整记录,求解出不同高度下的平均值及平均误差。DJI PHANTON2 VISION+无人机的GPS定位功能可以有效减少对于操控技术的要求,而专精在空拍画面上。同时,通过手机APP的操作界面,可以实时获取目前无人机的速度、高度以及摄影机与摄影画面等信息。其摄影机录影最高画质为1 920×1 080 Pixels(30 FPS),但为了提升运算速度,将分辨率降低至960×540 Pixels。实验开发平台为Matlab 2016b,影像提取间隔为15 Frames,等同于1 s内提取2张影像进行处理。20 m,30 m,40 m高度下实验估算车速结果示例如图4所示。根据表1中不同高度下的速度估测值与平均误差比率可得,本系统车速估测总平均误差比率为3.22%,车速估测效果良好,故基于无人机航拍影像处理的车速检测系统较为有效。
2 结 语
本文研究的是基于无人机航拍影像处理的车速检测系统,引入机动性强、灵活且节能环保的无人机作为提取交通信息的媒介,通过对航拍所得视频中的影像做移动物体提取并进行车辆分类,随后提取车道范围及车道线宽度,以车道宽度为比例尺,利用前后影像相减法计算车辆移动像素距离,从而估算出车辆速度,不同高度下的平均误差率为3.22%,车速检测效果良好。
与传统的车速检测系统相比,该系统成本低,灵活性、抗干扰性更强,亦可载入FPGA提升计算速度,进行实时分析决策,因此可被广泛应用于智能交通系统中。
参 考 文 献
[1] GONZALEZ C,PEREZ M E S-S. IRF World Road Statistics 2012:Data 2005-2012 [R]. World Road Statistics,2012.
[2]史文中,贺志勇,张肖宁.浅析3S技术集成与公路交通建设[J].测绘通报,2003,12(3):12-15.
[3]李德仁,李清泉,杨必胜,等.3S技术与智能交通[J].武汉大学学报(信息科学版),2008,33(4):331-336.
[4]彭春华,刘建业,刘岳峰,等.车辆检测传感器综述[J].传感器与微系统,2007,26(6):4-7.
[5] YAMAZAKI F,LIU W,VU T T. Vehicle extraction and speed detection from digital aerialImages [C]// IEEE International Geoscience & Remote Sensing Symposium,Boston,Massachusetts,U.S.A,2008.
[6] MORANDUZZO T,MELGANI F. Car Speed Estimation Method for UAV Images [C]// IEEE International Geoscience & Remote Sensing Symposium,Quebec,Canada,2014.
[7] WANG W,HE Y,LI Z,et al. A real-time target detection algorithm for infrared search and track system based on ROI extraction,in signal processing,communication and computing (ICSPCC)[C]// 2012 IEEE International Conference on,2012:774-778.
[8] BARBANCHO I,SEGURA C,TARDON L J,et al. Automatic selection of the region of interest in ancient scores [C]// in MELECON 2010-2010 15th IEEE Mediterranean Electrotechnical Conference,2010:326-331.
[9] MURALI S,GIRISHA R. Segmentation of Motion Objects from Surveillance Video Sequences Using Temporal Differencing Combined with Multiple Correlation,in Advanced Video and Signal Based Surveillance,2009 [C]// AVSS '09. Sixth IEEE International Conference on,2009:472-477.
[10]王亞洲.基于无人机航拍图像的拼接算法研究[D].北京:北京工业大学,2018.
