可变形履带式自动巡检消防机器人设计与性能分析
2020-01-01祁宇明邓三鹏林丙好
祁宇明,谢 兵,邓三鹏,林丙好
(天津职业技术师范大学机器人及智能装备研究所,天津30222)
0 引言
根据我国消防救援局调查的数据分析知[1],在2007-2016年之间有228.2万起的火灾被登记在案,造成15124人死亡、9561人受伤,已经核实的财产损失高达284亿元,造成474起大型火灾事件。火灾事故发生一方面是由于企业自身监管不到位、消防设施不全、无人排查安全隐患;另一方面是企业缺少一套完成的消防预警和处理流程。针对此种情况,消防、巡检功能一体化的机器人已经逐步成为消防领域的又一发展方向,自动巡检消防移动机器人辅助企业开展消防排查,代替或者减轻工人的劳动强度,能在火灾初期进行安全、快速、有效地进行灭火的一款消防装备。国内外在救火机器人的研究上持续稳定发展,日本目前最为先进的是“消防龙”(Dragon Firefighter)灭火机器人[1,2],如图 1 所示。它的形状类似于一条蛇形,移动横向移动范围大约1.5 m左右,利用自身的红外镜头和光学镜头,找到火源并进行扑灭。

图1 “消防龙”使用场景
德国的甲虫 OLE(Off-road Loescheinhei)消防机器人[3],如图2所示。它能利用装带的水箱和灭火剂执行灭火人任务,并且具有自我保护功能。当靠近火源时,会自动规划路线,及时避开。

图2 OLE消防机器人
国内中信集团研发的防暴消防灭火侦查机器人[2],如图3所示。该机器人集防爆,自动控制,网络和通讯,传感器等技术于一体,实现了图像和语音识别、无线通信和远程控制等一系列功能。

图3 中信研发的防暴消防灭火侦查机器人
研究开发基于小型化用于巡检、扑灭中小型火灾、性价比高的消防机器人在当今社会尤为重要。
1 总体设计方案
携带消防设备的自动巡检消防移动机器人可以实现复杂环境避障、爬坡、跨越沟槽、爬楼梯等自动巡检,同时向总控制部门发出安全警报。该机器人在整体质量、尺寸、速度、工作时间、运动控制等方面需要表 1 性能指标[5,6,7]。

表1 自动巡检消防移动机器人主要技术指标
该机器人包括:行走系统、消防机械臂系统、灭火系统、电源系统、控制台及通讯系统等,总体设计方案示意图见图4。
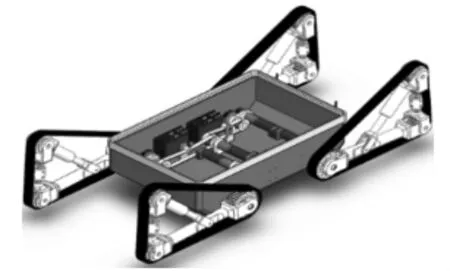
图4 机械总体设计方案示意图
2 行走机构设计
为保证自动巡检消防移动机器人可以正常工作在各种复杂的环境下,因此,要求机器人具有一定的越障能力。
2.1 履带支撑结构设计
履带支撑结构承载着机器人的整个机体,需要驱动机器人进行直线和转弯简单运动,进行越障、爬坡、爬楼梯等多种复杂的运动。本文设计的履带支撑结构主要包括履带、主动轮、从动轮、减震器、支撑架、伸缩杆(L)、伸缩杆(R)、伸缩套等,如图 5所示。

图5 履带支撑结构
履带支撑架的末端装有两个滚动轴承,两个滚动轴承之间装有履带从动轮。支撑架的中部开有一直径8 mm的孔,通过8 mm销钉连接履带减震器。该减震器形同于山地自行车前减震器的机构,使履带支撑架在一定范围能够承受机器人下坠的震动,保证机器人整体运行不受影响。减震器的阻尼比可以通过更换内部的弹簧来调节,以便在使用不同的履带时适应不同的减震需求,防止震动太大导致履带脱离履带轮的情况发生。履带减震器末端装有两个滚动轴承,两个滚动轴承之间装有履带从动轮。在两个履带从动轮之间有一个如图5所示的履带伸缩杆机构。该机构由伸缩杆(L)、伸缩杆(R)和伸缩套构成。伸缩杆(L)一端连接在减震器外部,和连接减震器的履带从动轮是同轴;另外一端为M30×3.5-LH-5g6g-L的螺纹。伸缩杆(R)一端连接在履带支撑杆外端,与连接履带支撑杆的履带从动轮同轴;另外一端为M30×3.5-5g6g-L的螺纹。在螺纹轴之间有一个可以与之相旋合的伸缩套。该零件外直径为50 mm,长度为80 mm,内部有与螺纹轴配合的内螺纹,两头分别是左旋和右旋,套筒的外表面开有8个均匀分布标准内六角槽。装配在两个螺纹轴之间放入弹簧,提供预紧力。使用外六角扳手扳动套筒旋转可以使伸缩杆(L)和伸缩杆(R)之间的直线距离缩短或者加大,从而调节整个履带机构的周长,使履带机构可以配合更多不同种类的履带,还可以进行履带的快速更换,大大提高了机器人的使用范围。
通过外短轴的旋转来带动履带支撑架进行旋转,从而带动整个履带机构可以在一定幅度内的旋转运动。当履带机构旋转到两个履带从动轮间的履带接触地面时,机器人底盘相对于未旋转之前将会大大升高,有利于机器人实现越障、爬坡、上楼梯等功能。
2.2 履带选型
根据履带设计准则,知道履带节距与整体质量有以下对应关系:

式中:t0为履带节距,mm;m为机器人整体质量,m=200 kg。
根据公式(1)得出,t0=49.8 mm,根据机器人使用场合参考厂家履带型号,选用型号为ZRT-100 B消防、反恐机器人橡胶履带,取t0=58.5 mm。
2.3 驱动功率计算
按照力学相关知识和机器人主要技术参数,该机器人在平地上加速运动受力情况如图6所示。

图6 平地上加速运动受力情况
根据受力分析以及机构平衡条件,在驱动力矩Mk和履带牵引力Fk之间存在以下关系:

式中:Fk为牵引力;MK为驱动力矩;Mr为机构内摩擦力矩;R为驱动轮半径,R=70 mm。
Mr是因为机构中的轴承、履带相接触后产生力矩。Mk形成牵引力的时需要克服内部摩擦,主要的摩擦力如下:
(1)履带驱动轮和轴承之间的摩擦力Ff1:

式中:Ff1为驱动轮和轴承之间的摩擦力(N);μ1为履带啮合时摩擦系数,查表μ1=0.06;Mr为机构内摩擦力矩(N·m);Z 为驱动轮啮合齿数,Z=14;F0履带预紧力(N);Fk为履带牵引力(N)。
其中履带预紧力F0和履带牵引力Fk分别为:

式中:m为机器人总质量,m=200 kg;g为重力加速度,取g=9.8 N/kg;Fα为惯性力;α为加速度,α=0.5 m/s2;FR为土壤阻力(N);Fb为启动力阻力(N)。
其中惯性力Fα和启动力阻力Fb为:

式中:λ为土地土壤参数,λ=0.01;v为机器人运动速度,v=2.5 m/s。
(2)履带上部从动轮和轴承之间的摩擦力Ff2:

式中:Ff2为上从部动轮和轴承之间的摩擦力;μ2为滚动球轴承滑动摩擦系数,查机械设计手册μ2=0.02;φ 为履带与水平面夹角,φ =27.94°;Fn1为驱动轮支持力(N)。
(3)履带底部从动轮和轴承之间的摩擦力Ff3,力矩:

式中:Fn为从动轮支持力,N;Mf3为从动轮和轴承之间的摩擦力矩(N·m);r1为从动轮半径,r1=45 mm。
(4)履带导向从动轮和轴承之间的摩擦力Ff4:

式中:Mf4为导向从动轮和轴承之间的摩擦力矩(N·m);φ 为履带与水平面夹角,φ =27.94 °;r2为从动轮半径,r1=45 mm。
整理公式,可得

带入数值计算后可得,驱动轮Mk=28.75 N·m,单个驱动轮Mk=14.38 N·m。
2.4 斜面上加速运动受力分析
根据相关力学知识以及技术指标[6],该机器人在α=30°的斜面上加速运动受力情况如图7所示。

根据受力分析以及机构平衡条件,可得履带牵引力 Fk:

式中:α 为斜面角度,α =30°;Fα为惯性力;FR为土壤阻力;Fb为启动力阻力。
2.5 传动机构设计
直流伺服电机通过减速器降低转速、增加扭矩,通过齿轮或带传动将动力输出到输出轴上,从而带动驱动轮。为了使消防机器人在平坦的地面上快速到达起火地点,在穿越障碍物、爬坡、越障和执行自动巡检任务时需要输出低速、高扭矩。通常设计方式是:每个履带机构的驱动以及履带机构整体的旋转运动都由单独的电机来控制。这种设计结构可以让每条履带具有不同的线速度、每个履带机构都可以独立旋转。如图8所示。

图8 传动机构简图
3 机器人相关性能分析
3.1 机器人爬楼梯过程分析
如图9所示,机器人爬楼梯过程:
(1)机器人在水平地面上移动时,前后履带机构最大面紧贴地面,履带机构和机身都保持水平状态。
(2)当机器人接近第一级楼梯时,前履带机构顺时针旋转抬起到高于第一级楼梯的位置,在驱动轮的驱动下,前履带机构的履带在楼梯边缘上。
(3)机器人继续移动,前履带机构随着机器人的移动变化角度,使整个履带机构都靠在楼梯上。后履带机构顺时针旋转,靠机电扭矩使机器人本体向上抬起。
(4)机器人继续移动,后履带机构靠上第一级楼梯,机身倾斜角度随着履带的移动而逐渐接近楼梯坡度。

图9 机器人爬楼梯过程分析
3.2 机器人跨越沟槽分析
机器人的重心会随着机器人的跨越沟槽运动而不断向前运动。机器人跨越沟槽的运动示意图如图10所示,按机器人重心相对于沟槽的不同位置,可分为以下几种情况:
(1)当重心未跨越沟槽时,机器人可以正常行驶。
(2)当重心接近沟槽的边缘时,机器人就可能会因为重心不稳而出现向前翻到的趋势,进而摔入沟槽,发生事故。
(3)当重心完全跨越过沟槽时,机器人可以安全跨越。

图10 跨越沟槽示意图
根据机器人跨越沟槽示意图得

式中:L为履带驱动轮与重心之间的距离;r为履带重心变化范围的半径;h为重心垂直高度;α为斜面角度,αmax=30°;带入数值计算得,Lmax=500 mm。
4 结论
(1)设计使履带移动和履带机构转动互不干涉的履带机构,选择适合消防要求的履带。进行履带机构在不同运动过程中受力分析,使机器人满足复杂地形的技术要求。确定履带行走系统的传动机构,对传动部件进行简化。
(2)对机器人直线运动、转向运动、爬坡运动、爬楼梯过程、跨越沟槽等复合运动进行分析。
