多视点的三维重建技术的研究及实现
2020-02-03王锦
王锦
(广州大学纺织服装学院 广东省广州市 510165)
三维重建技术可以基于计算机的高处理性能,进行有效实现。在虚拟现实三维动画当中,其整体技术得到了显著发展与应用。如在macOS Big Sur 系统以及Windows10 系统当中,其自身均内置了虚拟现实仿真门户,使用者可以通过此应用程序,达成三维模型的构建,实现全面提升。此外,在三维软件当中,利用3DMax、BIM(Building Information Modeling)等三维建模软件可以实现有效的交互。在三维建模图像处理当中,计算机可以有效提取相应建模的表面信息,建立有效的仿真模型,以便于各领域进行有效连接。如,在进行工程建设当中,为了保证整体工程性的有效开展,可使用BIM 技术进行构建,通过计算机模拟相关的工程,实现整体的有效连接。
1 基于计算机自身的三维模型重建技术
对三维模型重建进行分析,可以得知其以计算机视觉为主要研究方向,对自身的构建可实现“单幅”或“多幅”图像实现采集、拼接,有效构建三维模型。在构建方式当中,其主要基于以下四大构建模式[1]。
基于明暗的三维重建。此类方法可以根据单幅图像完美恢复出整体物体的三维信息,但在成像过程当中,由于其参考依据仅根据单幅图像设定。因此,其整体深度信息呈现了一定的不足,对表面特性无法实现全面体现,精准度较低。在应用范围当中,未能得到有效发展。
双目立体视觉法。此种方法可通过计算机自身的核心,模拟出动物以及人类的眼睛。在动物以及人类眼睛的成像过程当中,其具有一定的“间距性”。而计算机完美的模拟了此中“间距性”。在拍摄过程当中,同时摄取场景图像,根据光学三角原理,获取物体表面三维坐标。随后转换为相应的数据,在系统当中,生成三维图形,有效实现立体匹配[2]。
三目立体视觉以及多目立体视觉方法。作为先进的三维构件法,在三目立体视觉当中,其可以采用计算机进行自动匹配,使匹配结果更具精准性。在三目视觉匹配当中,为了提升整体的匹配可靠性,必须减少相机之间的基线,保持自有精准性。多目立体视觉方法当中的“多目立体匹配”机制,可以对多度的重叠点进行交汇,利用较多的冗杂数据,有效解决其在建筑过程当中的匹配问题。合理有效的提升三维模型的精准度,但其对其硬件设置以及相机的拍摄标准具有明显要求。
基于运动系统的三维结构重建。此种方式可以采用动态追踪,利用相机对相关图像进行拍摄,构建有效的三维结构图形,在数字传感器、微处理器等硬件的加持下,重新绘制三维结构,使整体的三维技术得到飞速发展。现如今,此技术已被广泛应用于工业、建筑、航空等领域。在整体的视觉系统当中,根据相关的图像信息,实时绘制三维场景,使整体项目明显具备可用性。
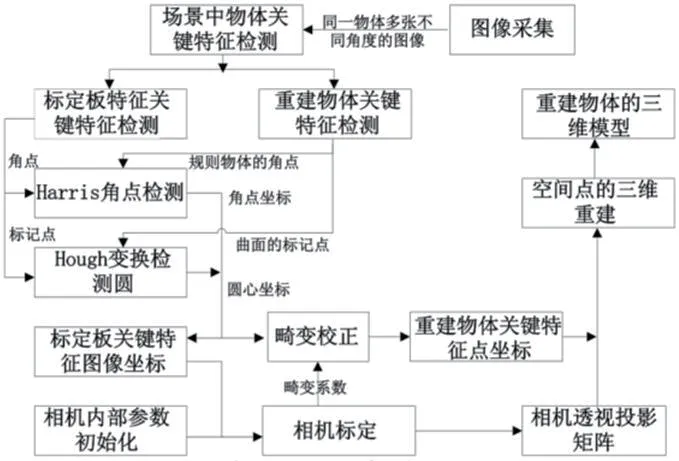
图1:多视点三维重建相关结果
2 多视点重建算法的整体分析建立
在进行三维重建当中,在其特征检测环节,可对物体的特征(如物体自身的边缘、轮廓等)等实现几何构件。通过像素特点进行重组,有效提升三维重建的速度,在现有图像当中,计算机提取定位精准的特征点。在重建过程当中,有效达到其理想目标,在特征点、侧重点检测中,相机数据可有效提取整体坐标系,将已知数据进行全面整合,基于此类特点,可直接影响到相机标记以及物体重建的结果,实现全面精准度[3]。
在图像特征当中,根据图像的自由规则进行设定,可以得知其自身在图像透露形状信息时具有明显的吸收性。此外,“角点”是图像非常重要的一个局部因素。“角点”具有“旋转不变形”以及“不随光照改变”等优点,在三维重建技术应用当中,可以“角点”为特征,进行全面处理。有效减少参与计算的整体数据量,使整体图像信息以“角点”为特征,进行构建,全面实现其自身价值。在构建模式当中,所有物体均具有明显的特征点,“角点”模型构建需要在物体表面分布具有明显特征识别的元素。作为标记点,常见的图形有圆形、十字划线等图案,提升整体的提取可靠性,实现全自动化操作。
3 多视点三维重建的相关实验结果
在多视点三维重建实验过程当中,利用采集到的多幅场景图像,可以对整体的模型进行完美模拟[4]。在拍摄位置与姿态基础当中,实现有效的交互性,为其人机共融提供了有效的基础。同时,三维重建也可基于算法,对其特征点进行有效获取(如图1所示)。
3.1 实现相关的基础图像采集工作
作为三维重建的重要步骤,图像采集是其基本环节。如何得到理想的图像,对三维重建模型的精准度有直接联系,因此,在采集过程当中,其照明、相机质量、传感器等均对被测物体的基本特征精准度具有直接关系。在实验过程当中,针对重建物体自身的特征,可以在自然光照环境下,完美体现。使用日光灯为辅助照明工具,保证被测物体的重要特征,有效展现以重建物体为中心,在扇形区域内对不同角度进行有效采集[5]。
3.2 保障相关的信息特征点提取
在采集过程当中,所有物体表面均包含了此物体的特征点,对于三维重建技术而言,在构建过程当中,必须基于此的特点进行完全设定。在自有轮廓边缘当中,采用Harris 检测法进行全面检测。由于检测过程当中,基于其绘图变化为焦点特征进行测量,因此,为了验证整体算法的精准性以及有效性,在实验场景当中加入适量光照,实现全面特征体现。
3.3 相机标定
在后续相机标定当中,可以得知其根据内部数据参数以及外部数据参数进行全面测量,设立相对应的关系在整体的测量环节当中,对于标定板的选择,可以根据事先的已知尺寸设定,标定版使用具有相应的优点。首先,标定板面自身的结构比三维标定物简单,在图像投射过程当中,整体选择较为丰富,便于制作。此外,在运营过程当中,方块图形在图像模式当中,易于提取,且焦点自身具有旋转普遍性等优点。采用方形图案标定版,可以保证三维重建技术的有效性,整体的圆形标定可以按照相关的行列进行排序,以便其相机标点算法,基于坐标点进行换算[6]。
3.4 空间点的精准三维构建
在整体的构建流程当中,相机排列顺序以相机CCD 设定,例如器“y”为“0”,在三维重建时,以小孔成像为基准模型进行设定。但其相机的整体成像原则与小孔成像概念具有一定的差异性,整体镜头的复杂性与工艺水准受时间因素影响,在后期成像系统当中有可能会受到一定干扰。因此,其空间坐标点可能与实际坐标存在较大差异。
在后续的建设过程当中,普通相机的图像采集自身具有明确的不稳定性因素。在重建过程当中,有可能会出现误差,因此,在采集多张图像后,通过Tsai 两步法,将相机标定相应物体的特征点进行修正。由此可见,在后期的三维重建法当中,整体实验具有明显的可行性。在整体物体的成像当中,实现进一步推广,利用误差分析法,验证本文实验的有效性[7]。
4 三维重建技术的应用展望
三维重建是一项非常庞大且复杂性的问题,在整体的经验积累探索当中,必须基于此类特点,实现全面融合,对专业领域进行全面研究。首先,在“非欧氏空间三维重建”当中,整体基于视觉欧氏图集和发展。因此,具有一定的提升性。而曲面重建融合当中,可以通过相应物体的形状,以“点”、“线”、“面”等基本元素进行构建。因此,全面重建同样具有明显的推广性,曲面基元构成的三维重建模型,可以有效规划出完全整体[8]。
在我国未来的发展过程当中,三维重建技术将应我国各领域,实现有机融合,在医疗、建筑、教育等领域实现全面应用。例如,在医疗领域,三维重建技术可以通过扫描的形式,对患者的身体构造进行三维模拟,便于医生对手术方案进行全面设定。分析在手术过程当中有可能会出现的相关风险,提升整体的手术成功率。而在教学过程当中,教师基于三维重建技术,也可对学生进行知识体系的规划,保证学生通过合理有效的形式,对整体知识点进行全面吸收。三维重建技术与计算机领域为共生状态,在一定程度上也提升了我国人才对于信息技术的掌握,对后续发展提供了全面的保障。对我国自有建设以及全方面的人才培养起到了一举多得的培养效果以及吻合作用[9-10]。
5 结束语
综上所述,在多视点的三维重建技术研究当中,其整体虽然存在一定的问题,如“成本偏高”、“灵活性”以及“适应性”有待提升等问题外。其自身对于物体特征重建实现了完美的应用,三维重建是以一种可以实现广泛应用的技术,其对于我国各领域均可实现有效融合。在“虚拟现实”、“三维动画”等领域当中,实现了全面提升。
