可调节式甘蓝钵苗取苗末端执行器设计与试验
2019-12-06申大帅宋春波
韩 豹 申大帅 郭 畅 刘 俏 王 欣 宋春波
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
甘蓝是我国主要蔬菜品种之一,其播种面积已超过25.3万hm2,在我国蔬菜种植面积中位列第3位[1]。而我国蔬菜机械化水平较低,严重影响着蔬菜种植业的可持续发展[2]。当前,育苗移栽依然是蔬菜产业的主要种植方式,应用于全球约60%的蔬菜种类[3],但移栽机械的用苗要求与钵苗育苗工艺之间的结合尚不完善。甘蓝以穴盘育苗为主要育苗方式,文献[4-5]针对不同穴盘规格与基质对甘蓝育苗的影响进行了研究,但目前针对甘蓝钵苗配套的自动移栽机械及其末端执行器的研究报道较少。
取苗末端执行器是育苗移栽机械的关键部件,是实现钵苗全自动移栽的重要组成部分[6-7]。美国、日本、荷兰等国家钵苗移栽装备较为成熟[8]。文献[9-12]开发了应用于不同蔬菜及花卉移栽的取苗末端执行器。国内学者近年来也进行了针对性的研究[13-17]。以上取苗末端执行器主要针对某种特定穴盘规格进行应用。当前我国甘蓝育苗常用秧盘有72穴、128穴和200穴3种规格,其钵苗栽植主要应用半自动移栽机械完成,即通过人工将钵苗由育秧盘内逐个取出并投放到移栽机栽植器内,然后再由机械完成后续栽植和镇压等工作,人工喂苗劳动强度大,作业环境差。为此,本文结合甘蓝穴盘苗的结构特点,设计一种插入针间距可调的针式钵苗末端执行器,对甘蓝育苗常用的3种规格穴盘所育钵苗开展取苗试验研究,以期提升甘蓝钵苗半自动移栽机技术水平,解决人工喂苗劳动强度大问题。
1 取苗末端执行器总体结构与工作原理
取苗末端执行器的机械结构如图1所示,该执行器主要由电动推杆、安装架、调节滑块、针座、弹簧、取苗针和推板等组成。其中,安装架可在固定板四角的矩形管中竖直上下移动,根据钵苗的高度调节机构的取苗空间,然后通过紧定螺钉进行限位固定,以适应不同苗高的取苗要求。调节滑块也可在安装架下端倾斜部分沿倾斜角度上下移动,通过改变调节滑块与推板之间距离,对弹簧进行预紧,保证投苗时取苗针在根钵中能够顺利拔出。同时,针座安装在调节滑块的卡槽中,并可沿卡槽方向移动,实现对入土宽度的调节,以满足大、中、小根钵取苗要求。该末端执行器取苗工作原理是通过电动推杆的伸出,带动推板下压,弹簧压缩,轴承在滑轨中滑移,使4根取苗针倾斜插入根钵,在取苗机构的带动下取出钵苗,电动推杆回缩,取苗针在弹簧的作用下回缩直至脱离根钵,完成取苗放苗的过程。

图1 甘蓝钵苗取苗末端执行器结构图Fig.1 Structure diagram of end-effector of cabbage seedlings1.电动推杆 2.固定板 3.紧定螺钉 4.推板 5.滑轨 6.转向轴承 7.弹簧 8.安装架 9.螺栓 10.调节滑块 11.针座 12.取苗针 13.挡苗板 14.卡槽
该执行器用于甘蓝钵苗的稀植作业,取苗过程如图2所示,具体操作过程如下:
(1)在一个取苗过程的起始点(图2a),为了减少末端执行器对钵苗茎叶的损伤,从钵苗的一侧沿垂直穴盘的方向进给,到达取苗高度后,穴盘在进给机构的控制下把钵苗送到取苗点(图2b)。
(2)钵苗到达取苗点后,4根取苗针下端针尖处与根钵四角相对,此时钵上植株部分处于机构内部空间的中心位置,不会受到挤压碰撞。并根据根钵规格对取苗针的入土宽度进行调节,以满足根钵取苗要求。
(3)电动推杆伸出,带动推板向下运动,在倾斜滑轨与转向轴承的作用下,弹簧被压缩,取苗针从根钵四角处以最大深度倾斜插入根钵内(图2c)。
(4)取苗末端执行器在取苗装置的带动下沿垂直于穴盘方向上移,根钵在取苗针的作用下脱离穴盘,从而将钵苗从穴孔中取出(图2d)。
(5)末端执行器把取出的钵苗移送到放苗位置(图2e),电动推杆向上缩回,带动推板上升,弹簧复位,取苗针回缩,在挡苗板的反推作用下,取苗针从根钵中拔出,完成投苗过程(图2f、2g)。
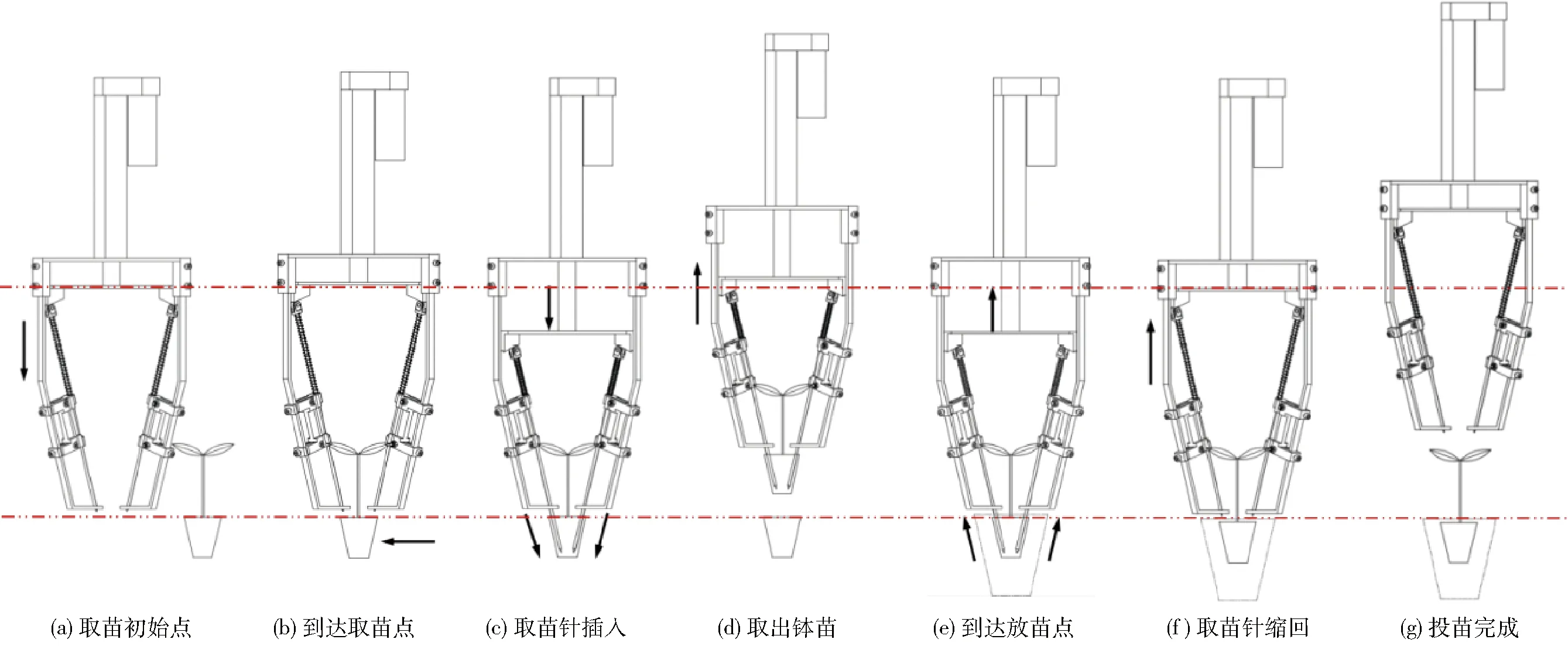
图2 甘蓝钵苗取苗末端执行器取苗投苗过程示意图Fig.2 Schematics of seedling process of end-effector for cabbage seedlings
2 取苗末端执行器结构设计与参数确定
取苗末端执行器主要用于全自动蔬菜钵苗移栽机自动取苗投苗作业。常见的取苗末端执行器按驱动方式可分为气动驱动、电机驱动、电磁驱动3种形式[7]。气动驱动末端执行器结构简单、便于控制,但控制方式单一,难以实现速度的准确控制和位置的精准定位,且不便于移动;电机驱动末端执行器可以实现位置和速度的精确控制,但控制相对复杂;电磁驱动末端执行器通过给线圈励磁使铁心做往复运动,其结构复杂,当前应用较少。本研究采用电机驱动的方式,以保证对取苗速度的准确控制。电机选用永磁直流电机驱动的电动推杆,额定功率30 W,额定推力150 N,行程100 mm,速度60 mm/s,自带机锁和限位开关,通过调节外部控制器来满足行程要求的正负极转换。
取苗针是末端执行器关键的部件。一般有2针、3针、4针,针数越多取苗越稳定[7, 13],本研究选用4根取苗针。由于在取苗过程中根钵的四角阻力最大,则使取苗针采用向心式从根钵的四角插入,利用倾角取出钵苗。为确定取苗针的直径,选取1~4 mm不同直径的取苗针以0.5 mm为间隔分别对72穴、128穴、200穴钵苗进行探究试验。试验结果表明,1~2 mm的取苗针直径较小,取苗针的刚性较差,易弯曲,且与基质接触受力面积较小,取苗稳定性差;3.5 mm和4 mm的取苗针直径较大,取苗针在插入根钵过程中钵体容易破裂且增大对根系的损伤。综上所述,由于不同规格穴盘的钵苗质量与体积不同,72穴钵苗选用直径3 mm取苗针,128穴和200穴钵苗均选用直径2.5 mm取苗针。取苗针材料为不锈钢。
为减小末端执行器的质量,调节滑块与针座选用尼龙材料,固定板、推板和安装架均使用铝合金材料,取苗末端执行器的结构参数如图3所示。
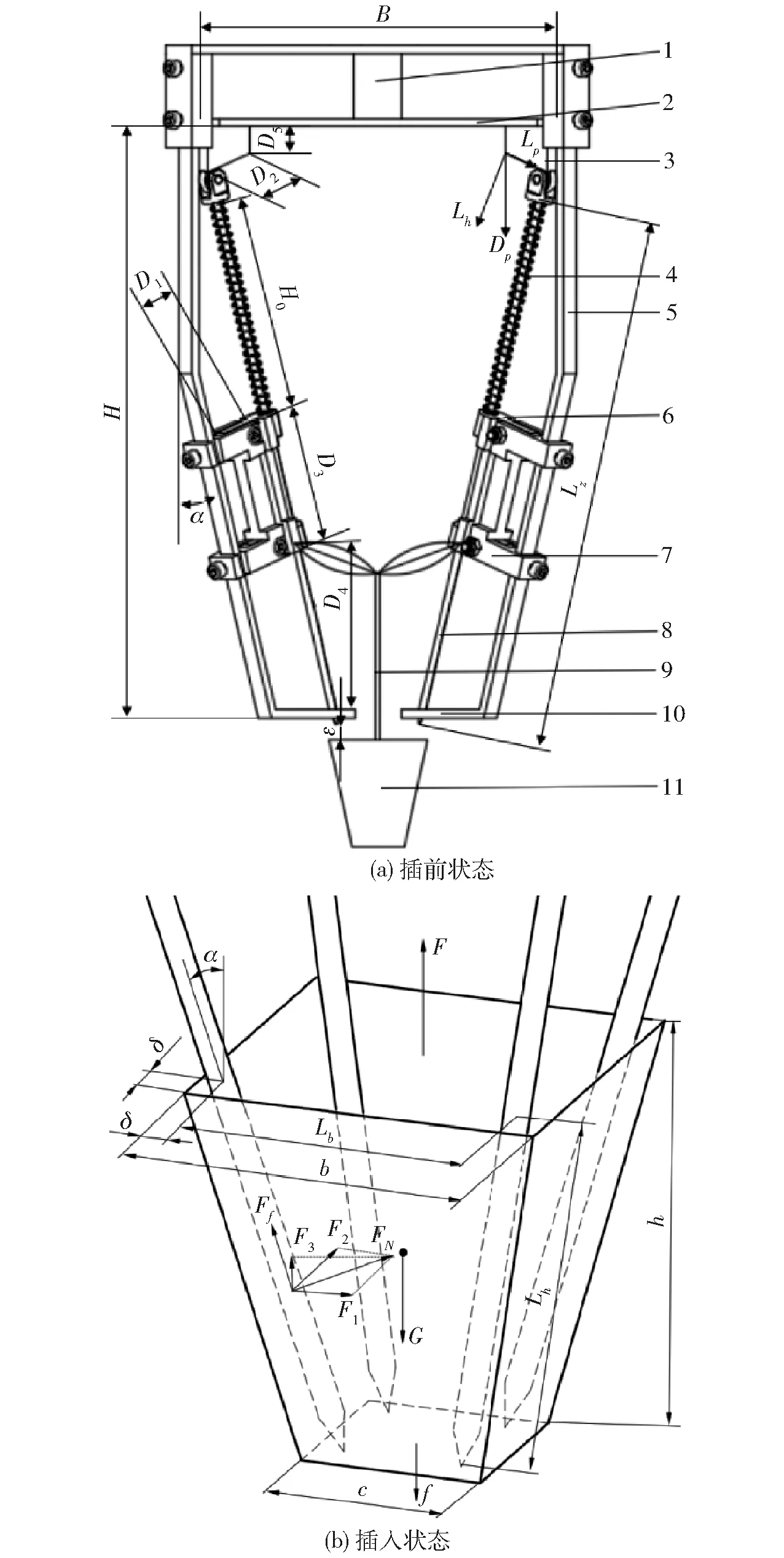
图3 取苗末端执行器结构简图Fig.3 Schematics of structure of end-effector1.伸缩杆 2.推板 3.滑轨 4.弹簧 5.安装架 6.针座 7.调节滑块 8.取苗针 9.甘蓝幼苗 10.挡苗板 11.钵体
(1)取苗针插入倾角α
取苗针从根钵四角插入,其在穴孔底面的投影与下口径边线的夹角呈45°,为避免插入倾角过小而刺到孔壁,应使α略大于穴孔4条棱线的倾角,即
(1)
式中b——穴孔上口径边长
c——穴孔下口径边长
h——穴孔高度
经测量72穴、128穴和200穴3种规格穴盘穴孔棱线的倾角均约17.5°,故本文对取苗针插入倾角取18°。
(2)取苗针入土长度Lh
取苗针入土长度取决于伸缩杆伸出长度,即
(2)
其几何约束条件为
(3)
式中Dp——伸缩杆伸出长度
ε——取苗针入土之前针尖与穴盘表面的初始距离,取10 mm
(3)伸缩杆行程[Dp]
伸缩杆的行程需满足取苗针在作业过程中的最大伸缩长度,即
(4)
其中穴孔高度h为最大穴盘规格72穴盘尺寸,取45 mm。故伸缩杆行程取100 mm。
(4)调节滑块卡槽长度D1
卡槽长度决定了取苗针间距调节范围,需同时满足3种规格穴盘的穴孔尺寸与插入边距。
(5)
式中δ——取苗针插入点到穴孔上边线的距离
Δb——不同穴盘规格之间最大与最小上口径边长之差,为15 mm
η——安装架沿垂直方向调节安装位置时所造成沿卡槽方向位置变化的极限误差
(5)滑轨长度D2
伸缩杆下压位移通过转向轴承可分解为沿滑轨方向位移和沿取苗针方向位移,故
Lp=Dpsinα
(6)
D2≥Lp+D1+η
(7)
式中Lp——实际取苗过程中转向轴承沿滑轨运动位移
(6)取苗针长度Lz
取苗针长度需同时满足弹簧自由长度、针座长度、针座到挡苗板的长度与取苗针入土长度,即
(8)
为了减轻调节滑块与针座对甘蓝幼苗茎叶的碰撞损伤,针座与挡苗板之间的垂直高度应高于甘蓝幼苗茎叶,即
D4≥Zh-ε
(9)
式中H0——弹簧自由长度,取140 mm
D3——针座长度
D4——针座与挡苗板之间的垂直高度
Zh——甘蓝钵苗株高
(7)取苗末端执行器内部空间高度H
内部空间高度H取决于取苗针的安放高度、伸缩杆实际工作长度以及甘蓝钵苗株高,即
H=Lzcosα+D2sinα+D5
(10)
式中D5——滑轨末端高度
(8)推板宽度B
推板的宽度决定了取苗末端执行器内部空间的大小,需同时满足取苗针、调节滑块及针座的正常工作需求和取苗作业空间要求,故
B=Lb+2Lzsinαcos45°+εtanαcos45°
(11)
式中Lb——取苗针入土宽度
为了解取苗针对甘蓝钵苗取苗时的受力情况,对钵苗刚要脱离穴盘的瞬间进行受力分析,如图3b所示。G为根钵自身重力,FN为根钵对单根取苗针的正压力,FN在空间上产生3个方向分力,其中2个水平方向分力为F1和F2,1个垂直方向分力为F3,F1和F2分别作用于相邻取苗针之间,将根钵向中心挤压,F3将根钵向上提升。Ff为取苗针与根钵之间的摩擦力,主要是由根钵与取苗针在提取瞬间的相对滑移趋势所引起的,其大小由根钵与取苗针之间的粘附力和摩擦因数所决定,由于根钵与取苗针实际接触受力面积很小,可以忽略不计[14]。F为取苗针对根钵产生的瞬间冲击合力,由钵苗的质量与取苗加速度所决定。f为穴孔壁对根钵的粘附力,其通常受穴盘与基质材料、接触面积、根钵含水率等因素影响[16]。当取苗针插入点到穴孔上边线的距离δ较大时,4根取苗针包裹下的受力基质区域的体积较小,应力集中较大。
3 试验材料与分析
在育苗过程中不同的穴盘规格与苗龄对甘蓝幼苗的生长和生理状况有很大的影响[5],进而影响取苗效果。本文所用甘蓝品种为京丰一号,3种育苗穴盘分别为72穴、128穴、200穴,穴盘外形尺寸均为540 mm×280 mm,穴孔横截面呈正方形,尺寸如表1所示。育苗选用无土栽培育苗基质,主要成分为草炭、蛭石、珍珠岩、腐熟中药渣、腐熟蘑菇渣、酒渣等,其中草炭、蛭石、珍珠岩的配比为6∶3∶1,N、P、K总质量比大于等于12 g/kg,有机质质量分数大于等于40%,硅质量比大于等于0.3 g/kg。

表1 3种穴盘规格穴孔尺寸Tab.1 Hole size of three types of plugs
为观察甘蓝种苗的大苗、中苗、小苗的几何参数,分别用72穴、128穴、200穴塑料穴盘进行育苗,并在苗龄20、30、40 d时分别抽取3盘随机取样研究,甘蓝穴盘育苗如图4a所示。根钵是一种根系-基质结合体,钵苗的根系对钵体有聚拢作用,其覆盖程度对取苗效果有较大影响[13,16],本文通过根钵侧面根系覆盖面积与侧面总面积的比值计算根系覆盖率[13],覆盖率超过80%以上定义为根钵形成,如图4b所示。
如图5所示,各个穴盘规格的幼苗随着苗龄的增长,株高、茎粗均增大,根钵也是逐渐形成。对于20 d小苗,200穴盘幼苗与其他穴盘幼苗相比,株高相差不大,茎粗较小,形成根钵;对于30 d中苗,128穴盘与200穴盘幼苗均形成根钵,在株高与茎粗上差异不大,但与72穴盘幼苗差异较大;对于40 d大苗,各穴盘幼苗均已形成根钵,72穴盘幼苗在株高与茎粗上远大于其他穴盘幼苗。由此可知,穴孔规格对幼苗生长有明显的限制作用,对根钵的形成程度也有很大的影响,大穴孔小苗龄不易形成根钵,小穴孔大苗龄根钵形成较好,但易出现盘外盘根现象而影响取苗效果[18],且株高、茎粗较小。综上,本文选用试验用苗为72穴盘幼苗,苗龄40 d;128穴盘幼苗,苗龄30 d;200穴盘幼苗,苗龄20 d,在均已形成根钵的前提下进行取苗试验研究。

图4 甘蓝钵苗Fig.4 Cabbage seedlings

图5 甘蓝幼苗生长趋势Fig.5 Growth trend of cabbage seedlings
4 试验指标与因素的确定
4.1 试验指标
甘蓝钵苗取苗试验从根钵完整率和取苗失败率两方面考察取苗效果[16,19]。
取苗针在提取出甘蓝根钵的过程中,会出现部分基质从根钵上脱落现象,脱落质量过多对甘蓝钵苗栽植效果和栽植成活率均有较大影响[16],结合前期试验和参考文献[20],根钵完整率小于50%时就会严重降低钵苗栽植的直立度与栽植成活率。故将从穴盘中取出的甘蓝钵苗的根钵完整率小于50%视为取苗失败。其计算公式为
(12)
式中Rs——根钵完整率,%
mr——取出根钵的质量,g
md——遗留和脱落的根钵质量,g
取苗结束后,剪去甘蓝幼苗,把遗留在穴孔和脱落在外的根钵收集后使用JD1000-2型电子天平进行称量。
取苗针在提取出甘蓝钵苗的过程中,将钵苗未被取出、中途掉落以及取出后的钵苗根钵完整率小于50%均视为取苗失败,取苗失败率Sf计算公式为
(13)
式中Ynf——钵苗未取出、中途掉落和根钵完整率小于50%的钵苗数量,个
Yni——主茎折断数,个
Ynt——取苗穴孔总数,个
Ynh——空穴数,个
对于甘蓝钵苗来说,苗叶的损伤或者单个苗叶折断脱落对于甘蓝的生长发育不会有明显的影响,而主茎的折断代表着甘蓝生长发育的停止[19],因此把主茎折断数Yni作为取苗失败的一个统计量。空穴数Ynh是指穴盘中未生长甘蓝幼苗的穴孔数量,其与育苗过程中出苗率相关,与末端执行器作业性能无关,不作为取苗失败的统计量。
4.2 试验因素
4.2.1取苗加速度
在取苗过程中,从根钵的力学角度进行考虑,根据牛顿第二定律取苗针对根钵的冲击合力F为
F=ma
(14)
式中m——钵苗的质量,g
a——取苗加速度,m/s2
由钵苗取苗瞬间受力分析可知,在取苗针的带动下,根钵刚要脱离穴孔的瞬间将会产生瞬时加速度,当钵苗的质量不变时,瞬时加速度越大,取苗针对根钵的冲击力也就越大。
4.2.2穴盘规格
不同规格穴盘的甘蓝钵苗的质量不同,体积不同,由受力分析可知根钵与穴孔接触面积不同,则根钵与穴孔之间的粘附力不同。当取苗加速度一定时,因钵苗的质量不同,所受冲击合力F也有所不同。甘蓝根系呈放射状分布,对基质块具有聚拢作用,越靠近根源根系越密集,越向外放射根系密度越小,即穴盘规格不同的根钵根系分布密度不同,对基质的聚拢效果也不一样。选用穴盘3个水平为72穴、128穴、200穴。
4.2.3根钵含水率
水是基质颗粒之间、根系与基质颗粒之间的一种介质,使根钵的内部产生一种粘结力,同时含水率对根钵与穴孔壁之间粘附力有影响[16]。由于根钵含水率是通过鼓风干燥箱将根钵干燥后进行测试,不能即时所得,于是采用先试验后测试的方法,提前把根钵浇透,然后控制间隔时间进行取苗试验,取苗后剪去甘蓝幼苗,只留根钵以干湿质量法进行测量,计算公式为
(15)
式中θm——根钵含水率,%
m1——干燥前根钵质量,g
m2——干燥后根钵质量,g
以实际测量为准,对每种穴盘的钵苗分别测定根钵含水率取平均值,选取3个平均含水率水平为42.3%、56.2%、69.1%。
4.2.4插入边距比λb
插入边距比λb为插入点到穴孔上边线的距离δ与穴孔上口径边长b的百分比,即
(16)
由图3可知,为适应3种常用甘蓝穴盘取苗需要,取苗针入土宽度设计成可调,即插入边距δ可调节。而δ过大,4根取苗针所包裹的受力范围内的基质体积过小,应力集中过大,且插入区域靠近根系密集区和甘蓝幼苗茎叶区,易造成幼苗损伤;δ过小,取苗针离根钵边缘太近,易破坏根钵边缘区域,造成基质脱落,并且易发生取苗针与根钵的错位。
5 离散元模拟仿真
5.1 穴孔仿真模型
采用72穴、128穴、200穴盘尺寸数据,利用SolidWorks 2016对穴孔进行建模,并导入EDEM 2.7软件内,创建模块的几何体(Geometry),如图6所示,仿真参数如表2所示。

图6 穴孔3D模型Fig.6 3D model of hole1.穴钵 2.取苗针 3.挡苗板

参数材料穴盘基质取苗针泊松比0.380.40.3剪切模量/MPa8661075800密度/(kg·m-3)14007507910
5.2 钵体颗粒模型
为方便模拟和减少计算量,钵体基质颗粒模型为球形,半径为0.4~0.7 mm,根据不同的穴盘规格设置相适应的Total Mass,由Factory生成钵体颗粒并使其在重力作用下达到稳定后,对模型进行压缩,最终得到钵体颗粒模型如图7所示。

图7 钵体仿真模型Fig.7 Simulation model of bowl
在取苗过程中,会产生基质部分脱落的现象,影响取苗效果。实际上是在取苗针的作用下基质颗粒间的粘结产生破裂,发生相对位移,造成颗粒下落。而接触模型Hertz-Mindlin with bonding用于模拟破碎、断裂等问题,采用小颗粒粘结成大块物料,外力作用下颗粒间粘结力会发生破坏,从而产生破碎及断裂效果[21]。
5.3 钵体模型提取仿真试验
为了分析加速度、穴盘规格、边距比对基质颗粒脱落的影响,利用EDEM求解器对建立的钵体模型进行提取仿真,在基质颗粒生成、压缩后,使颗粒间产生粘结,并使取苗针以固定角度插入钵体模型中,且对取苗针施加向上的加速度,完成对钵体的提取,如图8所示。在提取过程中伴随着颗粒的脱落,为了计算钵体模型的完整率,利用EDEM后处理模块中Grid Bin Group对脱落在穴孔内的颗粒进行质量统计,即
(17)
式中Rm——钵体模型完整率,%
mt——颗粒模型总质量,g
ml——脱落颗粒质量,g

图9 各种试验条件下的仿真试验结果Fig.9 Simulation experiment results under various conditions
对穴盘规格128穴,插入边距比15%,加速度0.1、0.3、0.5、0.7、0.9 m/s2进行仿真模拟,试验结果如图9a所示,加速度0.1、0.3 m/s2模型完整率差异不大,但随着加速度的逐渐增大,模型完整率迅速减小,最优加速度范围为0.1~0.5 m/s2。

图8 模拟仿真试验Fig.8 Simulation experiment
对加速度0.3 m/s2,插入边距比15%,穴盘规格72、128、200穴进行仿真模拟,试验结果如图9b所示,模型完整率优选顺序为128、72、200穴,128穴最优,但总体水平差异不大。
对加速度0.3 m/s2,穴盘规格128穴,插入边距比5%、10%、15%、20%、25%进行仿真模拟,试验结果如图9c所示,随着插入边距比的增加,模型完整率先增大后减小,在边距比15%时达到最高,最优水平范围为10%~20%。
6 试验设计与结果分析
6.1 正交试验设计
取苗试验在东北农业大学农机实验室内进行,设计取苗试验装置如图10所示,把取苗末端执行器挂接于丝杠滑台安装架上进行取苗试验,有效行程800 mm,通过外接电机控制器对作业位移和速度进行控制,以满足对取苗加速度因素水平要求。
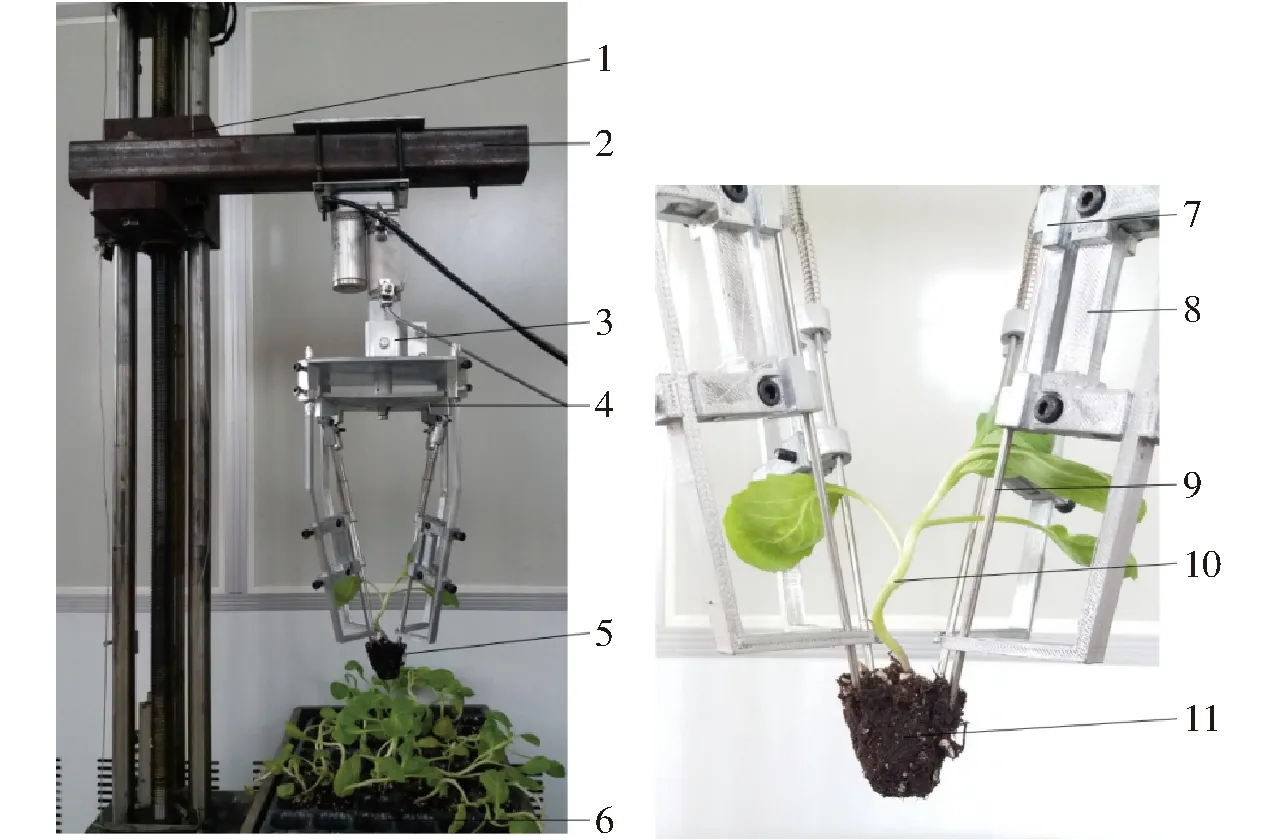
图10 甘蓝钵苗取苗末端执行器试验装置Fig.10 Experiment device of end-effector picking up cabbage seedlings1.丝杠滑台 2.安装架 3.卡箍 4.取苗末端执行器 5.钵苗 6.穴盘 7.针座 8.调节滑块 9.取苗针 10.甘蓝主茎 11.甘蓝根钵
针对取苗效果,结合仿真分析结果,影响因素穴盘规格取72穴、128穴、200穴,加速度a取0.1、0.3、0.5 m/s2,取苗针插入边距比λb取10%、15%、20%,根钵含水率取42.3%、56.2%、69.1%。试验采用L9(34)正交表,对每个试验组合取40株甘蓝钵苗,试验重复3次,计算其平均值作为每组试验的数据,因素水平依次为A、B、C、D,试验因素水平如表3所示。
6.2 试验结果与分析
6.2.1试验因素对试验指标的影响
正交试验结果与极差分析如表4所示。
通过对试验结果极差分析,得到影响根钵完整率的主次顺序为B、C、D、A,各因素的最优水平分别为A1、B1、C2、D2,则最优组合为A1B1C2D2。同理,影响取苗失败率因素的主次顺序为A、B、D、C,各因素的最优水平分别为A2、B1、C1、D2,则最优组合为A2B1C1D2。
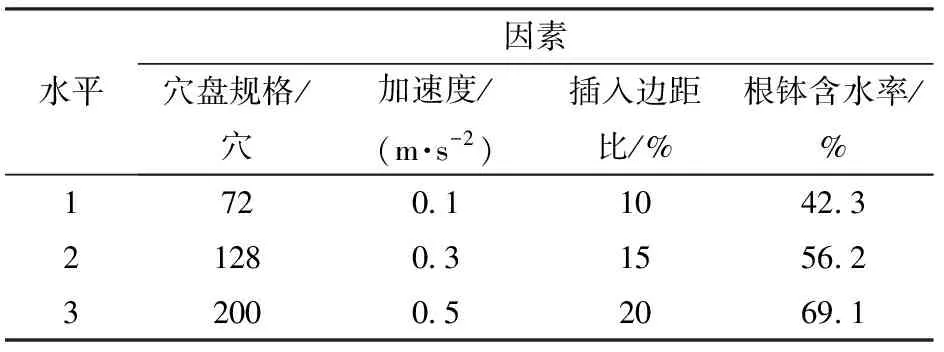
表3 正交试验因素水平Tab.3 Orthogonal experiment factors and levels
通过方差分析,对各因素影响根钵完整率和取苗失败率进行显著性检验,结果如表5和表6所示。
注:** 代表极为显著,*代表显著,ns代表不显著,下同。

表6 取苗失败率方差分析Tab.6 Variance analysis of seedling failure rate
由表5、6可知,取苗加速度对根钵完整率和取苗失败率影响均极为显著;根钵含水率对根钵完整率影响极为显著,而对取苗失败率影响显著;穴盘规格对根钵完整率影响不显著,而对取苗失败率影响极为显著;取苗针插入边距比对根钵完整率影响极为显著,而对取苗失败率影响不显著,这与极差分析的主次因素结论一致。因此,对于根钵完整率和取苗失败率而言,取苗加速度和根钵含水率的选择至关重要。
6.2.2最优组合确定与验证
根据取苗末端执行器作业性能要求,各试验指标的优水平组合各不相同,为了兼顾平衡各项指标,采用综合加权评分法进行分析,尽可能选出令各项指标都能达到最优的组合[22]。考虑到4个因素对参数指标影响的重要程度,以100分作为总权重,根钵完整率与取苗失败率各为50分,试验的综合加权结果如表7所示。
通过表7分析得出各试验因素对试验指标(根钵完整率、取苗失败率)影响的最优组合,各因素主次顺序为B、D、A、C,各因素最佳水平组合为B1D2A2C2,即取苗加速度为0.1 m/s2,根钵含水率为56.2%,穴盘规格为128穴,插入边距比为15%。采用最优组合,对取苗末端执行器进行验证试验,根钵完整率为97.93%,取苗失败率为0.81%,且试验验证结果与正交试验结果对比,取苗末端执行器的作业性能最优。并以末端执行器取苗放苗为一个工作流程,对取苗效率进行测试,测试结果为12株/min。

表7 综合加权结果Tab.7 Result of integrated weight
6.3 机构优化
通过试验发现,在末端执行器针对200穴规格钵苗取苗过程中,由于穴孔较小,位于安装架下部的挡苗板结构偏大,出现相邻甘蓝钵苗受压受损情况。为满足对多规格穴盘的适应性,避免挡苗板损伤幼苗,对机构进行优化设计,把安装架易对相邻钵苗碰撞区域进行折弯处理,以减少对作业空间的占用,优化结果如图11所示。
7 结论
(1)针对甘蓝钵苗的生理特性和3种常用穴盘结构,设计了一种可调节式四针取苗末端执行器,适用于72穴、128穴、200穴3种规格穴盘,通过调整安装架、调节滑块、针座的位置,可实现取苗针插入根钵边距的调节,以适应3种规格穴盘的取苗需要。
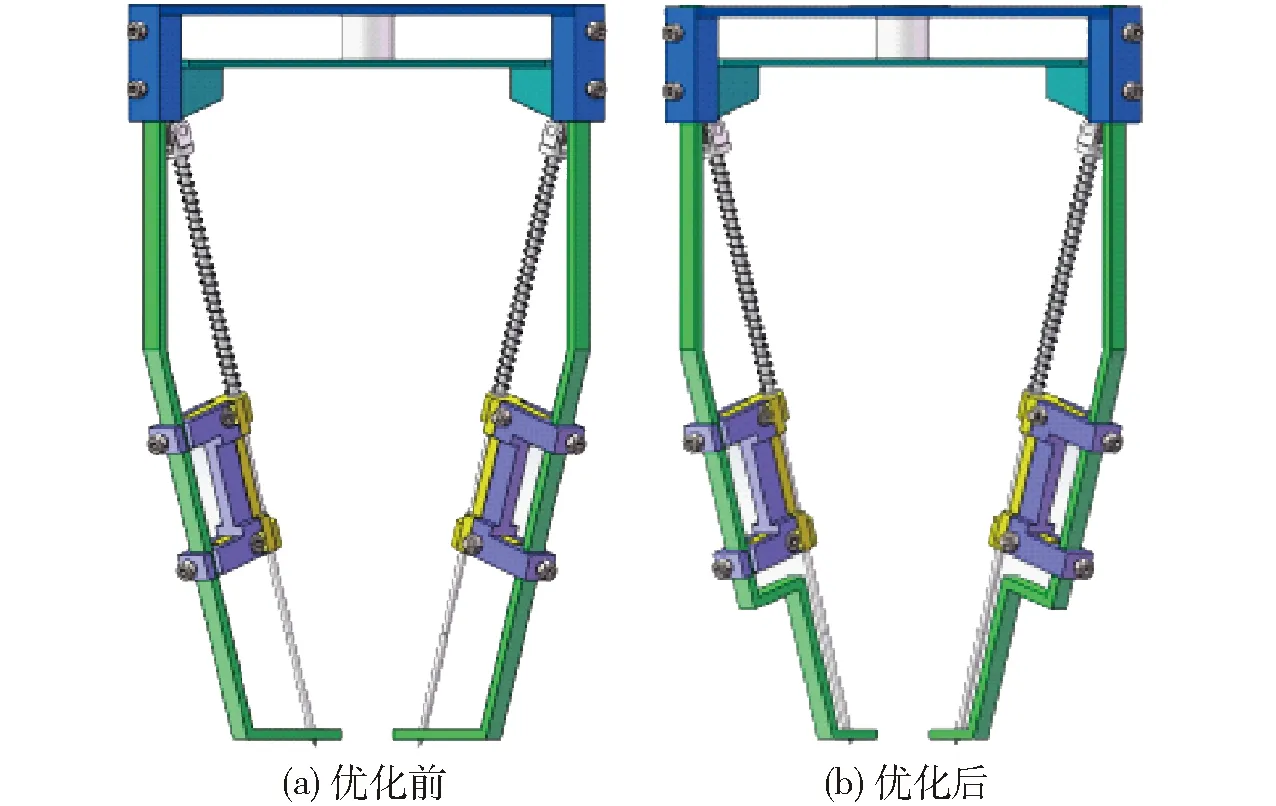
图11 机构优化Fig.11 Mechanism optimization
(2)在甘蓝钵苗根钵均形成的前提下,利用装置的可调节性提取相关试验因素,并运用EDEM对钵体提取进行单因素仿真模拟。采用L9(34)正交表进行取苗试验,通过极差分析、方差分析和综合加权法得到影响取苗效果因素的主次顺序为:取苗加速度、根钵含水率、穴盘规格、插入边距比;最优组合:取苗加速度为0.1 m/s2,根钵含水率为56.2%,穴盘规格为128穴,插入边距比为15%,此时根钵完整率为97.93%,取苗失败率为0.81%。
