自行车行驶安全警示系统设计
2019-12-12黄秋婷杨智黄子君
黄秋婷 杨智 黄子君

摘 要 目前国内外针对自行车安全警示系统的设计还不够完善,市面上出现的安全警示装置虽然精度很高,但同时价格也较为昂贵。为此设计一款性价比比较高的安全警示系统。本文基于STM32微处理器设计一款自行车行驶安全警示系統,从速度与距离这两个方面进行衡量,综合确定自行车当前的安全状态。测距技术采用US-100超声波模块测距,测速技术采用光电测速。经仿真测试,系统能较为精确的测量与障碍物的距离,以及当前行驶速度。本设计具有一定的实用价值。
关键词 STM32 安全行驶 警示系统
中图分类号:F224.1文献标识码:A
0引言
随着经济的快速发展,生活节奏日益加快,由于缺少运动许多人被亚健康所困扰,再者随着城市交通压力的增加,人们意识到汽车出行尾气等弊处,开始提倡绿色出行,因此越来越多人选择自行车作为出行或者上班的交通工具,但是自行车过程中安全系数仍有待提高,市场上出现一种对磁场敏感性元件霍尔元件以及红外测距来提高自行车行驶的安全系数,但在测速以及测距方面仍存在不足之处,为此本文基于超声波测距模块和单片机控制系统及显示模块和LED灯预警装置判断与障碍物距离,完成警示作用,采用测速传感器。
1系统方案
本系统采用模块化设计,分为测速模块、测距模块、报警装置、调速模块以及人机接口模块,系统结构图如图2.1所示。
测距采用超声波技术。超声波模块选用US-100,其距离测量范围为2cm至4.5m,工作电压2.4V至5.5V,感应角度小于15度。测速采用无接触光电传感器,其具有精度高,反应快等优点。显示模块采用型号为SSD1306的OLED屏,其具有安装空间小、功耗低等优点。
2硬件设计
2.1微处理电路
微处理电路主要由下载电路、复位电路、稳压电源、时钟电路组成。STM32上引脚PA2,PA3,PB10,PB12连接超声波模块;PC13对应Key0按键接口; PB1,PB5,PB8连接报警装置;PC6,PB12,PB13,PB15用于连接OLED屏;PA8是PWM输出口;PA9 用于调节车轮转向;PB7与测速模块连接。
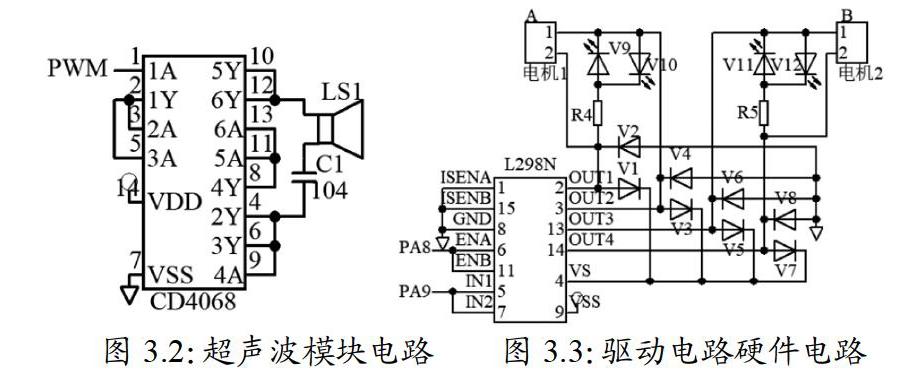
2.2超声波电路
STM32的PA2、PA3 可用于串口通信,分别为TXD和RXD,由于本系统需要两个超声波,另一个超声波的TXD与RXD接STM32的B10与B11引脚。本设计中将这两个I0配置成串口通信模式,超声波模块发送PWM电路如图3.2,超声波接收电路是发送电路的对称电路,故电路和图3.2相同。
2.3 L298N硬件接口
因为要驱动两个自行车车轮转动,必须要有两个使能端口以及输入信号端口,因此使能端ENA与ENB相连接单片机引脚口PA8口,IN1与IN2同时接PA9,驱动模块输出接电机1与电机2,两电机模拟自行车车轮,V1至V8二极管起到续流保护的作用(反电势),硬件电路连接如图3.3。
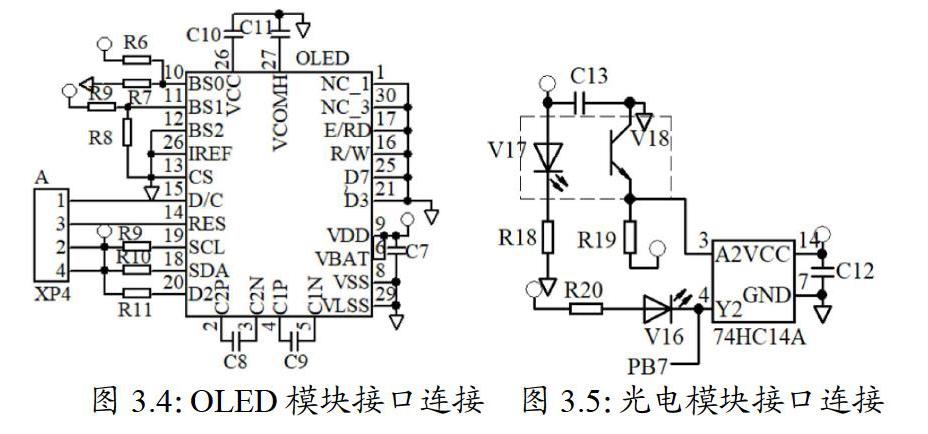
2.4 OLED显示屏接口
控制输入数据/命令引脚DC接单片机PB12口,复位REST接单片机PC6口,时钟引脚SCL接单片机PB13口,数据口SID接单片机PB15口,因此与单片机连接只需四个口线,节省IO口,模块接口连接如图3.4。
2.5 光电测速接口
测速模块OUT引脚与单片机引脚PB7相连,PB7引脚口配置为输入形式,以1us的时间频率不断检测OUT引脚输出的电平大小,OUT相当于数字开关,当遮光区有遮挡物时相当于关状态,无遮挡时相当于开状态,连接电路如图3.5。
2.6 报警装置接口
由于自行车分为前后轮,故本系统采用两个LED灯,分别判定前后轮的安全距离,车前LED引脚连接单片机PB1引脚,后轮LED引脚接单片机PB5引脚。蜂鸣器与单片机连接引脚为PB0,检测速度超速时报警,警示装置电路如图3.6。
3软件设计
本系统代码主要是对PWM,OLED,URSTER串口,KEY、报警装置(LED、蜂鸣器)分块编写子函数,在main函数中调用。
测距部分,先进行串口初始化,分别对时钟使能、模式设置、参数初始化以及编写中断函数,本系统使用串口2和串口3,单片机串口发送指令给TX端口,超声波模块便可以发送超声波脉冲,检测到回波信号,之后对当前温度测量进行校正,将校正后的结果通过RX管脚输出,输出距离值共有两个字节,需要分为高低位进行传输,设高8位为Hdate,低8为Ldate,得出的结果为毫米,最后距离值为(Hdate*256+Ldate)mm,将所测距离与单片机设置的安全距离进行比较,当测得的距离超过安全距离时,启动报警装置。
测速部分,先进行定时器1控制占空比从而调节速度快慢,本系统设置四个档位速度,接着采用定时器3计数方式,计算电机经过一圈所需时间t,当电机接上外轮,此时电机带有车轮,便可知道其外接轮子的周长大小s,速度公式为v=s/t,便可得出自行车行驶速度大小,将所测的速度与单片机设置的安全速度进行比较,当所测的速度大于单片机设置的最大速度时,启动报警装置,软件流程图如图4.1。
4实验分析
自行车行驶安全警示音控系统经过实验,不断完善达到了预期的效果,对于自行车安全警示音控系统设计和实现过程主要集中在以下几点:对自行车行驶安全距离以及安全速度进行检测,当自行车的当前行驶速度超过安全速度则发出蜂鸣器报警,若当前自行车车身与障碍物距离小于3米,则发出LED灯光报警,图5.1为实验平台,图5.2为OLED显示实验所测距离及速度参数。
测试超声波模块时,当障碍物与传感器距离小于设定安全距离时,对应的LED灯报警。为验证所测距离的准确度,将实际距离和超声波测距进行多次比对,随机挑选4个距离数据分别是4252mm,3252mm,2610mm,760mm;实际距离值分别为4232mm,3251mm,2613mm,476mm。所有数据误差均在1%范围内。
通过实验对比发现超声波测距误差非常小,其能够精确的测出自行车前后车身与障碍物的距离,且测量响应速度非常快。
速度模块测试,选择四个模拟速度进行观测,模拟的速度大小分别为12m/s,8 m/s,5.5 m/s,3 m/s;实际测量速度分别为11.859m/s,7.96 m/s,5.49 m/s,3.01 m/s。对比速度数据可知,随着速度增大,测量误差也会相应增大。最大误差出现在模拟速度为12m/s时,误差为1.17%。实验表明测试模块的测量精度非常高。实际中自行车安全的行驶速度范围为3m/s至8m/s,如果行驶超过10m/s时视为严重超速,危及人身安全,系统便启动蜂鸣器报警。
5结束语
本文基于STM32F103的自行车安全警示装置能高精度检测距离及行驶速度,其性价比高、安装简单,具有一定实用性。
基金项目:课题:湖南文理学院科研项目:无线光通信中的信标光捕获跟踪方法研究(15YB03);湖南省教育厅项目:强电磁干扰环境下的CDMA电磁测深技术研究(18C0741)。
作者简介:杨智(1986-),男,汉族,湖南株洲,硕士研究生,助教,研究方向:通信系统与信号处理。
参考文献
[1] 丁思发,詹清辉.基于霍尔传感器自行车测速系统的设计[J].系统实践,2018(07).
[2] 唐伟,陈金鹰,刘剑丽.基于AT89S52单片机的测速仪设计[J].中国集成电路,2012,21(11):77-82.
[3] 刘国兰.基于霍尔元件的测速装置设计[J].电子技术,2017(05).
[4] 郝玉楠,纪昕洋,马晴.基于超声波测距技术的车辆防刮蹭预警系统的设计[J].理论与算法,2018(12).
