地铁CBTC信号系统设计分析
2019-12-25丁文君
丁文君
摘 要:文章基于通信的列车控制系统的设计原理,依据系统的移动闭塞功能分类,结合西安地铁2号线的隧道运行情景,阐释基于通信的列车控制系统的应用设计方案,重点分析了列车精准定位、虚拟占用及TDD-LTE移动通信技术的应用性,以为多列车混合运行的安全监测提供有效支撑。
关键词:列车控制信号系统;移动闭塞;分时长期演进技术;信号干扰
1 CBTC系统的基本构成
基于通信的列车控制系统(Communication-Based Train Control,CBTC)源于欧洲连续式列车控制系统,随着计算机、无线通信和自动化控制技术的发展,该系统在技术和应用上得到突破性的发展,并成为国内外城市轨道交通的神经中枢,是确保地铁车辆安全运行的应用支撑。CBTC系统与轨道电路相互独立,通常采用基于802.11系列协议的无线局域网(Wireless Local Area Networks,WLAN)组网,进行车地的双向、连续、大容量数据通信,该种通信方式具有可移动、成本低、易于部署等特点,便于实现移动闭塞。
整体而言CBTC系统由地面设备和车载设备两大模块构成,且两者可以通过数据通信网络进行车地的双向通信,以此构成整个系统的主体功能框架。系统中配设了自动列车监控系统(Automatic Train System,ATS),可用于监控列车运行、信号设备等情况,管理运行图、排列进路。在CBTC系统中还设置了计算机联锁子系统,利用专门的控制软件对车站信号、进路、道岔之间的联锁关系进行处理,并可自动采集、处理相关信号,将地铁车站运行中的操控指令和信息输入计算机,根据内置的计算条件便可实现对联锁关系的逻辑运算和判定,而后,可根据计算结果输出,指令执行设备和机构完成对列车运行的监控。
2 CBTC系统的移动闭塞技术的模式分类
CBTC系统可基于车地双向通信,通过连续检测先行列车的位置和速度,实现移动闭塞,其应用设计原理是后续列车以前行列车尾部为追踪目标点,在最小安全追踪间隔距离下,实现安全运行。设定前后两列车的最小间隔距离为S,其速度、减速度、空走时间各为V1,V2,B1,B2,T1,T2,据此可得:
结合式(1),CBTC系统移动闭塞模式下,若前行列车的B1减速度为无限大,T1空走时间为0,此时前后列车的最小安全间隔为:
利用式(2),可求解得出后续列车的安全运行速度,因为该移动闭塞模式无需考量前行列车的速度,仅需关注列车位置的处理方式,故而,定义为相对位置模式。同时,若式(1)中距離S给定,由前行列车的速度V1可获得后续列车的速度V2,对相同车型而言,若空走时间一致,则列车间的速度可视为均衡,即行车间隔近似0,因为该模式以列车的限度速度及位置来确定后续列车的安全运行速度,故而,定义为相对速度模式。
3 CBTC系统在地铁工程中的应用设计
根据上述分析,CBTC系统的移动闭塞技术存在不同的应用模式,而基于西安地铁2号线工程运行稳定的要求,系统设计时采用相对位置的闭塞模式,通过自动环段、列车定位、分时长期演进(Time Division Long Term Evolution,TD-LTE)车地移动通信等技术,完成安全间隔内列车的安全运行,以缩短车辆运行距离,提高地铁的承运能力。
3.1 车地通信网络的优化设计
结合西安地铁2号线工程的特点,为满足不同隧道情景的线路条件,简化CBTC系统应用,该地铁采用相对位置的移动闭塞模式,利用“车地通信”和“列车定位”技术,将地面设备和受控列车融合为一体,基于最小安全间隔来灵活调控列车运行能力,而不再依赖于轨道电路。此时,列车安全间隔为动态的,后续列车跟据前行列车的位置和速度而随时变动,以确保列车的安全制动距离,规避“追尾”。鉴于CBTC系统的车地通信多采用802.11系列协议的WLAN组网,虽具有成本低、易部署的特点,但其多采用2.4 GHz或5.8 GHz频段,且以天线、波导管及漏缆等作为通信媒介,而现有移动终端设备也采用2.4 GHz频段,无法规避无线通信之间的干扰问题。针对此,可在原有WLAN基础上,以兼容方式应用TDD-LTE移动通信技术,构建两套TDD-LTE网络承载CBTC系统的车地通信,在承载多业务和频率资源的条件下,A网采用PIS 10 MHz带宽,综合承载CBTC系统、PIS、车载监控整设备的数据传输,B网另行运行5 MHz带宽,以单独承载CBTC业务的数据传输。
CBTC系统下,西安地铁2号线的列车段线路原来布设为“灯泡线”,但是由于车地通信重新设计之后采用A网、B网冗余配置方案,即A,B网同时运行,轨旁AP天线方向在整个线路固定设置,列车头尾对应轨旁的无线A网、B网固定配置天线,车载的A,B网天线只能与轨旁A,B网的AP天线进行通信,若列车通过“灯泡线”,转向另一线路,可能产生车头车载B网天线、车尾车载A网天线分别对应轨旁的无线A网、B网的AP天线,影响车地正常通信。为解决该问题,可在车头车尾配设4个AP天线,通过自动换端实现A,B网的调换,确保车地的正常通信[1]。
3.2 列车追踪间隔设计
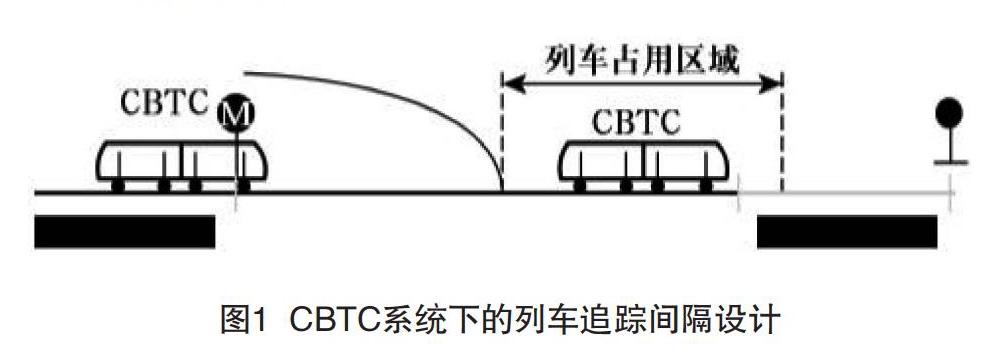
CBTC系统设计时,因移动闭塞存在不同应用模式,在西安2号地铁中,在工期和运行稳定性的双重要求下,该地铁将采用相对位置的移动闭塞模式,利用系统坐标的概念描述列车位置。例如以“R1,S12,+24”描述了列车在1号区域、12号轨道单元、正向24 m位移的位置。运用轨旁置信标作为相对位置校验,依据工程线路调配适宜的位置,将列车位置描述的误差性控制在12 m。同时,通过CBTC系统模拟运行,西安2号地铁列车的最小追踪间隔为90 s,运行交路折返路的能力需达到105 s要求。移动闭塞技术应用下,设计的列车追踪间隔如图1所示。
CBTC在地铁工程应用设计时,将联锁、计轴、信号机、信标、无线通信等轨旁设备融合为一体,让CBTC系统可准确识别和判定进路中列车的位置,进而根据移动闭塞的追踪间隔对装备列车进行监控,并给予连续性ATP防护,对于存在通信故障的装备列车、未装备的列车均由司机根据站间闭塞要求控制列车,并给予防闯红灯的防护。为实现两种列车驾驶模式的自动切换和选择,车载系统整合了CBTC设备和闯红灯防护设备,如此,各列车可依据自身情况运行,在轨旁设备监控下不同列车可以混合运行方式获得同步监控。
3.3 列车位置精准定位设计
运行列车运行位置的精准定位,关系虚拟占用的形成、列車冲突点的设置、运行间隔的调整,故而,需对列车位置进行检测和校验。西安地铁2号线在CBTC系统设计中,车载设备可采用测速传感器,依据轮周长原理,计算列车位移,且为规避列车运行打滑空转造成的位移误差,利用多普雷达车辆位移检测进行误差补偿。同时,为确保列车位置识别,可运用车载轨道数据库中的电子地图,融合地面信标读取器的信标信息读取,将读取的信息与电子地图对比,完成列车位置的定位[2]。
列车位置定位中,为实现精准定位和多列车移动闭塞区间内的安全运行控制,线路信息及轨旁设备安装的精度设置如下:线路曲线及坡道信息为0.03 m,道岔岔尖位置为0.10 m,信号机位置为0.10 m;计轴器位置为0.10 m,标准信标位置为0.08 m,精确信标位置为0.025 m,轮径效验信标位置为0.08 m/0.06 m。
4 结语
随着城市轨道交通的创新建设,依托于计算机、无线通信技术发展而来的地铁CBTC系统得以深化应用,而西安地铁2号线正是采用该种移动闭塞的CBTC列车自动化控制系统。为实现系统的优化应用,完成列车位置准确定位、排除WLNA通信干扰问题,上述结合应用地铁的特点,就CBTC系统运营过程中面临的技术难题进行分析,从列车定位、追踪间隔、车地双向通信等几个技术层面,进行了应用设计分析,可为相关问题的解决提供有效指引。
[参考文献]
[1]赵剑华.一种集中冗余式架构CBTC系统方案的设想[J].铁路通信信号工程技术,2019(8):65-68.
[2]丁军.浅谈地铁信号系统的施工技术要点及调试[J].通讯世界,2019(8):70-71.
