设施农业多排布太阳能智能追踪系统设计
2019-11-12陈昕楠庞力豪程玉峰闫家铭邵蕾
陈昕楠 庞力豪 程玉峰 闫家铭 邵蕾
摘要:为进一步提高农业设施中太阳能电池板的能量转换效率,提升能量储存速率,设计了一种智能型多排布太阳能追踪系统。该系统主要由控制系统、太阳能电池板组件、太阳能电池板水平及仰角方向调节结构等部分组成,实现了对太阳光线的智能追踪,使太阳能电池板始终垂直于光线方向。该系统驱动方便,整体结构简单,立体调整相互独立,结构装配相互融合,能更大限度地提高能量转换效率,可广泛应用于设施农业领域。
关键词:太阳能;设施农业;智能追踪;能源装备
中图分类号:TK513.4;S24 文献标识码:A
文章编号:0439-8114(2019)18-0133-04
DOI:10.14088/j.cnki.issn0439-8114.2019.18.032 开放科学(资源服务)标识码(OSID):
Design of multi-arrangement solar energy intelligent
tracking system for facility agriculture
CHEN Xin-nan,PANG Li-hao,CHENG Yu-feng,YAN Jia-ming,SHAO Lei
(Yantai Research Institute,China Agricultural University,Yantai 264670,Shandong,China)
Abstract: In order to further improve the energy conversion efficiency and energy storage rate of solar panels in facility agriculture, an intelligent multi-arrangement solar tracking system is designed in this paper. The system is mainly composed of control systems, solar panel modules, horizontal and elevation direction adjustment structure and other components. The system realizes the intelligent tracking of sunlight, so that the solar panels are always perpendicular to the direction of light. The system is effective to run and the whole structure is simple. The two regulatory structures for different directions are independent of each other. The system greatly improves energy conversion efficiency and can be widely used in the field of facility agriculture.
Key words: solar energy; facility agriculture; intelligent tracking; energy equipment
《“十三五”農业科技发展规划》中提出深入推进农业供给侧结构性改革,实施农村新能源行动[1]。随着太阳能产业的高速发展,太阳能技术广泛应用于现代农业。利用太阳能电池为设施农业生产提供能源动力,有效解决资源与环境问题,发展绿色生态农业。
太阳能电池是通过光电效应或者光化学效应直接把光能转化为电能的装置[2-6]。现有的太阳能电池板有两种放置方式:一种为直接固定在屋顶、温室或者运动体上,太阳能电池板不能随着光线的变化进行方向调节。该方式只能保证在正午左右吸收较多的太阳光,其他时刻效果不佳[7,8];另一种则是固定在可以进行水平方向旋转的结构上[9,10],可以根据光线的变化进行水平方向的自动调整。相对第一种方式,该方式的太阳能接收效果得到一定的改善,但由于只能进行水平面上的方向调整,效率仍无法实现最大化。为实现太阳能电池板追踪太阳光线的最佳效果,设计了一种多排布太阳能智能追踪系统,实现对太阳光线水平与竖直两个方向的独立追踪,提升了追踪的准确度,各追踪单体之间形成联动,进一步提高了能量转换效率和能量储存速度,降低了农业生产成本。
1 系统结构及工作原理
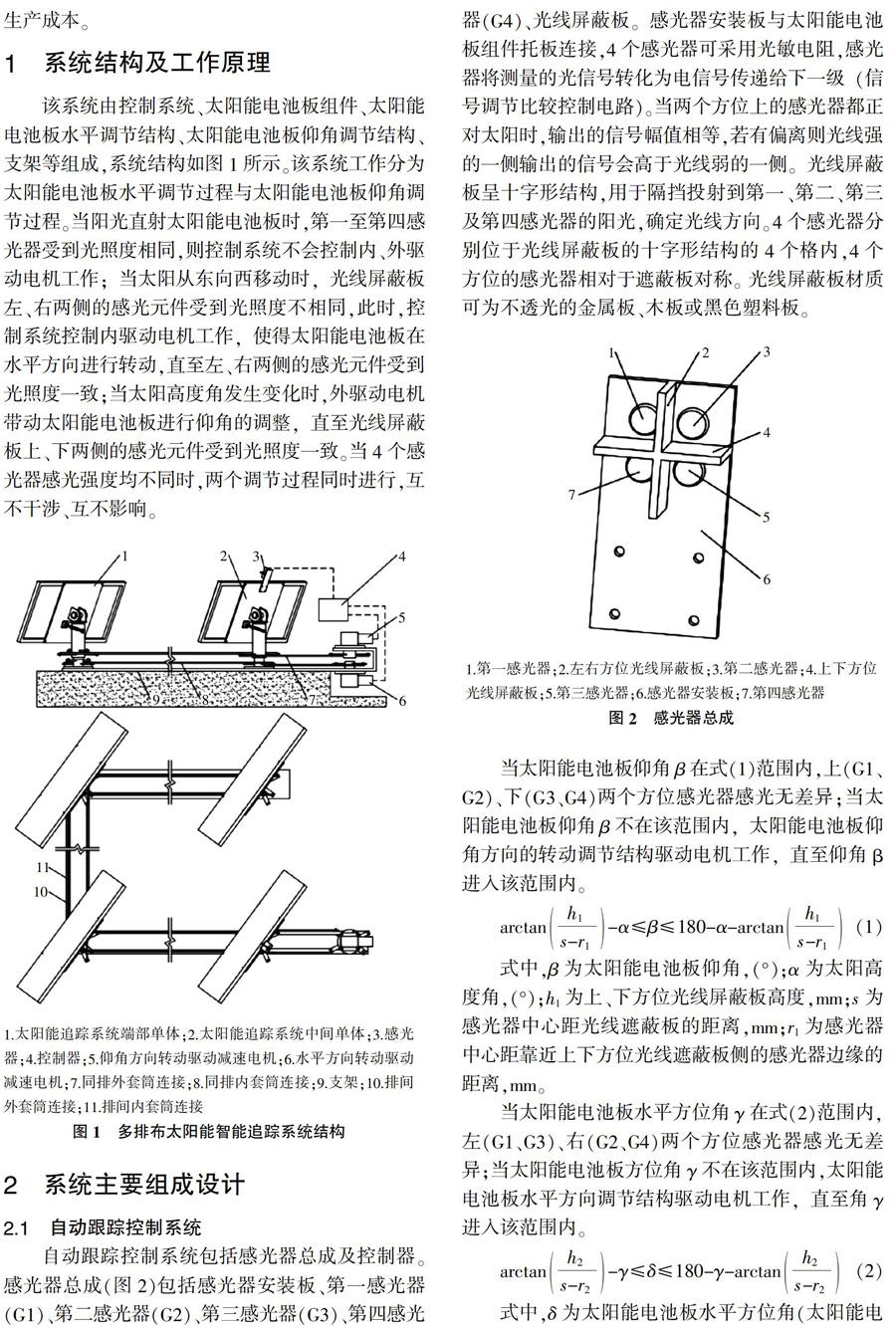
该系统由控制系统、太阳能电池板组件、太阳能电池板水平调节结构、太阳能电池板仰角调节结构、支架等组成,系统结构如图1所示。该系统工作分为太阳能电池板水平调节过程与太阳能电池板仰角调节过程。当阳光直射太阳能电池板时,第一至第四感光器受到光照度相同,则控制系统不会控制内、外驱动电机工作;当太阳从东向西移动时,光线屏蔽板左、右两侧的感光元件受到光照度不相同,此时,控制系统控制内驱动电机工作,使得太阳能电池板在水平方向进行转动,直至左、右两侧的感光元件受到光照度一致;当太阳高度角发生变化时,外驱动电机带动太阳能电池板进行仰角的调整,直至光线屏蔽板上、下两侧的感光元件受到光照度一致。当4个感光器感光强度均不同时,两个调节过程同时进行,互不干涉、互不影响。
2 系统主要组成设计
2.1 自动跟踪控制系统
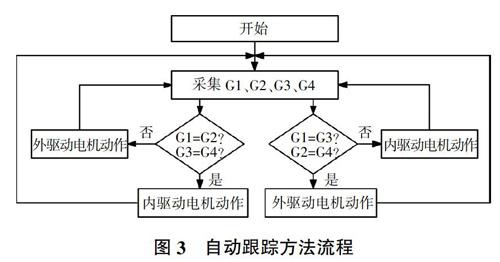
自动跟踪控制系统包括感光器总成及控制器。感光器总成(图2)包括感光器安装板、第一感光器(G1)、第二感光器(G2)、第三感光器(G3)、第四感光器(G4)、光线屏蔽板。感光器安装板与太阳能电池板组件托板连接,4个感光器可采用光敏电阻,感光器将测量的光信号转化为电信号传递给下一级(信号调节比较控制电路)。当两个方位上的感光器都正对太阳时,输出的信号幅值相等,若有偏离则光线强的一侧输出的信号会高于光线弱的一侧。光线屏蔽板呈十字形结构,用于隔挡投射到第一、第二、第三及第四感光器的阳光,确定光线方向。4个感光器分别位于光线屏蔽板的十字形结构的4个格内,4个方位的感光器相对于遮蔽板对称。光线屏蔽板材质可为不透光的金属板、木板或黑色塑料板。
当太阳能电池板仰角β在式(1)范围内,上(G1、G2)、下(G3、G4)两个方位感光器感光无差异;当太阳能电池板仰角β不在该范围内,太阳能电池板仰角方向的转动调节结构驱动电机工作,直至仰角β进入该范围内。
式中,β为太阳能电池板仰角,(°);α为太阳高度角,(°);h1为上、下方位光线屏蔽板高度,mm;s为感光器中心距光线遮蔽板的距离,mm;r1为感光器中心距靠近上下方位光线遮蔽板侧的感光器边缘的距离,mm。
当太阳能电池板水平方位角γ在式(2)范围内,左(G1、G3)、右(G2、G4)两个方位感光器感光无差异;当太阳能电池板方位角γ不在该范围内,太阳能电池板水平方向调节结构驱动电机工作,直至角γ进入该范围内。
式中,δ为太阳能电池板水平方位角(太阳能电池板与南向夹角),(°);γ为太阳方位角,(°);h2为左、右方位光线屏蔽板高度,mm;r2为感光器中心距靠近左右方位光线遮蔽板侧的感光器边缘的距离,mm。
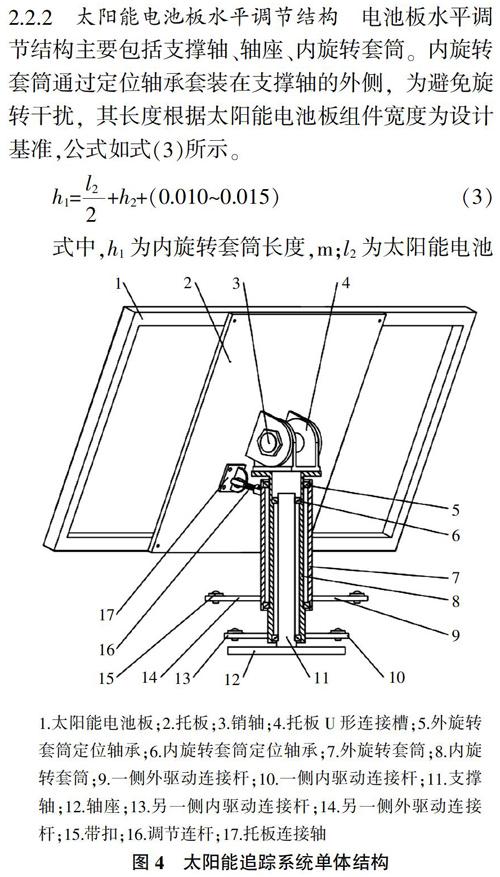
控制器接收并分析比较各感光器传递的感光强度,根据比较结果对驱动机构发出相应指令,使太阳能电池板根据太阳位置做出方向调整。控制系统自动跟踪方法流程如图3所示。
控制器包括信号调节比较控制电路模块、RS锁存器模块、电机控制输出电路模块。信号调节比较控制电路将感光器总成传输的电信号进行处理和比较,当两路光电信号相近或相同,输出全为低电平,当有一侧较强时,强的一侧输出高电平,传输给RS锁存器。RS锁存器对来自信号调节比较控制电路的信号进行锁存,输出控制电机正、反转的信号,并传输给电机功率控制输出电路。电机功率控制输出电路用于控制电机正转、反转,停止受控于RS锁存器。
2.2 太陽能追踪系统单体
太阳能追踪系统由若干结构完全相同的单体构成,单体多排列分布。单体核心结构包括太阳能电池板组件、太阳能电池板水平调节结构、太阳能电池板仰角调节结构(图4)。
2.2.1 太阳能电池板组件 太阳能电池板组件包括太阳能电池板、托板。太阳能电池板安装于托板上。托板背面设置两个连接结构,一个是位于托板中心的U形连接槽,槽宽度40 mm、连接孔直径20 mm,用于连接太阳能电池板水平调节结构;一个是位于托板中心稍偏下方位置的连接轴,直径20 mm,用于连接太阳能电池板仰角调节结构。
2.2.2 太阳能电池板水平调节结构 电池板水平调节结构主要包括支撑轴、轴座、内旋转套筒。内旋转套筒通过定位轴承套装在支撑轴的外侧,为避免旋转干扰,其长度根据太阳能电池板组件宽度为设计基准,公式如式(3)所示。
式中,h1为内旋转套筒长度,m;l2为太阳能电池板组件宽度,m;h2为排间外驱动连接件上的带扣最高位置距离地面高度,m。
2.2.3 太阳能电池板仰角调节结构 电池板仰角调节结构包括外旋转套筒及调节连杆。外旋转套筒通过轴承套装在内旋转套筒的外侧,距离上方50 mm处设置连接轴。因排内外驱动连杆位于排间内驱动连杆下方,外旋转套筒长度为在太阳能电池板组件宽度1/2基础上增加30~40 mm。调节连杆的一端与太阳能电池板托板中心偏下方的U形连接槽铰接,另一端与外旋转套筒的连接轴铰接。
2.3 单体的整体连接
2.3.1 整体系统水平方向统一转动结构 各太阳能追踪系统单体的内旋转套筒下方10 mm处焊接两个对称的内驱动连接件。内驱动连接件为5 mm厚钢板制成,当太阳能电池板在同一位置时,各排的内驱动连接件所处方向相同。同一排两侧的内驱动连接件分别用钢丝绳通过带扣依次连接,相邻内驱动连接件连接长度相同,使同一排太阳能电池板形成联动,实现同一排的水平方向统一转动。
在每一排端部的内旋转套筒上,除同排的内驱动连接件外,还设置有多排连接联动内驱动连接件,与同排内驱动连接件垂直,位于其上方10 mm。多排内驱动连接件在同一时刻所处位置相对于太阳能电池板一致,利用两条钢丝绳分别将多排内驱动连接件两侧通过带扣连接,实现多排水平方向的统一转动。
内驱动减速电机的输出轴上装配内驱动固定件,与同排内驱动连接件位于同一高度,内驱动固定件两侧分别连接水平旋转联动结构的任意一排的端部或者中间的内驱动连接件的两侧。整体系统水平方向统一转动结构如图5所示。
2.3.2 整体系统仰角方向统一转动结构 太阳能追踪系统单体的外旋转套筒下方10 mm处焊接两个对称的外驱动连接件。外驱动连接件为5 mm厚钢板制成,安装时的位置、方向和连接方式与内驱动连接件相同,实现同一排的仰角方向统一转动。
在每一排端部的外旋转套筒上,除同排的外驱动连接件外,也设置有多排连接联动外驱动连接件,与同排外驱动连接件垂直,位于其上方10 mm。安装时位置、方向和连接方式与内驱动连接件相同,实现多排的统一仰角方向转动。
外驱动减速电机输出轴装配外驱动固定件,外驱动固定件两侧分别连接仰角旋转联动结构的任意一排的端部或者中间的外驱动连接件的两侧,安装高度与同排外驱动连接件高度相同。整体系统仰角方向统一转动结构如图6所示。
2.4 配置动力
整体系统水平方向统一转动结构与整体系统仰角方向统一转动结构分别采用一套独立的水平转动驱动减速电机、仰角转动驱动减速电机驱动。驱动电机均固定在U形安装基板上,安装基板固定在支架上,如图1所示。由于跟踪过程阳光方向变化缓慢,将动力驱动转动简化为低匀速转动,根据驱动太阳能电池板转动数量与质量,驱动电机功率由式(4)、式(5)确定。
式中,P1为内驱动减速电机功率,kW;k为太阳能组件数量,个;n1为内旋转套筒转动速度,r/min;μ为圆锥滚子轴承摩擦系数,μ=0.001 7~0.002 5[11];m1为内旋转套筒、内驱动连接件、太阳能电池板组件质量,kg;R1为内驱动连接件的带扣到支撑轴的距离,m。
式中,P2为外驱动减速电机功率,kW;n2为外旋转套筒转动速度,r/min;m2为太阳能电池板组件质量,kg;R2为太阳能电池板中心到支撑轴轴线的距离,m。
3 结论
太阳能技术的研发与利用已进入蓬勃发展时期,太阳能资源与设施农业生产的有机结合既可以节约生产成本,又符合国家所倡导的绿色、节能、环保的总体要求。为进一步提高太阳能电池板的工作效率,综合考虑了现有太阳能追踪系统的优缺点,设计了一种更加智能和高效的多排布太阳能追踪系统。该系统通过传感器监测太阳光线强弱以判断太阳的移动方向,通过水平转动角度和仰角大小的自动调节使太阳能电池板始终垂直于光线。两个方向的调节机构在安装上相互融合,在工作上彼此独立,互不影响,实现了对太阳光线精确追踪,减少了能量损失。整个系统驱动方便,结构简单,多排之间形成联动,降低了生产成本。该系统还具有能量转换效率高、能量储存速度快、生产成本低等特点,可与多种农业设施相结合,为其在温室栽培、畜牧场养殖等领域的广泛使用奠定了基础。
参考文献:
[1] 中华人民共和国农业农村部.农业部关于印发《“十三五”农业科技发展规划》的通知[EB/OL].http://www.moa.gov.cn/xw/bmdt/201703/t20170310_5514395.htm.2017-03-10.
[2] 梁文跃,钟锦耀,徐海涛,等.利用叠层一维光子晶体调控半透明有机太阳能电池的性能[J].光子学报,2018,47(8):139-146.
[3] PUSHPENDRA K S R,DURG S C,RUDRA P S. Decentralized solar rooftop photovoltaic in India:On the path of sustainable energy security[J].Renewable energy,2019,131:297-307.
[4] LI F L,CHANG Z,LI X C,et al. Energy and exergy analyses of a solar-driven ejector-cascade heat pump cycle[J].Energy,2018,165:419-431.
[5] MOHAMMAD A,MOHAMMAD M. Thermodynamic,thermoeconomic
and life cycle assessment of a novel integrated solar combined cycle(ISCC) power plant[J].Sustainable energy technologies and assessments,2018,27:192-205.
[6] JOSEPH H M. Community-scale assessment of rooftop-mounted solar energy potential with meteorological,atlas,and GIS data:A case study of Guelph,Ontario(Canada)[J].Energy,sustainability and society,2012,2(1):1-19.
[7] 林 源.薄膜太陽能电池的研究与应用进展[J].化工新型材料,2018,46(6):57-60.
[8] 刘 军,崔学伟.基于单片机的双模式太阳能充电器的设计[J].电子测量技术,2018,41(18):91-96.
[9] 闫孝姮,吴 琨,王改华.双跟踪模式的智能太阳能追踪系统设计[J].电源技术,2015,39(10):2166-2168.
[10] 杨清学.基于PIC18F4520的太阳能追踪系统设计与实现[J].电子设计工程,2016,24(20):137-139.
[11] 成大先.机械设计手册[M].第五版.北京:化学工业出版社,2008.
