基于LSTM深度神经网络的自动移船预测控制
2020-01-03周重云李宗华曾祥富钟世位马文杰
周重云 李宗华 曾祥富 钟世位 马文杰
摘 要:针对铺排船施工要求能够满足顺水、逆水、垂直水流,甚至与水流方向成任意角度的铺设工艺,控制策略满足顺水铺排工艺有时难以保证垂直水流铺排工艺,导致时常出现航迹误差较大,影响铺排精度的问题,本文提出基于LSTM深度神经网络的预测控制方法来实现铺排船的自动移船控制。论文设计了LSTM模型结构和输入输出数据组成,采集了铺排船作业的历史数据,经预处理后对LSTM模型进行训练,采用训练后的LSTM模型构建自动移船预测控制系统,应用于长雁2号和22号铺排船。实际铺排施工作业航迹航向数据显示,本文提出的LSTM预测控制算法是有效的。
关键词:铺排船;自动移船;LSTM深度神经网络;预测控制
1引言
为了解决RNN模型训练梯度消失和梯度爆炸的问题,在RNN的基础上,发展了一种长短时记忆神经网络(Long Short Term Memory Network,简称LSTM),它是一种时间递归神经网络,该神经网络具有特殊的结构设计,可以有效保留历史信息,灵活适应网络学习任务的特征。LSTM网络已经成为当前应用最为广泛的一种循环神经网络(Recurrent neural network,RNN)模型,在众多预测任务如语音识别、文字预测、舰船姿态预测等前沿领域中成功应用[1-4]。
长江航道铺排船是一种长江航道整治对现有堤坝进行护堤、护坡、护底作业的普遍使用的工程船舶,由于其無自航能力,施工作业的时候移船和铺排主要靠控制锚绞车收放锚绳来实现。因此,铺排自动作业的控制包含了锚绞车恒张力控制、船舶姿态控制和卷筒与移船船速的协调控制等,在控制策略上重庆航道工程局与武汉理工大学自动化学院长期校企合作,从常规的PID控制、超前-滞后控制到智能控制中的模糊PID控制、专家控制、遗传算法和粒子群优化算法等不断研发并应用于铺排船控制系统,满足了铺排船从6锚到8锚,从22米卷筒到40米卷筒等的船舶结构变化[5-8],达到了铺排船自动铺排作业的精度要求。随着内河航道治理工程要求越来越高,作业水域越来越多样,作业方式也从只在江河流域中间或者沿边缘顺水流地段铺设软体排,发展到要求能够满足顺水、逆水、垂直水流,甚至与水流方向成任意角度的铺设工艺。多次作业发现满足顺水铺排时的控制策略有时就难以满足垂直水流铺排工艺要求,导致铺排船的航迹和航向偏差增大,铺排精度难以满足施工作业要求。本文尝试将LSTM神经网络的预测能力应用于自动铺排控制,经实船作业航向和航迹的数据显示,获得较好的铺排效果。
2基于LSTM的自动移船预测控制设计
2.1 控制系统设计
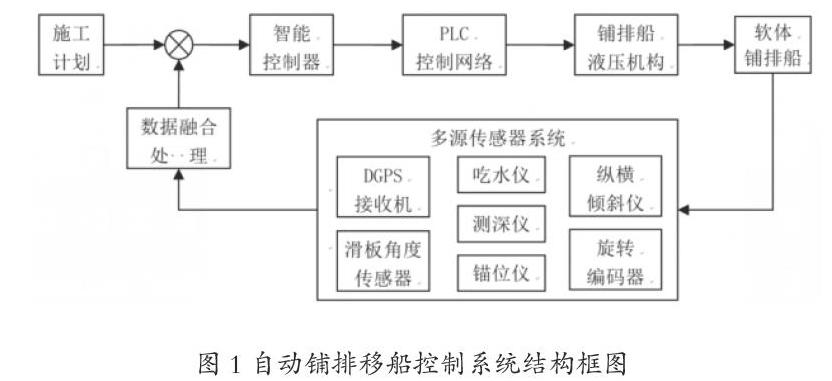
铺排船作业综合自动化系统应用了多种先进技术,包括高精度的动态实时DGPS定位技术、分布式PLC控制系统、现场总线技术、多传感器信息融合技术、智能控制技术、可视化用户软件的开发技术等。通过自动化系统的测量系统、PLC控制网络和上位自动监控软件在基本无人干预的情况下,可以实现自动完成软体排铺设作业,同时可绘出铺排完工图纸、操作日志报表、报警历史报表等工程资料。自动移船铺排的控制系统的结构框图如图1所示,其中发挥核心作用的是智能控制器。操作人员根据施工工程的要求编制施工计划(预定工作线),自动化系统通过多源传感器系统检测铺排船各类信息,经监控主机融合处理后形成铺排船当前的船位、船姿、速度、航向、施工区域水下地形等实时多源信息,智能控制器则根据当前信息与施工计划的偏差作为合理的控制输出量,经PLC(可编程序控制器)控制网络送液压机构执行动作,协调控制船艏、舯、艉多台移船绞车、铺排卷筒机构动作,自动完成一个铺排周期。图1中控制器的输入量——航迹偏差是根据计划的航迹线与GPS定位系统的测量值估算而得。
原有的智能控制算法,包含基于模糊逻辑的PID控制器、专家控制等,在任意铺设角度和水流的影响下,软体排的实际着(河)床位置与估算值之间可能存在较大的偏差,由此得到的多绞车协调控制指令的移船效果就无法保证铺设搭接精度的要求。基于LSTM的预测模型可以实现下一个时刻或者多个时刻的航向航迹偏差,提前控制收放锚缆速度,实现顺水、逆水、垂直水流等施工方式的船舶姿态的迅速调整,从而达到期望的航向和航迹偏差范围。
2.2 基于LSTM的预测控制器设计
自动铺排作业过程中,核心是控制各移船锚绞车的收放缆速度,而各移船锚绞车收放缆速度的集合构成一连串时间序列。因此,本文利用LSTM神经网络在处理时序数据预测方面效果最佳的特点,学习各移船锚绞车收放缆速度的特征,建立深度学习的速度预测模型,从而实现对自动铺排作业的预测控制。在t时刻,取前k个时间序列作Xt-k,Xt-k+1,...,Xt为输入,其中Xt表示移船锚绞车的速度以及铺排船的航迹和航向偏差,以Xt+1作为预测值Yt ,表示t时刻各移船锚绞车的预测速度以及预测航迹、航向偏差,其中t=1,2,...T。通过DGPS定位可以准确地获取铺排船的运动轨迹,包括航向差以及航迹差。将铺排船施工过程中记录下来的历史轨迹数据以及各移船锚绞车的收放速度作为LSTM预测模型的训练数据。LSTM网络构建的预测模型训练算法主要步骤如下:
①铺排船历史作业中各移船绞车的速度以及航迹、航向偏差数据作为样本序列,选取M个历史数据,进行数据预处理后,将70%作为训练样本,30%作为测试样本;
②在t时刻,取前k个时刻的时序数据Xt-k,Xt-k+1,...,Xt作为输入,Xt+1作为预测值Yt,t=1,2,...T。对样本建立输入序列X=(x1,x2,...xT)和输出预测序列Y=(y1,y2,...yT),其中输入为各移船绞车的速度以及航迹、航向偏差,输出仍然为各移船绞车的速度以及航迹、航向偏差;
③设计N层LSTM网络结构,随机给定初始网络参数,包括各层连接权值等,选择合适的优化器,设置优化器函数、batch大小、迭代次数等参数;
④训练模型,使用BPTT算法训练网络,主要包括三个步骤:前向计算每个神经元的输出值、反向计算每个神经元的误差值、根据相应的误差项,计算每个权重的梯度,更新权重和偏置参数,使代价函数最小。代价函数为:
⑤模型测试,模型训练完成后,用预先划分好的30%测试样本进行模型测试,检验LSTM预测模型的预测效果。
3实船实验结果及分析
将本文设计的LSTM预测控制算法应用于长江重庆航道工程局的长雁2号和长雁22号铺排船的控制系统中,比较本文设计的LSTM预测控制算法与模糊PID控制算法的性能。
3.1垂直水流铺排施工
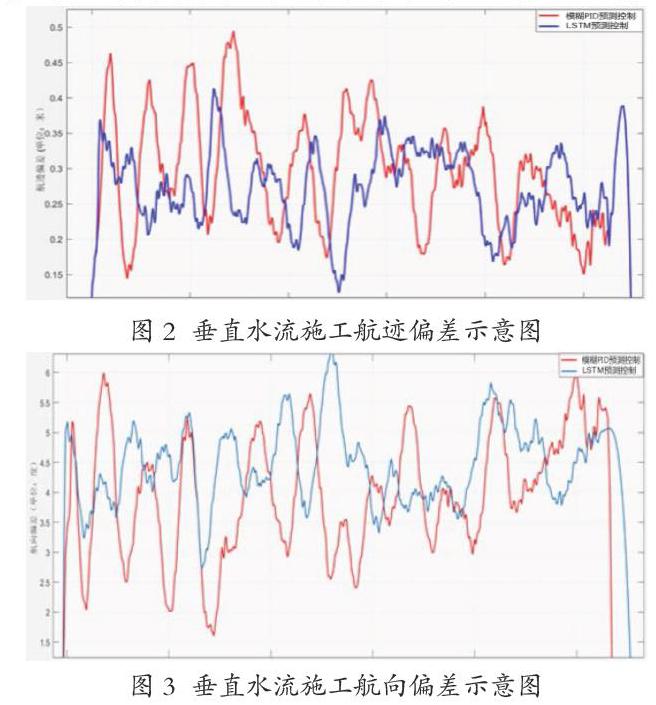
以江西省九江市蔡家渡附近抛掷五锚垂直水流铺排时两天的施工情况分析为例,一天的铺排量为40×100m2,分别选择在前后两天施工时启用模糊PID控制和LSTM预测控制两种控制算法控制铺排船铺排,将两种控制算法下航迹与航向变化绘制于同一图中,曲线如下图2与图3所示:
在同一区域施工时,前后两天风、浪、流的影响大致相近,由图2和图3可见,在垂直水流工况下基于LSTM的预测控制航迹偏差控制精度在0~0.45米,航向偏差控制精度0~6度,而基于模糊PID控制航迹偏差控制精度在0~0.5米,航向偏差0~6度,显然预测控制的控制精度相对更高。在铺排船位姿矫正效率及船舶稳定性上面,可以看出基于LSTM的预测控制调节船舶姿态更迅速,到达稳态时的震荡也要小一些,只是由于江面上风、浪、流的影响,在个别时刻预测控制会出现船体姿态的突变,总体而言铺排时更加稳定且精度更高。这是因为基于LSTM深度神经网络的预测控制算法调整航迹航向偏差时不仅学习了船长的操船经验,而且在制排的间隙可以依据历史的船舶位姿数据更新控制参数,进而可以对下一个时刻或者多个时刻进行预测控制调节偏差。因而利用预测控制进行偏差调节时,船舶姿态修正更快,且呈现平稳前进的趋势。
3.2 顺水流铺排施工
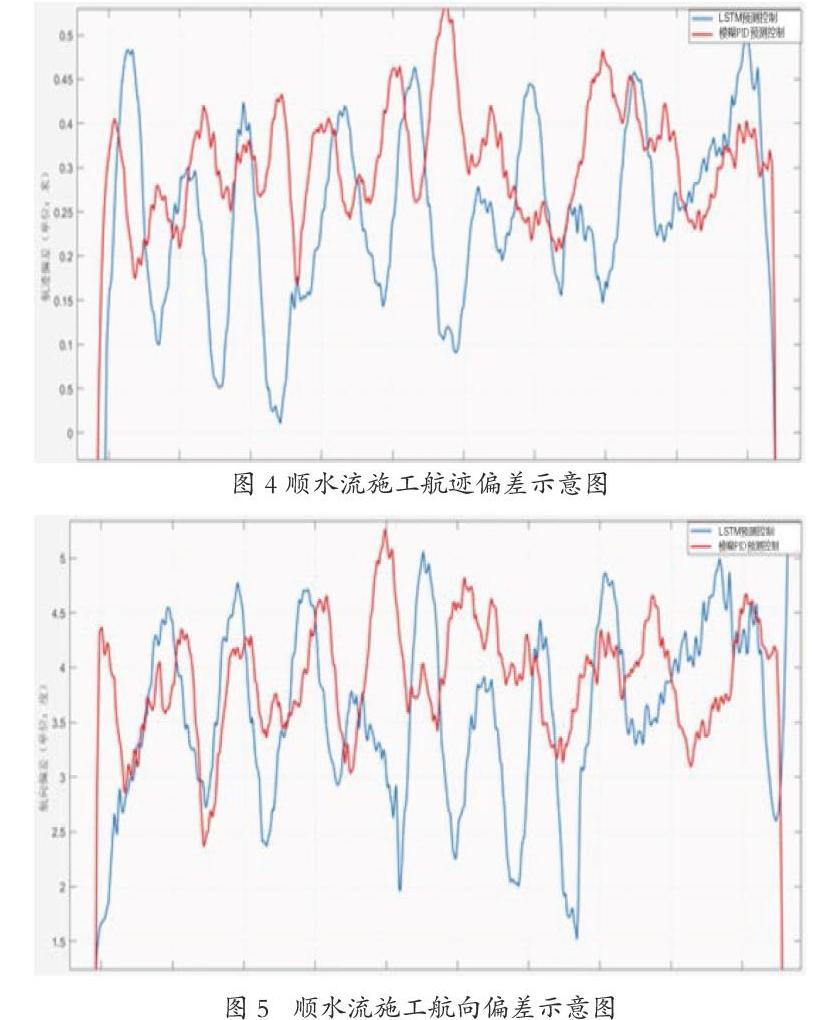
以江西省九江市陆家咀附近六锚顺水铺排时两天的施工情况分析为例,一天的铺排量为40×100m2,分别选择在前后两天施工时启用模糊PID控制和LSTM预测控制两种控制算法控制铺排船铺排,将两种控制算法下航迹与航向变化绘制于同一图中,曲线如图4与图5所示。
在同一区域施工时,前后两天风、浪、流的影响大致相近,由图4和图5可以得知,在顺水流工况下基于LSTM的预测控制航迹偏差控制精度在0~0.48米,航向偏差控制精度0~5度,而基于模糊PID航迹偏差控制精度在0~0.55米,航向偏差0~6度,两种控制方案都能满足铺排精度要求,但控制精度预测控制仍然相对更高。在铺排船位姿矫正效率及船舶稳定性上面,可以看出基于LSTM的预测控制调节船舶姿态更迅速,在船舶施工稳定性上模糊PID控制稍优,这是由于在顺水铺排工况下,抛掷的锚会多,并且水流对船体影响较小。而抛掷的锚越多,移船时船舶受到风、浪、流的影响会更小,更有利于增加模糊PID控制器对船舶修正时的稳定性。而预测控制在调整船舶位姿方面表现更突变。
4结语
本文基于对深度神经网络LSTM模型的研究和分析,提出一种基于LSTM神经网络模型的铺排船自动移船预测控制算法。基于铺排船历史作业数据的收集,对LSTM模型进行训练后应用于长雁2号和长雁22号铺排船的移船自动控制系统中,经过实船使用结果表明:基于LSTM神经网络的预测控制算法,可以使铺排船在顺水和垂直水流施工中的航向差与航迹差均保持在较小的误差范围内,达到了良好的铺排精度指标,显示了深度神经网络在铺排船工程应用上的成功。
参考文献:
[1]余莉萍,梁镇麟,梁瑞宇.基于改进LSTM的儿童语音情感识别模型[J].计算机工程,2020,46(06):40-49.
[2]张新峰,闫昆鹏,赵珣.基于双向LSTM的手写文字识别技术研究[J].南京师大学报(自然科学版),2019,42(03):58-64.
[3]侯永康,邹劲,董超,刘蔚,谈果戈.基于LSTM的三體滑行艇航态预测与航速控制器设计[J].舰船电子工程,2020,40(01):40-45+98.
[4]王国栋, 韩斌, 孙文赟. 基于LSTM的舰船运动姿态短期预测[J]. 舰船科学技术, 2017, 39(13):69-72.
[5]黄珍, 王永骥, 刘清. 非自航工程船舶智能定位系统的开发研究[J]. 武汉理工大学学报(交通科学与工程版), 2006, 30(2):191-193.
[6]黄珍. 锚泊移位型工程船舶系统建模与控制研究[D]. 华中科技大学, 2010.
[7]杨传将. 微粒群算法研究及其在铺排船智能控制中的应用[D]. 武汉理工大学, 2009.
[8]王丽. 智能控制在铺排船自动作业监控系统中的研究与应用[D]. 武汉理工大学, 2008.
[9]Shin S Y, Cha J H. Human Activity Recognition System Using Multimodal Sensor and Deep Learning Based on LSTM[J]. Transactions of the Korean Society of Mechanical Engineers - A, 2018, 42(2):111-121.
