自适应区域生长算法在彩色年轮图像分割中的应用
2020-01-18朱琪吴娟
文/朱琪 吴娟
1 引言

图1:自适应的区域生长算法过程
区域生长算法[1]是一种图像分割技术。基本方法是依据一定的准则,将图像中具有相似属性的像素点加以合并,逐渐构成统一的区域。其对图像噪声有很好的抑制作用,并且能够获得清晰的区域信息和分割结果,广泛应用与图像处理中。本区域生长算法根据彩色年轮的特点,结合区域信息和空间信息,对图像进行分水岭算法预处理后,自适应的对图像中断裂的区域进行修补,达到了保持原图像信息完整,获得清晰的分割区域的目的。
2 年轮图像
年轮图像是由早材和晚材组成的。早材又称春材或心材,是由树木在生长季节形成的色泽较浅,材质松软的部分;晚材又称秋材,是由树木进入生长季节晚期,气候变冷,细胞分裂速度减缓并逐渐停止,色泽较深,材质致密,坚硬的部分。年轮图像很好的记录了树木所在地的气候和环境的状况,对研究温室气体排放对气候的影响,水文气候变化过程及其特点、太阳黑子的变化规律等方面都有很好的参考价值。年轮由于在生长过程中受外部环境因素的影响以及样本采集过程中的损伤、样本节疤等因素的影响,使预处理后的图像分割结果出现断裂的现象,本文通过自适应的区域生长算法来解决这一问题。
3 自适应的区域生长算法
通过分水岭算法[2]对原始图像进行预处理,在分割结果中,部分区域出现了断裂的现象,本文的区域生长算法是在其基础上进行进一步的处理。
3.1 确定断裂区域
S为分水岭算法处理后的得出的区域, P为区域S的边界像素点,Pxman为区域S中X轴方向的最大值边界点,Pyman为区域S中Y轴方向的最大值边界点;

若S像素点无法同时满足公式(1)和公式(2),则说明区域S为断裂区域。
3.2 修补断裂区域
S1、S2为未出现断裂的两个区域,P1为区域S1的边界像素点,P1xman为区域S1中X轴方向的最大值边界点,像素点为(P1xman,P1y),P1yman为区域S1中Y轴方向的最大值边界点;像素点为(P1x,P1yman)。
则区域S1两边界点中心点的坐标为(Ms1X,Ms1Y)

区域S2两边界点中心点的坐标为(Ms2X,Ms2Y)
则两中心点满足方程:

则髓心坐标为(Ax,Ay)
若X=0时,Y>0 根据公式(5),可求出髓心坐标值
若Y=0时,X>0 根据公式(5),可求出髓心坐标值
LMIN为区域S1到髓心的最短距离
LMAX为区域S1到髓心的最长距离
若不属于任何区域的像素点P到髓心的距离为Lp

若p点满足公式(6),则为生长点,将其赋予红色。
4 实验和结果分析
以下为图像处理描述(图1)。
自适应的区域生长算法在彩色年轮图像分割共分为3步:
(1)用分水岭算法对图像进行预处理,得到区域信息,这些信息包括完整的晚材区域,也包括出现断裂的晚材区域。
(2)应用本文自适应的区域生长算法首先将区域标记为完整区域,和断裂区域,再求出髓心坐标,根据本算法完成断裂区域的修补。
(3)将出现断裂的区域合并成一个完整的区域。

图2:图像处理结果
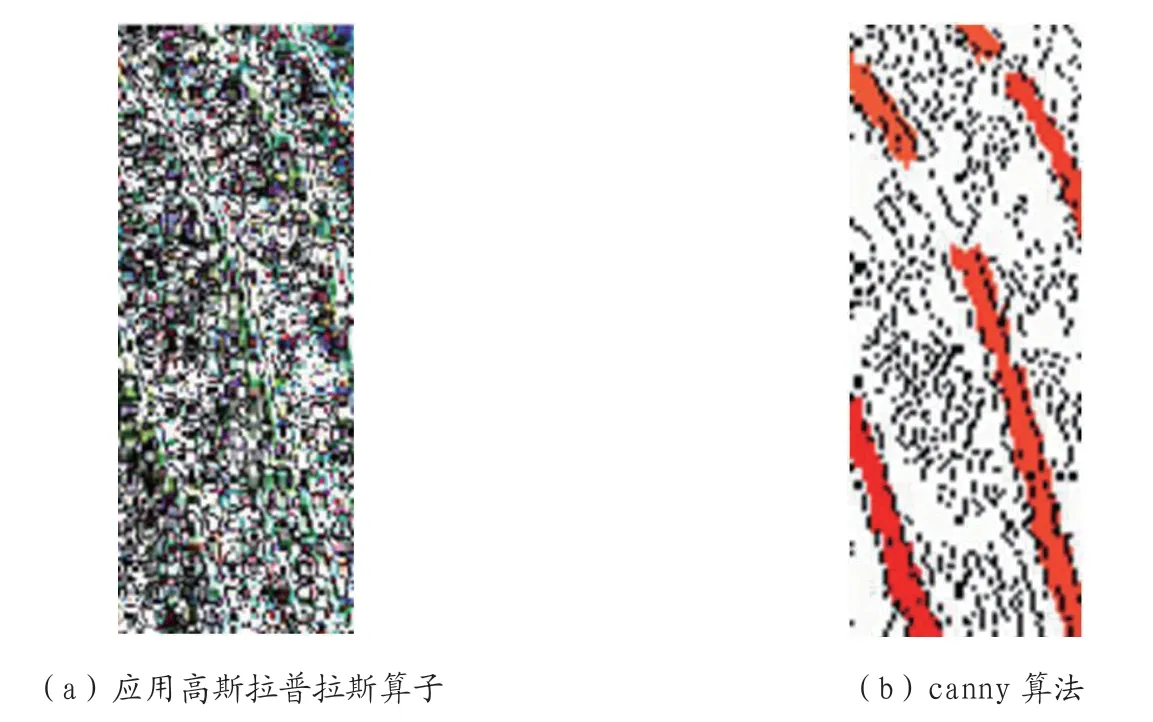
图3:其他算法处理结果
图2(a)为原始图像,图2(b)为分水岭算法的对原始图像进行处理后的结果,图3为应用canny算法[3]、高斯拉普拉斯算法[4]处理的图像。从图2可以看出,本算法可以精确的找到出现断裂的区域,并完成对断裂区域的修补,结果达到了预期目的。
5 小结
采用自适应的区域生长算法对图像出现断裂的部分进行修补,充分利用图像的区域信息、空间信息,结合年轮晚材本身的特点,可有效修补年轮晚材中出现节疤的部分,为后续处理打下良好的基础。
