一种基于视觉的列车智能障碍物检测装置
2020-01-07汪阳戴林恩
汪阳 戴林恩


摘要:随着列车自动化程度的增加,列车智能障碍物检测变得越来越重要。本文运用图像处理技术,基于Journey2设计了一种非接触式列车智能障碍物检测装置。该装置可实现轨道线检测、障碍物识别、障碍物综合判断,可应用于城市轨道交通车辆非接触式障碍物检测。试验结果表明,其对障碍物的检测判断,准确度可达到99%。
关键词:图像处理;非接触式;障碍物检测;Journey2
中图分类号:U284.48 文献标识码:A 文章编号:1004-9436(2020)23-00-03
0 引言
随着技术的发展,无人驾驶的时代悄然降临。在城市轨道交通行业,全自动运行地铁具有正点兑现率高、运力灵活可配置、人员一岗多职能等优点,日益成为城市轨道交通建设的发展方向[1-2]。由于取消了司机岗位,原来由司机承担的轨道区域障碍物检测职责需要智能检测设备来负责。传统列车的智能障碍物检测主要依靠被动式障碍物检测(碰撞检测)。被动式障碍物检测依靠安装于车辆前端的多组碰撞开关,将多组开关状态反馈给车辆信号系统,由车辆执行制动操作。
被动式障碍物检测存在以下问题:无法在非接触情况下实现检测,即只能实现碰撞后检测、需要安装多组碰撞传感器增加了车载设备的复杂度。随着技术发展,非接触式障碍物检测的优势渐渐体现。在非接触式障碍物检测方案中,视觉检测占据了重要地位。现有的视觉检测大多采用传统检测方案,数据处理和数据采集分开进行。这种方式虽然可以增加配置的灵活性,但这也是它的弊端所在,信号延迟高、设备架构复杂[3]。
针对上文提到的现有障碍物检测方式的不足,本文设计了一种基于视觉的列车智能障碍物检测装置,通过智能算法处理,在地铁列车处于无人驾驶模式下运行时,对轨面上方突发侵入或隧道结构设备落下障碍物,实时远距离检测、提前告警,达到保护车辆和铁路设施、保障乘员的生命安全的目标。该装置将数据采集、数据处理合二为一,高度集成化,并且针对城市轨道交通这种使用场景增加了轨道线检测等功能,可满足城市轨道交通设备非接触式障碍物检测需求。
1 功能分析
列车智能障碍物检测装置主要实现的功能有三大块:一是轨道线的检测,在图像传感器将列车前端的视频数据采集后进行处理,使用轨道线检测算法,识别出车辆前进方向上的轨道限界。二是障碍物的识别,通过AI算法智能识别列车前方障碍物类型与位置信息。三是障碍物的综合判断,将轨道线数据和障碍物数据结合,综合判断障碍物所处的位置对列车行进的影响。
城市轨道车辆一般运行在地下和地面线路,环境温度为-25℃~45℃,运行场景固定。
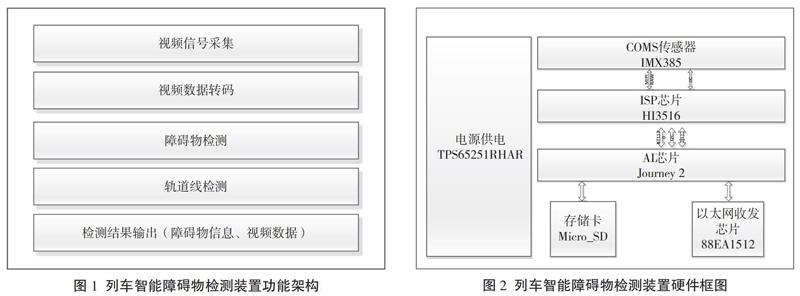
通过上述分析可以得到如下几点系统需求:CMOS(互补金属氧化物半导体)采集芯片需满足低照度,宽动态需求;ISP(图像信号处理)芯片实现转码功能,将原始视频数据RAW格式转成BT1120格式;AI芯片实现轨道线检测、障碍物检测、障碍物的综合判断等功能;电源采用直流供电,宽电压输入;以太网接口,实现视频流、检测结果传输;
功能架构如图1所示。
2 硬件设计
总览设计要求,列车智能障碍物检测装置硬件架构分为3个模块:图像采集模块、数据处理模块、电源供电模块。图像采集模块主要通过CMOS图像传感器实现图像采集,图像采集后需要对图像数据进行转码操作以适配不同的数据处理模块对图像数据格式的需求。转码后的数据传输给数据处理模块。
数据处理模块实现图像数据处理(轨道线检测、障碍物检测)。对于传输过来的视频数据,数据处理模块取其中的一帧画面,利用图像识别算法实现障碍物检测,记录检测出的数据结果,对该帧图片进行轨道线识别检测,检测出的轨道线与障碍物数据结合后判断障碍物是否影响列车运行,判断结果通过以太网进行输出。
电源供电模块通过电平转换芯片将输入的标准电压转换成各个模块需要的电压,保障其他功能模块的正常运行。电源供电模块使用隔离电源模块和非隔离电平转换芯片实现功能。隔离电源模块可实现宽电压输入、宽工作温度范围、欠压保护、输出短路过流过压过温保护。保证了电源供电的可靠。非隔离电平转换芯片则实现各种不同标准电压的输出。
列车智能障碍物检测装置采用千兆以太网接口作为数据传输接口,可实现检测结果传输、视频流传输。
列车智能障碍物检测装置硬件整体架构如图2所示。
2.1 图像采集模块
图像采集模块,选用IMX385作为图像采集芯片。IMX385为低照度、宽动态CMOS传感器,最低可至0.001LUX(光照度)。可满足城市轨道车辆的各种复杂运行环境。支持输出1080P@30fps(画面分辨率为1920×1080,画面流畅度为每秒30帧)实时图像,快速连续检测。视频数据处理芯片选用海思HI3516,用于将IMX385输出的原始视频数据(RAW)转码成AI芯片可接收处理的视频数据格式(BT1120)。海思提供了MPP(媒体处理软件平台),该平台对应用软件屏蔽了芯片相关的复杂的底层处理,并对应用软件直接提供MPI(媒体处理软件平台程序接口)接口完成相应功能,可以简化开发流程。
2.2 数据处理模块
数据处理模块,选用Journey2作为处理芯片。该芯片采用Cortex-A53 CPU处理器,并设计有专门的AI处理器,针对AI处理进行强化。且功耗低于2W,可使用被动式散热方案,增加装置可靠性。该芯片配有一个千兆以太网接口,用于数据交互,可实现视频流的传输。该模块主要实现视频数据处理,通过图像算法将视频数据中的特定目标区分出来,进行逻辑判断并输出结果。
2.3 电源供电模块
隔离电源模塊采用URF1D12QB,该隔离电源模块是为铁路电源领域设计的一款高性能的产品,输出功率达到50W,无最小负载要求,拥有43~160VDC(V表示电压,DC表示直流)宽电压输入,允许工作温度高达105℃,具有输入欠压保护、输出过压保护、短路保护、过温保护、远程遥控及补偿、输出电压调节等功能。通过EN50155铁路标准,满足使用场景的要求。非隔离电平转换芯片采用TPS65251,该芯片也具有宽电压输入(4.5~18V)。该芯片可根据需求设置3个不同的输出电压,可简化芯片供电电路,增强其可靠性,该芯片为工业级芯片,符合城市轨道列车运行环境要求。
3 软件设计
根据功能定义,软件模块主要分成以下几个部分:障碍物检测、轨道线检测、日志记录、视频推流。障碍物检测模块实现障碍物类型识别及距离位置判断;轨道线检测模块实现轨道线识别并将AI目标与轨道线表达式融合,判定是否在轨道线内;日志记录采用开源、轻量级日志记录工具,能够提供向流、标准输出、文件、系统日志、调试器等目标输出日志的能力。视频推流采用RTSP(实时流传输协议),RTSP与RTMP(实时消息传输协议)相比具有传输效率高、等特点。
3.1 障碍物检测
障碍物检测模块获取视频源数据,利用人工智能算法进行目标检测,提取出可上报的障碍物信息输出轨道线检测模块。同时记录视频源数据保存文件,供维护模块通过SFTP(安全文件传送协议)方式下载查看。
障碍物检测模块主要由以下几个组件组成:
主调组件:进行程序初始化,记录视频原始文件,调用其他各组件。主要流程包括:初始化AI网络,加载AI配置文件,加载AI权重文件,创建视频读写器,调用视频获取及图像保存组件,保存原始视频,调用图像识别组件,调用UDP(用户数据报协议)收发组件。
图像分割组件:获取视频图像,对图像进行分割转换后供图像识别组件进行识别,并对图像进行保存,供轨道线检测模块使用。主要流程包括:获取一帧图像;图像分割并转换,保存转换后的图像。
图像识别:利用人工智能算法,识别图像中物体的类别,并将识别的障碍物信息上送到轨道线检测模块中进行与轨道线的融合。主要流程包括:图像预测,预测框输出,预测过滤并按照物体类别进行排序(去除无物体检测或低于阈值的检测物体),计算每个检出物体的位置和距离,释放图像信息,释放目标信息。
TCP收发组件:识别到的障碍物信息上送到轨道线检测模塊中与轨道线融合。主要流程包括:TCP端口的初始化,监听建立连接,数据发送。
3.2 轨道线检测
轨道线检测模块从障碍物检测模块中获取障碍物信息,同时读取保存在本地的图片,进行轨道线检测,并将检测的轨道线结果和障碍物信息融合,判断障碍物是否在轨道线内,并上送障碍物消息。根据图片数据的内容,判断视频源的接收状态后,整合上送给数据处理模块。同时记录日志文件,供维护使用(可通过FTP即文件传输协议下载查看)。
轨道线检测模块主要由以下几个组件组成:
UDP收发消息组件:接收UDP Socket(网络上的两个程序通过一个双向的通信连接实现数据的交换,这个连接的一端称为一个Socket),将其数据解封装,再转为内部结构体数据。发送UDP Socket,将发送的数据基本信息组包组成MsgPack包,Socket发送。主要工作流程包括:轨道线检测模块TCP客户端连接到障碍物检测模块(服务端);接收TCPsocket消息;根据头部信息和数据长度剔除错误数据;根据头部消息判断消息类型(障碍物消息、图片更新消息);如果是障碍物消息则获取障碍物信息,如果是图片更新消息则获取图片序号和产生图片的时间戳。
基于网络的通信在传输数据时为了避免不同平台下字节序及内存对齐的影响,通常会将数据序列化成字节流来传输。在本设计中,选用MsgPack格式来序列化格式数据。MsgPack是一种类似于JSON的数据格式,但是其在序列化/反序列化的速度上进行了较大的优化,可以进行高效处理,并且在库支持方面,所有的主流语言都可以找到开源、免费的支持方案。
轨道线图片获取与目标获取组件:接收视频检测模块发送的新图片消息及新图片中AI目标消息,解析AI目标消息,并记录日志。日志记录采用spdlog,这是一种开源的日志库,只包含头文件,不依赖第三方库文件可以轻松实现部署。
轨道线检测组件:检测图像中的轨道线,得到轨道线表达式。轨道线检测组件首先加载未经检测的视频图片,后根据图片大小判断是否加载成功,该图片是否已经过障碍物检测,经过障碍物检测的图片进入下一步的轨道线检测步骤。主要工作流程包括:对图片进行预处理(转换成灰度图后进行直方图均衡,全图LSD检测,即一种直线检测分割算法);根据LSD线段集及轨道特性查找当前轨道起点;根据新的轨道起点建立搜索框,由起点到轨道尽头划框搜索,搜索划窗内疑似轨道线段;将线段保存到线段集;将轨道线段集拟合,斜率相差小的部分拟合成直线,斜率相差大的拟合成贝塞尔曲线;将轨道线表达式与障碍物融合,将融合数据发送给障碍物综合判断模块。
4 系统测试
4.1 障碍物检测测试
根据城市轨道车辆的运行环境,选取了几种典型障碍物类型——球、人、行李箱、列车,作为测试目标。在实际的使用场景中进行测试,实际测试效果如图3所示:
障碍物检测准确率如表1所示:
4.2 轨道线检测测试
在轨道线检测实际测试中,检测出的轨道线稳定连续,且与轨道线边缘吻合。轨道线检测实际测试效果如图4所示:
4.3 障碍物综合判断测试
障碍物综合判断,可实现碰撞风险分析。障碍物处于轨道界限之内,认为障碍物将会影响列车的运行安全,此时将障碍物信息上报并告警。障碍物处于轨道界限之外,认为障碍物不会影响列车的正常运行,将信息记录至日志。
障碍物综合判断实际测试效果如表2所示。
在实际测试1中,处于轨道界限外的箱子已经被检测到,经过综合判断,认为不会对列车运行造成影响,因此不将障碍物信息上报。实际测试2中,检测到障碍物是人,并处于轨道界限内,综合判断后认为会对列车的运行造成影响,将障碍物信息上报。
5 结语
列车智能障碍物检测是列车智能化发展的重要组成部分,本文针对列车障碍物检测技术的现状,设计了一种基于视觉的列车智能障碍物检测装置。该装置对列车运行前方轨道的障碍物(如车辆、人、行李箱等)主动进行识别同时感知障碍物距离,并具备向车辆预警的能力。当检测出列车前方有障碍物时,根据视频检测结果,提取出障碍物,当障碍物被识别出来的时候,会显示具体目标的类型,当不能识别出具体类别时,作为未知障碍物,但障碍物是存在的。同时不需要人为采取措施,只要前方检测到障碍物会实现自动报警功能,该装置在全线直道、弯道、道岔区域能准确可靠地识别运行前方障碍物,不受相邻轨道障碍物或轨旁障碍物(轨旁围墙、信号机等)的影响。经过实际测试,该方案可稳定运行,并满足功能要求。
参考文献:
[1] 周勇.智能车辆中的几个关键技术研究[D].上海:上海交通大学,2007.
[2] 苗彩霞.现代有轨电车系统特点及应用前景[J].都市快轨交通,2013,26(03):9-12.
[3] 同磊,朱力强,余祖俊,等.基于车载前视摄像机的轨道异物检测[J].交通运输系统工程与信息,2012,12(04):79-83+134.
作者简介:汪阳(1992—),男,山东嘉祥人,学士,助理工程师,系本文通讯作者,研究方向:城轨地铁车辆电气系统设计。
戴林恩(1993—),男,江苏启东人,硕士,助理工程师,研究方向:图像处理及嵌入式开发。
