基于室内大空间消防系统的三目定位法的研究
2020-02-02蔡道鑫王厚非黄晓阳曹峰源杨保华
蔡道鑫 王厚非 黄晓阳 曹峰源 杨保华
摘要:受国内经济飞速发展及中国制造2025战略需要,室内大空间消防设备备受各行各业青睐。双目定位系统无法有效响应较大室内空间的应用需求,因此需要对三目立体定位的室内大空间标定与优化方法进行相关的研究。首先通过通过坐标矩阵转换,对物项在空间点坐标、图像点坐标进行运算,得到物项在空间中的具体布置,通过得出三目定位系统结构参数与分析数学模型,建立三目立体定位系统,并将将结构参数与测量精度数学模型内分析,同时给出了用于大空间室内消防的三目定位烟雾报警器模型。
Abstract: By the rapid development of the domestic economy and the strategic needs of China Manufacturing 2025, indoor large space fire fighting equipment is favored by all walks of life. However, for a long time, domestic and foreign scholars have focused on the research of binocular positioning system, which can not effectively respond to the application needs of large indoor space. Aiming at the status of indoor large space fire protection, this paper studies the calibration and optimization methods of indoor large space for three-eye positioning.
关键词:室内大空间;消防;三目定位
Key words: large indoor space;fire control;three-eye location
中图分类号:TP277 文献标识码:A 文章编号:1006-4311(2020)03-0245-03
1 研究现状
利用双摄像机模拟生物视觉的系统称之为双目视觉测量系统,此系统更适合测量大尺寸目标物的轮廓[1],该理论由美国麻省理工学院的 Marr 教授首次提出。摄像机组成数大于或等于三台的系统称之为多目立体视觉系统,多目立体视觉系统拥有较多优点,如涵盖面广、响应时间极短、信息量丰富、高度自动化等,多用于大空间检测、医疗医学、军事侦察、VR等领域。借助三组摄像机来增加多层次的空间边界约束,有效降低双目视觉模型、单目视觉模型存在的定位匹配差异缺陷[2,3]。
本文提出一种基于位置分组的多摄像机标定方法,利用摄像机相邻位置关系对摄像机进行随机分组,对各组摄像机进行标定来生成初始参数,随后通过全部摄像机对公共可视平面的综合校正,将各组摄像头定位至绝对坐标体系中,实现摄像机组外部参数的统一化。
基本方法:
①以三目定位系统为基础的室内大空间定位方法探究。
基于大空间分离式标定应用原理,构建在大空间应用场景中的标定数学运算模型,采用罗德里格矩阵实现分离式标定的矩阵转变,依托空间测量原理实现摄像机在三目定位体系中的区域定位。最后编制大空间分离式标定的操作步骤,构建验证模型,并对测试数据进行验证和分析确认。
②以三目定位系统为总体的全局参数优化分析。
基于三目定位系统中各组成部件的运行参数,搭建三目立体定位系统结构参数的数学模型,将数学问题现从实际问题中提取出来。将系统误差分析理论同实际问题相结合,得出二者之间的关系,而关系图则以误差传递系数最小化准则为基础求得,且本系统的结构参数、镜头参数等对系统精度的影响依旧以分布关系图为基礎进行分析,确定本系统的最优结构参数取值范围。
2 系统运行原理及点位标定系数
2.1 系统运行原理
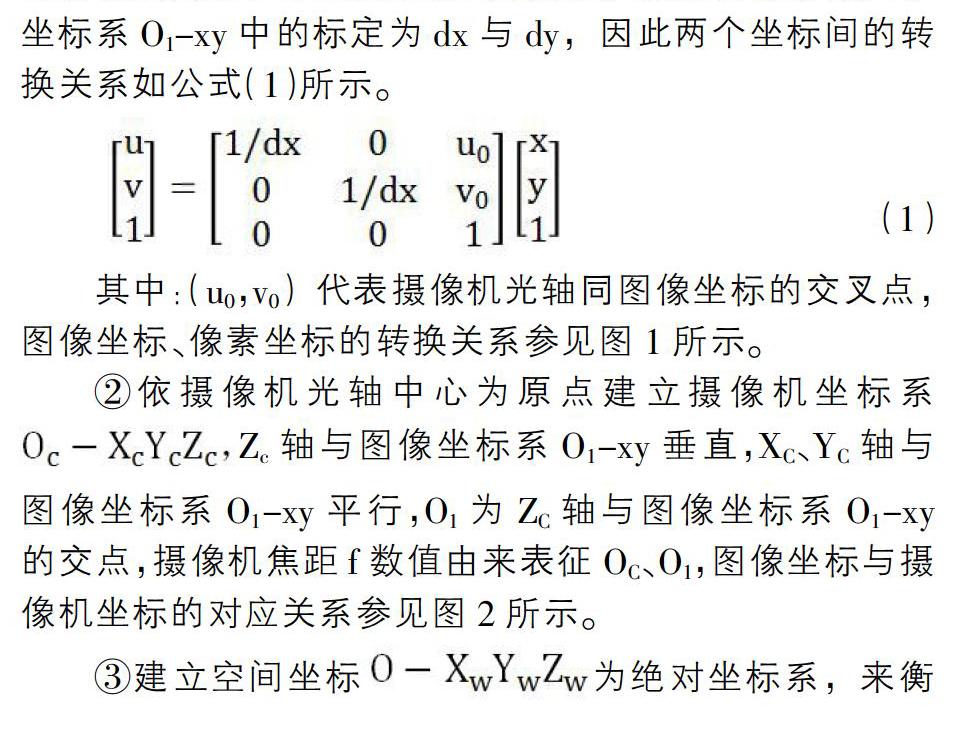
①摄像机组在运行期间,将读取的图像信息以矩阵形式存储于计算机中。采用像素大小来表征图像的亮度,并以像素作基本单位形成矩阵的有效元素。采用灰度来表征黑白图样的亮度,采用三原色来表征彩色图样的亮度。依原点O0生成像素坐标系O0-uv,其中采用u轴表征像素点在矩阵中的列数,v轴表征像素点在矩阵中的行数。如具体应用场景需获取更精确的像素点定位,则需生成以单位长度来表征的坐标,简称为图像坐标系[4]。将图中一点作为原点O1构建图像坐标系O1-xy,该坐标系中x轴对应于原像素坐标系u轴,坐标系中y轴对应于原像素坐标系v轴。假使图像是在理想摄像机运行工况下,O1位于摄像机光轴同图像面的交叉点,并考虑摄像机运行过程中的偏差,因此补偿其与主光轴的距离偏差。设定某像素对应于坐标系O1-xy中的标定为dx与dy,因此两个坐标间的转换关系如公式(1)所示。
2.2 三目定位系统参数
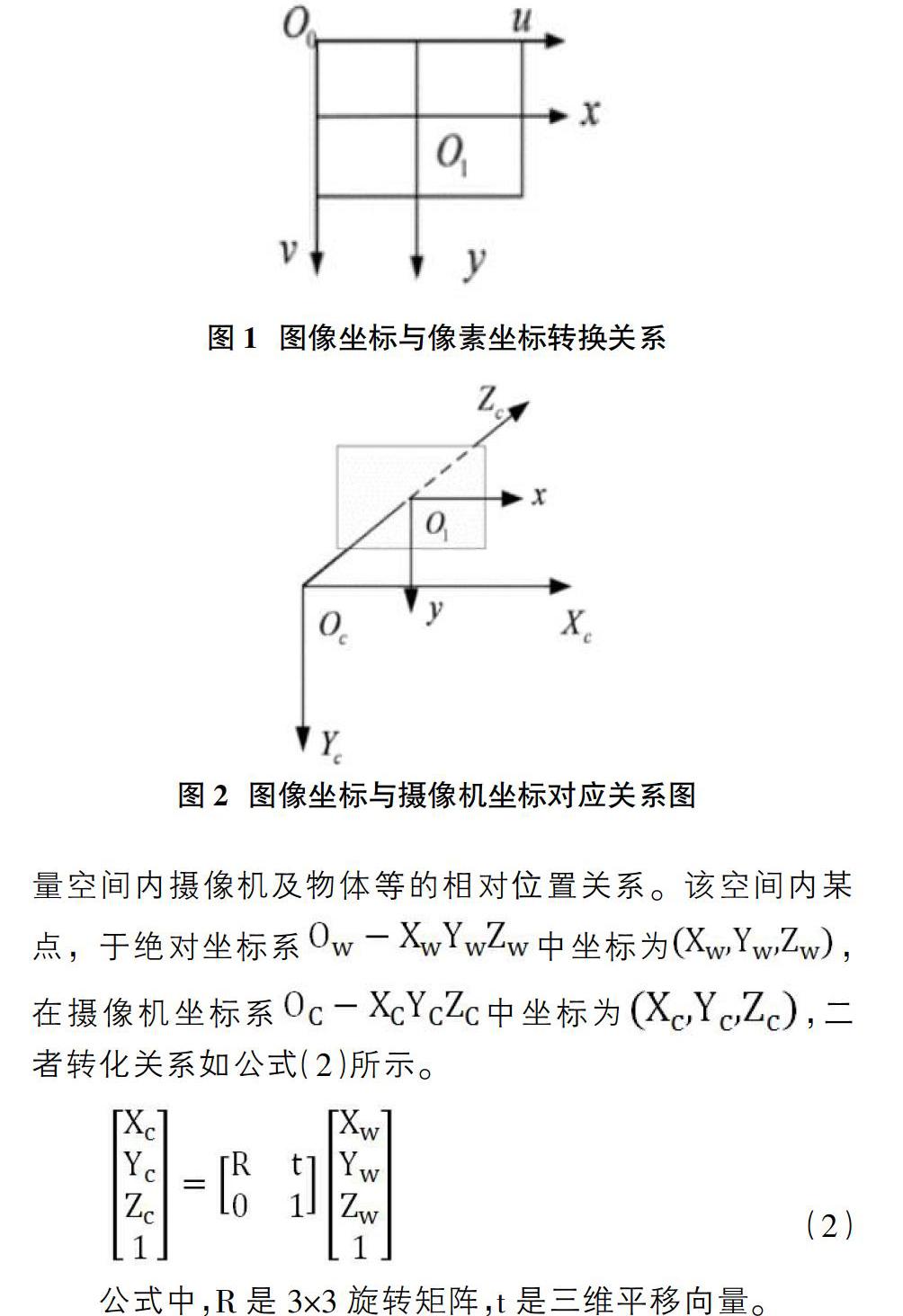
三目定位系统测量目标在于,通过摄像机采样图片中物像相对空间位置,采用变换矩阵原理来定位物体在空间的具体位置。该变换矩阵集成于摄像机的成像模型内,并表征了摄像机在空间区域内的相对位置和摄像机性能参数。
摄像机成像实现原理包括线性、非线性两类。其中小孔成像技术作为理想状态下的线性模型在现实中几乎无法实现,由于实际的摄像机制造过程中摄像机内部构造与镜头会形成不可控畸变,因此在实际应用层面,一般运用非线性成像模型。
2.2.1 大视场标定算法
本文采用非线性成像模型作为摄像机的运算模型,依据实际测量场景需考虑摄像机的径向、切向畸变问题。在摄像机非线性成像模型中,内参矩阵一般考虑像素坐标u值、非正交v值,非正交性值在一般情况下很小。但处于实际测量场景时,物距达到焦距的数千倍,导致测量数据中的非正交值成数千倍的增加,而使成像标定数据同真实数据的差距较大。所以在运算摄像机内部参数时忽略u、v轴非正交参数,即设定内参矩阵内的非正交参数为0。
摄像机中内参矩阵描述为:
2.2.2 定位方法探究
综上所述,定位过程如下所示:
①选取数个棋盘形状的小平面标定板,分别布置于被测量物项中心区域、四周不同区域。将中心区域的标定板设定为主标定板,将该点坐标系设定为“绝对坐标系”。同时将四周区域的标定板设定为区域标定板,该坐标系设定为“区域坐标系”。
②运行三目定位系统对全部标定板进行采样。
③运用外离式大视场标定运算模型对主标定板进行采样标定,运算得到内参参数。
④运用分离式大视场标定运算模型对区域标定板进行采样标定,运算得到外参参数,同时得到各区域标定坐标点。
⑤运用罗德里格矩阵来运算“绝对坐标系”同“区域坐标系”间的转换矩阵。
⑥重复第5步,利用转换矩阵将区域标定的坐标点转变至绝对坐标系内,运算得到外参。
3 结构参数模型优化
3.1 结构参数分析
摄像机视觉系统内置的结构参数,对物项、各组摄像机相对位置的测量精度存在较大的影响约束。三目定位系统技术主要通过坐标矩阵转换,对物项在空间点坐标、图像点坐标进行运算,得到物项在空间中的具体布置。当摄像机相对位置改变时,该系统内的物项、各组摄像机间的位置记忆物体成像点在绝对坐标系中值也同时变化,所以可以得出三目定位系统结构参数影响着测量的精度。而建立三目立体定位系统结构参数则需要分析数学模型,将结构参数与测量精度数学模型内分析。
3.2 结构参数数学模型
采用三角法建立本系统结构参数的数学模型可分析出系统内结构参数对系统实际测量精度的影响,并将其成功应用于室内大空间消防的定位系统之中如图3所示。图4中,C1,C2,C3对应摄像机-1、摄像机-2、摄像机-3在空间中的区域位置,依C1为原点生成坐标系o-xyz,将C1点同C2点方向作为x轴正方向,将B1视作摄像机-1、摄像机-2初始基线,将B2视作摄像机-1、摄像机-3初始基线,C″3为C3在xoz平面的投影,d1,d2分别为m′到B′1与B′2的空间距离。设定M点为被验证物项,M″视作M至xoz面的投影,wl作为摄像机-1同x轴夹角,w2作为摄像机-2同x轴夹角,分别代表物项M于xoz面上投影M″同摄影机1、摄影机2连接线与x轴之间的角度,?琢1,?琢2为M与C1,C″3之间夹角,θ为B′2与z轴的夹角,γ为基线B2与B′2之间的夹角。间夹角,θ为B′2与z轴的夹角,γ为基线B2与B′之间的夹角。
4 结论
本文从实际出发,提出基于本系统的大视场标定方法,在此方法的基础上给出优化方法。该优化方法提出了最佳结构参数模型同时对定位偏差进行分析,讨论了摄像机成像定位过程中偏差检测原理,给出结构参数最优取值范围。综上所述,为解决实际问题,首先提出定位方法,再将此方法优化。给出最优结构参数和取值范围的同时亦给出结构参数的最佳取值范围且分析了定位偏差,并成功应用到室内大空间定位的消防系统之中。
参考文献:
[1]胡汉平.双目立体测距关键技术研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2014.
[2]李明金.基于计算机视觉的空间坐标测量系统研制[D].桂林:桂林电子科技大学,2010.
[3]陈春.料堆测量系统三维重建算法研究[D].沈阳:東北大学,2011.
[4]赵昕扬.用于手术导航的高精度三目视觉定位方法研究[D].南京:南京理工大学,2017.
