微纳操纵成像系统的线性自抗扰控制器设计
2019-12-17吴文鹏王一帆赵庆旭
吴文鹏,王一帆,赵庆旭,胡 贞
(长春理工大学 电子信息工程学院,吉林 长春 130022)
0 引言
微纳操纵成像系统是纳米检测领域主要执行机构,其任务是根据被测样品与系统中纳米级探针之间的范德华力进行扫描成像来得到样品的表面轮廓图像[1]。其中控制器主要将范德华力转化的电压值信号作反馈信号,利用控制算法让扫描器在三维方向上移动[2]。微纳操纵成像系统存在非线性及操作复杂性等特点,选择不合适的控制算法,会损坏样品和探针,故选择合适控制算法提高微纳操纵成像系统控制精度非常重要。
现有的微纳操纵成像控制系统一般采用传统比例积分(PI)控制器进行闭环控制,该算法存在控制精度低,抗扰动能力低,参数调节难等缺点,易导致成像图形出现划痕、畸变现象,因此,许多学者展开了新的研究。李丹等[3]提出了基于迭代学习控制的成像方法研究,有效改善了系统非线性和外在扰动带来的影响;王一帆等[4]提出了基于模糊自适应PI控制的策略,获得良好的控制效果;魏强等[5]提出了显微镜微位移平台的神经网络比例积分微分(PID)控制法,其提高了成像图像质量;方勇纯等[6]提出将学习控制算法和PI相结合的先进控制模式,提高了系统的控制精度。而韩京清提出的自抗扰控制理念,既保留了PID控制基于输入、输出消除误差的优点,又加入现代控制思想,对系统内在扰动和外在扰动进行估计并消除补偿,提高了系统的抗扰动能力和鲁棒性[7]。但是自抗扰控制所需参数过多,不利于工程实际应用,而线性自抗扰控制不仅继承了自抗扰控制的优点,且所需调节参数也少,所以,本文利用线性自抗扰(LADRC)控制法提高微纳操纵成像系统的抗扰能力和控制精度,并通过Matlab/Simulink平台的仿真实验验证了方案的有效可行性。
1 微纳操纵成像系统
1.1 系统的结构
微纳操纵成像系统原理是在扫描过程中保持探针尖端与样品间电压值恒定,即两者间的距离相等。微纳操纵成像系统结构由计算机控制器、四象限光斑传感器、微悬臂和压电陶瓷微位移平台组成(见图1)。图中,e(t)为反馈量,g(t)为经过计算机控制器计算后的新变量值,G1(s)为压电陶瓷微位移平台的数学模型,G2(s)为微悬臂和四象限的数学模型。

图1 微纳操纵成像系统结构框图
1.2 系统的传递函数
按照图1所示,对压电陶瓷微位移平台、微悬臂、四象限光斑传感器分别进行建模和仿真。
1.2.1 压电陶瓷微位移平台
对实验室自主研发的微纳操纵系统中压电陶瓷部分进行建模,取阶跃信号为0.1 mV,采样时间为0.04 ms时,压电陶瓷的电压值随时间的变化情况(见图2(a))。图中,电压值由0上升到0.1 mV只需0.02 s,且无超调产生,并在Matlab中用平滑滤波法(Savitzky-Golay)对图2(a)的数据进行滤波,得到曲线如图2(b)所示。

图2 压电陶瓷微位移平台响应曲线图
在Matlab中调用System Identification工具箱对图2(b)的数据进行辨识拟合,最终得出压电陶瓷微位移平台的二阶传递函数:
(1)
式中s为新的空间变量。
1.2.2 微悬臂
微悬臂的建模是采用光斑偏转法,其原理结构简单,如图3所示。开始状态下,激光器发射激光至微悬臂梁上,反射到四象限光斑传感器面上中心点O处,当探针逐渐靠近样品时,受到范德华力影响,微悬臂会发生形变偏转一定角度[8],偏转量记为Δx,偏转角为θ,对应反射角为2θ,反射激光点由中心点移至O′点。设探针微悬臂长为d,反射长为p,O点到O′点位移为Δy,因四象限传感器敏感性能远小于样品表面起伏变化,可用近似公式表示为
(2)
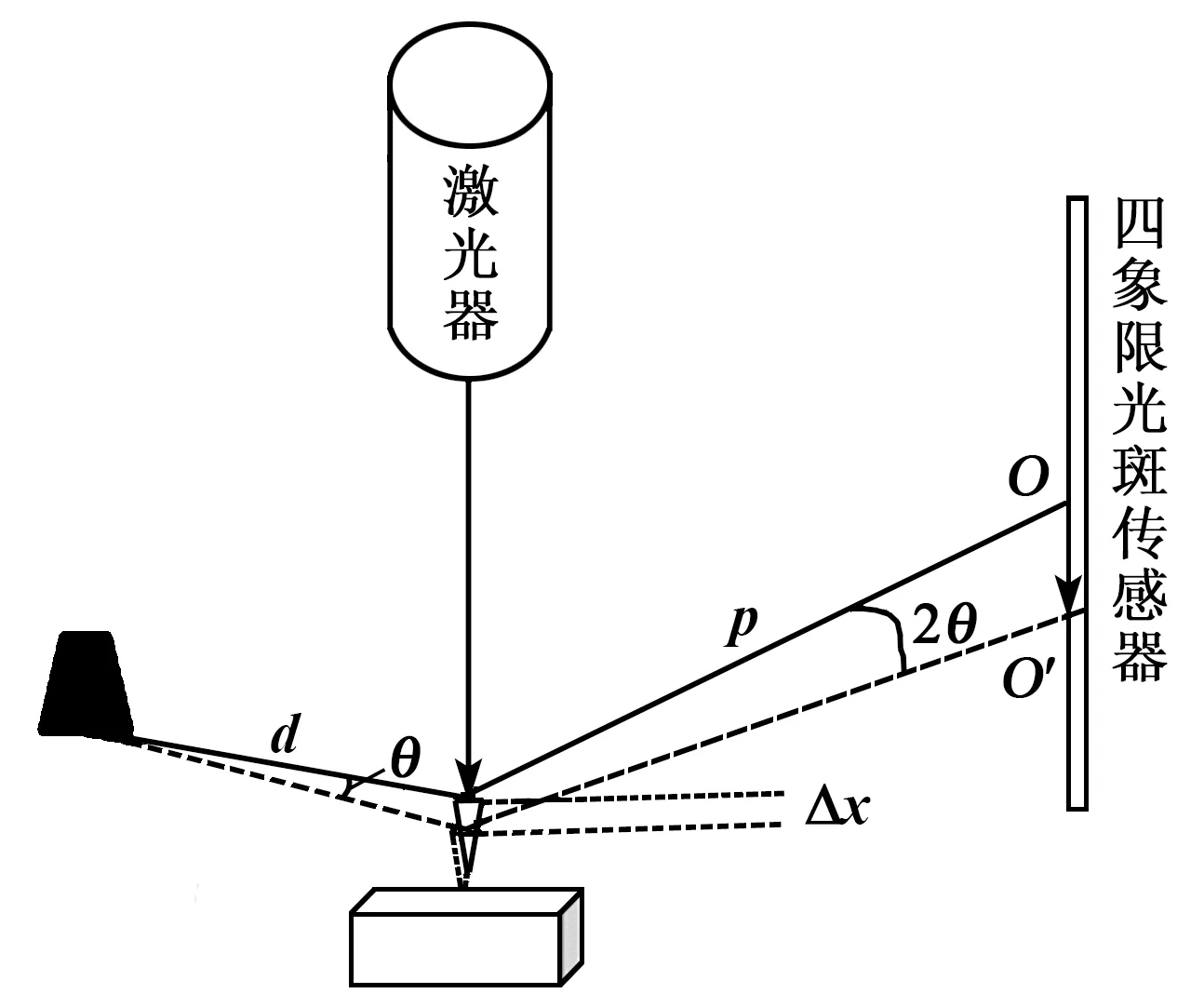
图3 光斑偏转法原理结构图
在实验室自主研发的微纳操纵系统中,d=450 μm,p=10 cm,则可得出放大倍数K1为444.44。
1.2.3 四象限光斑传感器
利用光斑位移量与四象限光斑传感器探测的电压值之间数学关系建模。保证光斑位置不变,通过手动移动四象限光斑传感器平台,由于四象限光斑传感器的对称性,只需进行水平轴方向移动即可。首先移动平台向右,即光斑位置相对平移向左,然后反方向重复相同动作,每次移动0.05 mm,记录每次位移的电压值,选择有用数据,用Matlab拟合工具进行数据拟合,得到一阶比例传递函数。图4为光斑传感器建模拟合图。模型公式为
f(x)=883.7x-19.92
(3)

图4 光斑传感器建模拟合图
1.3 微纳操纵成像系统模型
根据上述光斑检测系统建模分析可知,微悬臂系统可看成线性放大环节,放大倍数K1为444.4。四象限光斑传感器部分仍是一个比例环节,增益K2可看作为-1~1 mm的电压变化率,K2=0.883 7。由此可知G2(s)为
G2(s)=K=K1×K2=444.44×0.883 7=
392.756
(4)
在微纳操纵成像系统中,各部分传递函数已知,由图1可得系统传递函数,则有
G(s)=G1(s)·G2(s)=
(5)
2 线性自抗扰控制器设计
微纳操纵成像系统线性自抗扰控制器由跟踪微分器、线性误差反馈控制率、线性扩张状态观测器3部分组成[9],如图5所示。图中,R(t)为输入量,Y(t)为输出量,Z1、Z2、Z3为观测器状态量,e1、e2为线性反馈环节的输入信号,u0为线性反馈环节的输出信号。

图5 线性自抗扰控制器原理图
2.1 跟踪微分器设计
为了避免初始控制量较大突变导致控制饱和,且能够有效解决被控对象的快速性与准确性之间的矛盾,可通过跟踪微分器(TD)对给定信号进行预处理,有利于降低超调且快速精确跟踪。跟踪器原理为
(6)
式中:R为输入信号;R1为过度过程;R2为过程微分量;fhan为二阶最速控制综合函数;r0为速度因子;δ0为滤波因子。
2.2 线性扩张状态观测器设计
将二阶传递函数写成微分方程的一般形式为

(7)

(8)
加入观测器误差增益矩阵L,则二阶系统的状态空间表达式为

(9)
其中
(10)
(11)

(12)
(13)
综上所得,系统线性扩张状态观测器为
(14)
选择极点配置法,设置ω0为观测器带宽,即可将系统状态观测器均配置在-ω0点,得出观测器的频域为
det(sI-(A-LC))=s3+L1·s2+
L2·s+L3=(s+ω0)3
(15)
其中
(16)
式中I为单位矩阵。
2.3 线性误差控制率设计
经过状态扩张观测器对扰动的估计和补偿,采用比例微分(PD)控制器即可对系统进行误差控制,控制器为
(17)
式中:kp为比例系数;kd为微分系数。
在系统中设置参数kp、kd,可以用调优闭环临界阻尼方法和所需稳定时间Tsettle方法,即使系统得到一组负实双极。现代控制理论中,ω0=(3,…,10)ωc,ωc为期望闭环系统的带宽,本文取ω0=5ωc,即观测器的希望极点与虚轴距离为系统的希望极点距虚轴距离的5倍[11],则有
(18)
由式(6)~(18)可知,线性自抗扰控制器最终只需要调整ωc、ω0、b03个参数,整定参数方便,便于实际应用。
3 仿真与结果分析
为了验证线性自抗扰控制器对微纳操纵成像系统控制效果,在Matlab/Simulink环境中建立微纳操纵成像系统模型,并搭建线性自抗扰控制器、PI控制器和给定信号模块,对系统进行闭环控制的数值仿真。图6为微纳操纵成像系统仿真图。由图可知,状态观测器模块(esoconst)在Matlab编辑器中编写S函数。
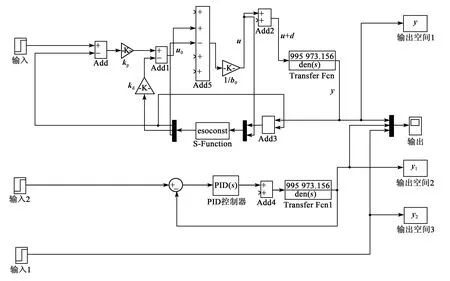
图6 微纳操纵成像系统仿真图
首先设置线性自抗扰控制器和PI控制器调节时间均为0.05 s,则由式(16)、(18)可得ωc=400,ω0=2 000,kp=150 000,kd=800,在命令栏输入,L1=6 000,L2=12×106,L3=8×109,再由文献[12]所提供基于自抗扰参数下的PI控制器参数方法,得出k′p=0.017 948 45,k′i=0.446 493 06,给定阶跃信号,如图7所示。
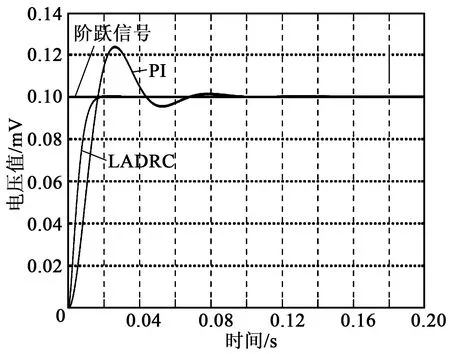
图7 相同调节时间阶跃响应
当保持线性自抗扰控制器调节时间为0.05 s,PI控制器调节时间为0.15 s时,得出其阶跃响应如图8所示。

图8 不同调节时间阶跃响应
由图7,8可知,PI控制器不能同时兼顾快速性和准确性,由此可见,线性自抗扰控制器具有较好的动态性能。
图9为输入正弦波信号时,控制器参数保持不变,得出跟踪效果和误差。
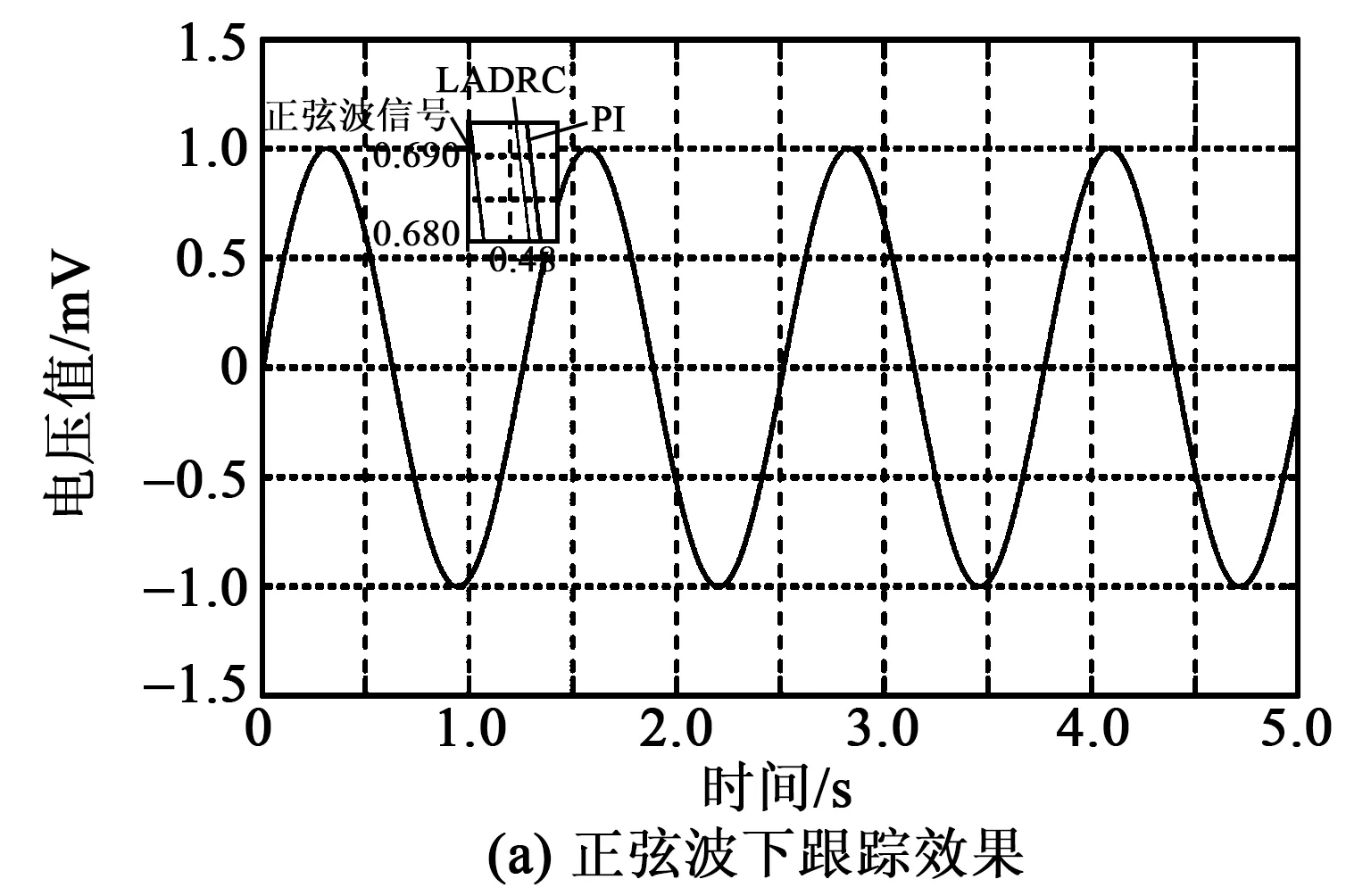

图9 正弦波给定控制器控制效果
由图9可知,线性自抗扰控制器输出波形接近给定输入,PI控制器误差较大。由此可见,线性自抗扰控制能提高控制精度。
第二步验证控制的抗扰动能力,在仿真开始时,对两控制器同时施加正弦干扰信号[13],其结果如图10所示。

图10 扰动信号下控制器控制效果
由图10可知,在正弦扰动下,线性自抗扰控制器误差约±0.08 mV,PI控制器误差约±0.35 mV,由此可见线性自抗扰控制有较好的抗扰动能力,而PI控制器不能很好地对系统扰动情况下做出及时调整,不能保证成像系统的控制效果。
4 结束语
本文搭建线性自抗扰控制器,即保留了基于PI控制误差优点,又能利用线性状态扩张器及时估计并消除扰动,获得了较好的控制效果。在Matlab/Simulink平台下,很好地验证了线性自抗扰控制提高系统抗扰动性及控制精度的能力,为具体应用到实际平台中提供了一种有效的方案。
