波浪运动补偿稳定平台运动学分析
2019-11-11王旺球
王旺球
(中国船舶重工集团公司第七一三研究所,郑州 450000)
关键字:运动补偿;空间坐标转换;运动学仿真
0 引言
波浪运动补偿稳定平台是一种水面多功能平台,可用作起降平台、海上维修人员转运、海上稳定科研平台等,具有广阔的应用前景。承载波浪运动补偿稳定平台的母船受风浪影响会产生摇摆,形成六个自由度的运动:进退、升沉、横漂、偏转、纵摇和横摇。进退、偏转和横漂可以通过母船的操纵系统进行控制,而升沉、纵摇和横摇运动很大程度上取决于海况和母船结构参数。由于海况复杂且不可控制,稳定平台为提供相对地球绝对平稳的工作环境,必须对母船引起的海上摇摆运动进行补偿,即利用自身运动补偿母船升沉、纵摇和横摇运动造成的位置改变[1]。
1 母船尺寸及摇摆参数
1.1 母船尺寸
母船尺寸如图1所示,设定母船总长45 000 mm,总宽8 000 mm,甲板距离摇摆中心垂直距离2 400 mm。波浪运动补偿稳定平台位于船尾部,波浪运动补偿稳定平台中心即导引点距离母船摇摆中心水平距离18 000 mm,垂直距离2 400 mm。波浪运动补偿稳定平台与甲板的垂直距离为500 mm,平台驱动装置置于甲板下方。
1.2 摇摆参数
假设母船在航行过程中纵摇幅度不大于2°,纵摇周期10 s;横摇幅度不大于3.6°,横摇周期10 s。
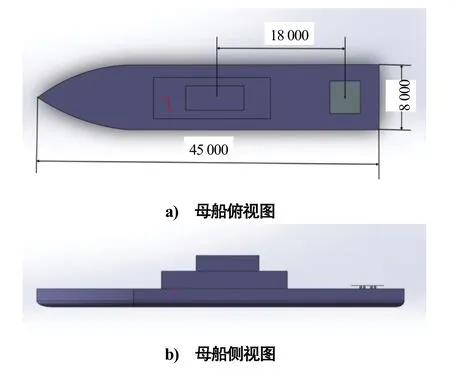
图1 母船尺寸(单位:mm)
2 波浪运动补偿稳定平台运动学计算
要实现对母船升沉、纵摇和横摇的补偿,可利用母船坐标和大地坐标之间的转化矩阵来确定母船实时姿态变化,从而求出母船上工作位置的空间位置变化,最后采取措施对这些位置变化进行补偿。由于升沉运动只是在垂直方向上的平移运动,只对单一方向产生影响,补偿计算较为简单,故本文只计算母船纵摇和横摇的影响。
2.1 坐标系建立
建立大地坐标系和母船坐标系2个坐标系。大地坐标系O-XYZ原点设在母船质量中心在地表的投影点,X轴和Z轴在地表切面内,分别水平指北、水平指东,Y轴垂直于地表切面向上,大地坐标系如图2所示。地理坐标不仅随地球自转相对惯性坐标系运动,还随着母船运动相对惯性坐标系运动。母船坐标系O1-X1Y1Z1原点位于运载体质量中心在地表的投影点,X1轴与母船纵向重合指向船首,Y1轴垂直于甲板向上,Z1轴与母船横轴重合指向右舷。
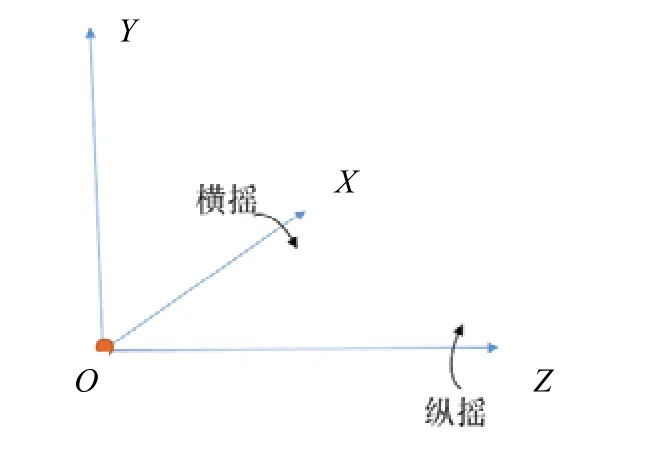
图2 大地坐标系
2.2 坐标转换矩阵
要求母船上波浪运动补偿稳定平台工作位置的变换,必须先求解母船坐标系相对于大地坐标系的转换矩阵。母船坐标系到大地坐标系的转换是大地坐标系到母船坐标系转换的逆过程,根据母船平台罗经测量母船姿态的原理可知,由大地坐标系到母船坐标系转换必须按照横摇-纵摇的转换顺序进行。因此,由母船坐标系到大地坐标系的坐标转换必须按照纵摇-横摇的转换顺序进行,即先进行纵摇转变,再进行横摇转变[2-3]。
设母船纵摇角度为γ、横摇角度为θ,则母船坐标系到地理坐标系的纵摇转换矩阵Ti、横摇转换矩阵Tp分别为
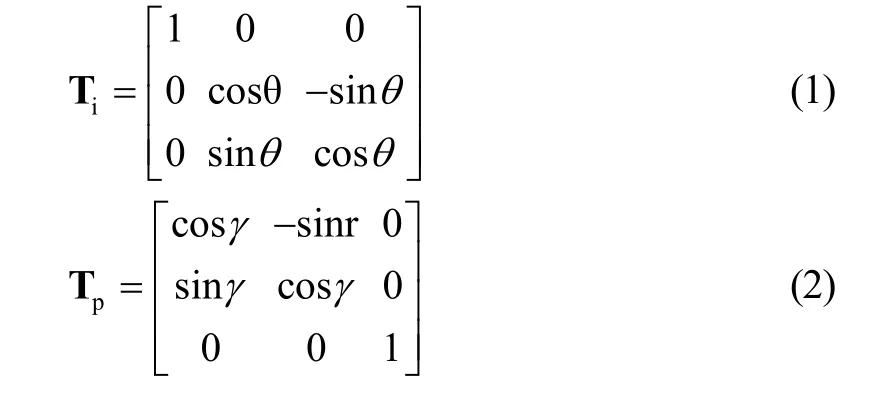
由公式(1)、公式(2)得坐标转换矩阵
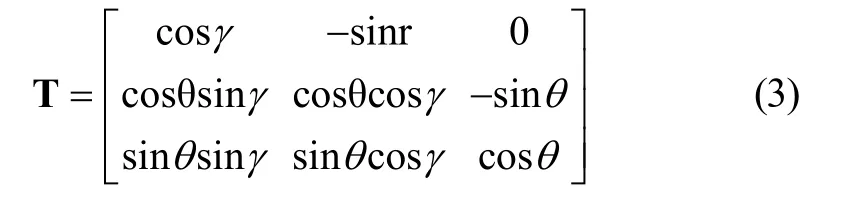
2.3 母船波浪运动补偿稳定平台工作位置的变换
设定稳定平台初始工作位置为[18,0,2.4],纵向摇摆角2°,横向摇摆角3.6°,则经过纵摇和横摇后工作位置变化为
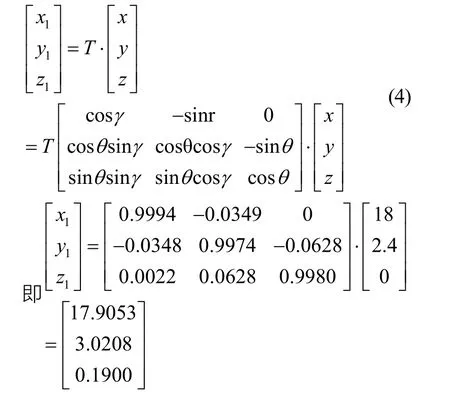
经过计算,波浪运动补偿稳定平台相对于大地坐标系在纵向移动 0.094 7 m,沿船首方向移动0.620 8 m,沿右舷方向移动0.190 0 m,空间总位移0.656 m。
3 Adams多体运动学仿真
3.1 Adams模型设定
利用三维软件构建 1︰1母船实体模型,导入Adams多体运动学仿真软件中,对模型进行运动学仿真,导入模型如图3所示。
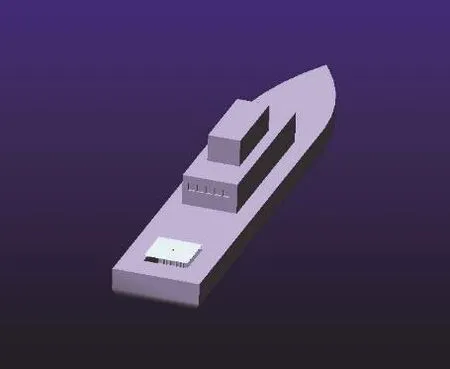
图3 导入Adams的母船模型
首先确定母船摇摆中心,并将母船摇摆中心移动自由度和垂直甲板方向的转动自由度锁定,剩下产生横摇和纵摇的2个旋转自由度;将波浪运动补偿稳定平台与中心导引点锁定在母船甲板上,在母船摇摆时,波浪运动补偿稳定平台与中心导引点跟随母船同步摇摆。
3.2 摇摆参数设定
模型绕Z轴摇摆产生横摇,由于横摇幅值为3.6°,周期为 10 s,则纵摇随时间的角度驱动函数RotZ=3.6°×π/180°sin(2π/12×time)。根据给定的纵摇幅值和周期,计算出纵摇角度驱动函数 RotZ=0.063×sin(0.52×time)。
模型绕X轴摇摆产生纵摇,由于横摇幅值为2°,周期为 10 s,则横摇随时间的角度驱动函数 RotX=2°π/180°sin(2π/12×time),根据给定的横摇幅值和周期,计算出横摇角度驱动函数RotX=0.035×sin(0.52×time)。
3.3 计算结果
波浪运动补偿稳定平台的导引中心位移变化如图4所示。母船横摇3.6°、纵摇2°时,波浪运动补偿稳定平台的导引中心产生的沿X、Y和Z轴方的最大位移分别为0.094 7 mm、0.620 8 mm和190 mm,和空间矩阵运算结果一致。
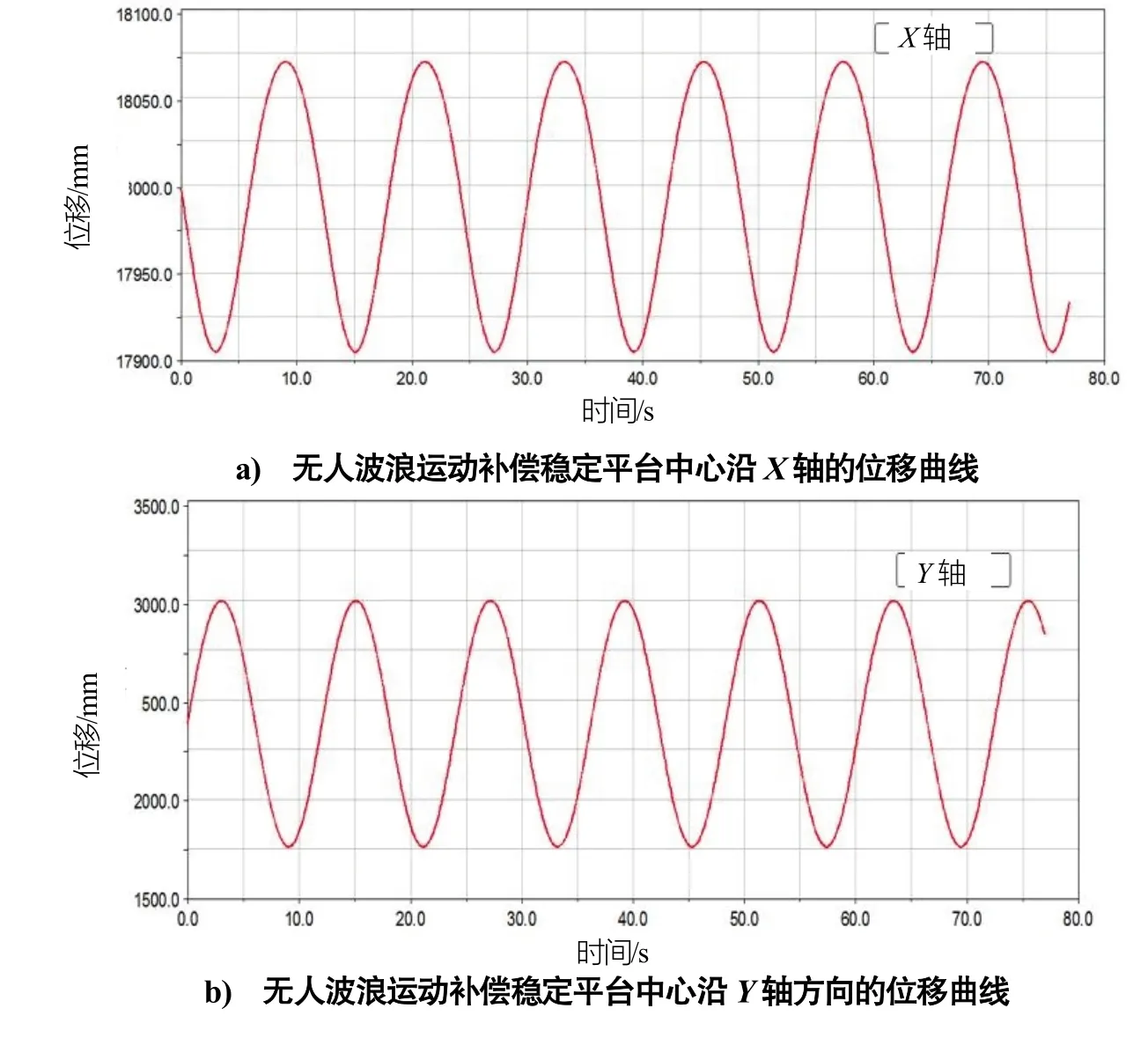
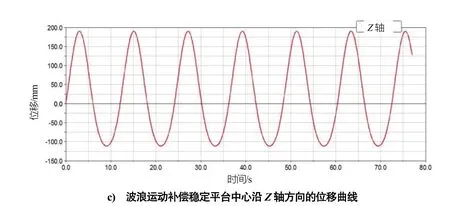
图4 波浪运动补偿稳定平台中心位移曲线
4 结论
波浪运动补偿稳定平台的补偿量可通过母船的空间运动进行计算,利用空间坐标转换矩阵可还原母船的纵摇、横摇等运动,实现平台相对大地坐标系的相对稳定。本文利用Adams多体动力学仿真,通过球副的转动模拟现实母船的横摇和纵摇,验证了空间坐标转换运算的正确性。
