基于EPBi系统的动态制动控制策略设计
2019-11-01张志阳朱苏磊
张志阳 朱苏磊
摘 要: 为避免车辆在主动制动系统失效后,采用驻车制动系统制动时发生后轮抱死甩尾、侧翻等危险情况,提出了一种基于集成式电子驻车制动(EPBi)系统的动态制动控制策略.根据EPBi系统的相关特性,确定了卡钳的控制方式.结合实际路况,实现了智能化的控制方式,同时在装备了EPBi系统的实验车辆上对控制策略进行了各种路况下的实验验证.实车验证结果表明:所提出的动态制动控制策略满足企业和国家相关标准要求.
关键词: 集成式电子驻车制动(EPBi)系统; 动态制动; 滑移率; 控制策略; 实车验证
中图分类号: TP 27 文献标志码: A 文章编号: 10005137(2019)04038706
Abstract: In order to avoid the dangerous circumstances of the rear wheel antilocking tail and rollover when the vehicle braked using the parking brake (EPBi) system after the active brake system failed,a dynamic braking control strategy based on EPBi system was proposed in this paper.By determining the related parameters of the EPBi system caliper,the control method of the caliper was defined.Whats more,combining with the actual road conditions,the intelligent braking method was realized.At the same time,the experimental strategy under various road conditions was verified on the experimental vehicle equipped with EPBi system.The results of the experiments showed that the dynamic braking control strategy proposed can satisfy enterprise standards and national standards.
Key words: integrated electronic parking break (EPBi) system; dynamic braking; slip ratio; control strategy; real vehicle verification
0 引 言
傳统的电子驻车制动(EPB)系统利用独立的EPB控制器进行控制制动操作,集成化程度较低,安装成本较高,占用车空间较大,开发周期较长.对此,本文作者将EPB控制器整合到车身电子稳定性控制(ESC)系统中,提出一套集成式电子驻车制动(EPBi)系统,以此实现驻车功能.
EPBi系统将行车过程中的临时性制动和停车后的长时性制动功能整合在一起,并用电子控制方式实现停车制动[1].本文作者根据后轮滑移率的算法、卡钳执行器的工作特性和相关滑移率的限值,设计了车辆动态制动的控制策略,并通过各路面的实车实验,使得主要的制动参数达到GB 7258—2017的要求.
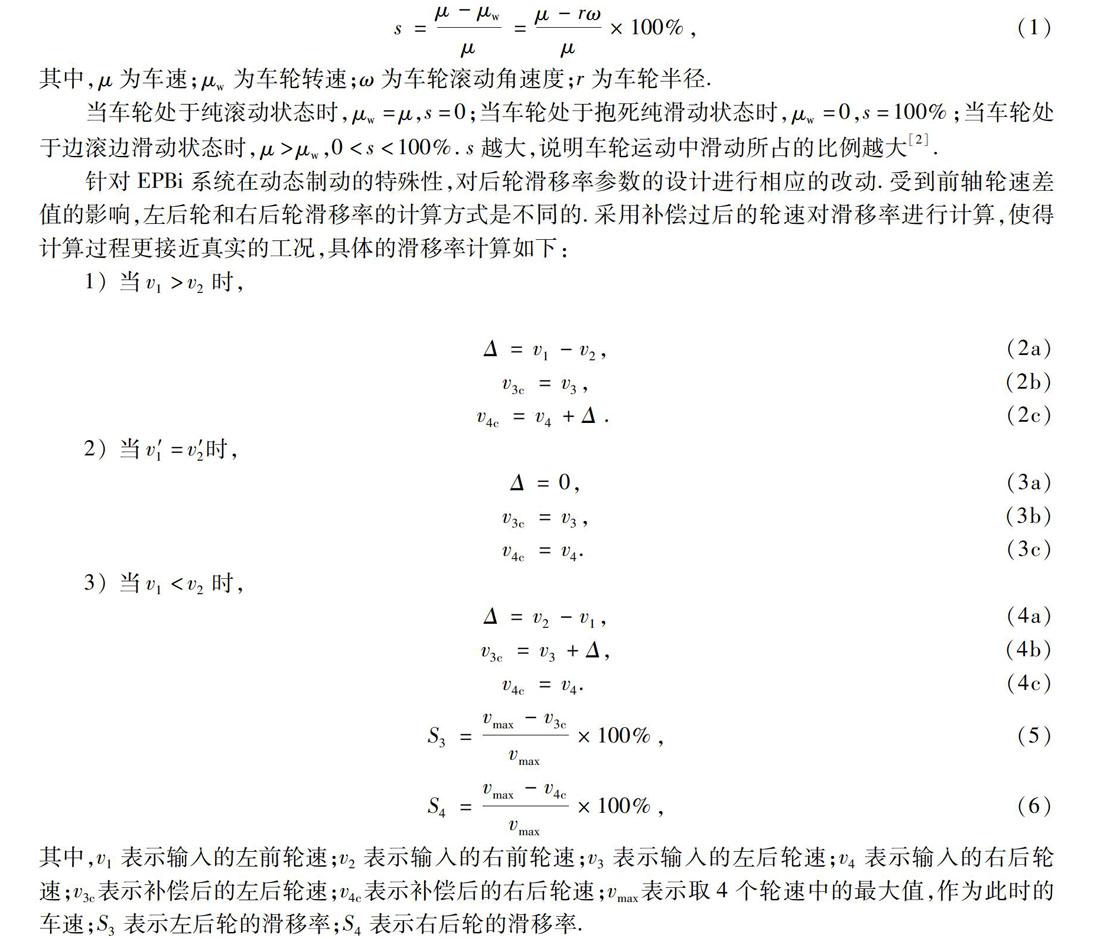
2 集成式电子驻车系统(EPBi)动态制动控制策略
对动态制动功能所需的制动力控制可转换为对相应的电机电流的控制[3].为了应对不同路况动态制动的要求,提出自动识别不同附着系数路面的动态制动控制算法,主要包含两个方面:1) 第一次快加压后一定时间内,将车辆滑移率与不同路面的滑移率限值作比较,判断车辆处于哪种附着系数的路面,并标识该限值;2) 识别结果经一段时间后失效,通过比较当前车辆减速度与不同路面的减速度限值,获得下一路面的识别结果,该限值由后期标定获得[4].动态制动控制策略步骤如下.
1) 左、右后轮卡钳电机同时进行第一次快加压,并实时计算两轮的滑移率,直到一侧滑移率超过第一次快加压滑移率限值,或者电机电流超过第一次快加压截止电流限值,同时进入保压模式,目的是在低附路面(冰面、雪面或湿滑瓷砖路面等)条件下,保证车身稳定.
2) 第一次快加压结束后,进入保压模式,但保压时间不得超过第一次快加压结束后最大保压时间限值,并实时监测左、右后轮的滑移率.如果滑移率超过第一次路面识别的低附路面滑移率限值,则该侧轮处于低附路面;如果滑移率一直小于第一次路面识别的高附路面滑移率限值,则该侧轮处于高附路面(柏油马路或水泥路面等);如果滑移率处于高附路面和低附路面限值之间,则为中附路面.如果滑移率小于第一次快加压结束限值,则缓慢加压.第一次保压过程中,滑移率超过第一次快加压减压滑移率限值,立即减压,直到轮速越过最小值开始重新加压;滑移率小于减压滑移率限值,停止减压,进入保压模式.
3) 第一次快加压结束一定时间后,进入动态制动过程,路面识别依据车辆减速度判断,高附路面减速度限值为2 m·s-2,低附路面减速度限值为0.5 m·s-2.
4) 第一次路面识别完成后,按照当前识别路面参数进行控制[5].每次减压、保压后,当滑移率低于增压滑移率限值时,要快速增压一次,快速增压步长可根据最近一次的减压时间确定.
3 实验结果与分析
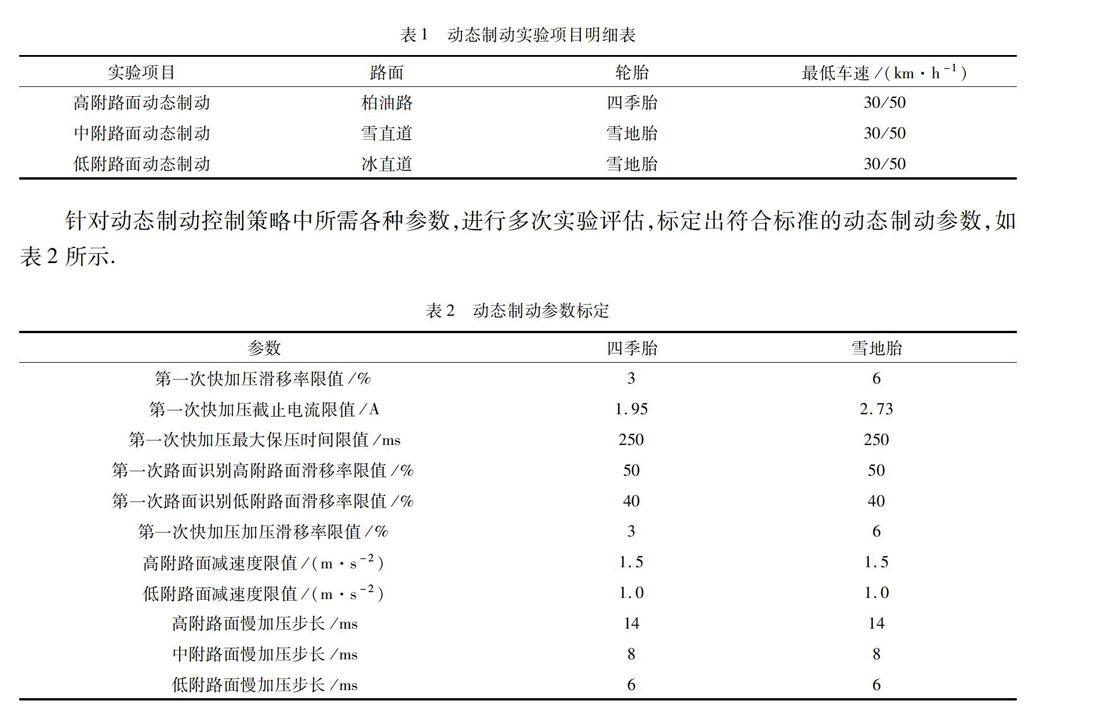
在安装了EPBi系统的某款1.5T自动档SUV车辆上进行动态制动实验,利用DEWESOFT软件采集制动初速、制动时间和平均减速度(MFDD),将电脑与车身内的车载自动诊断系统(OBD)接口相连.当驾驶员在一定速度的情况按下EPB开关,并打开配置好参数的软件,车身控制器局域网(CAN)会发送车身轮速和横摆角速度传感器信号到控制器中,再通过信号采集软件采集上述信号[6].实验车辆荷载为空载或满载,档位为空档,依据企业标准和整车厂标准进行实验,具体的实验项目如表1所示.
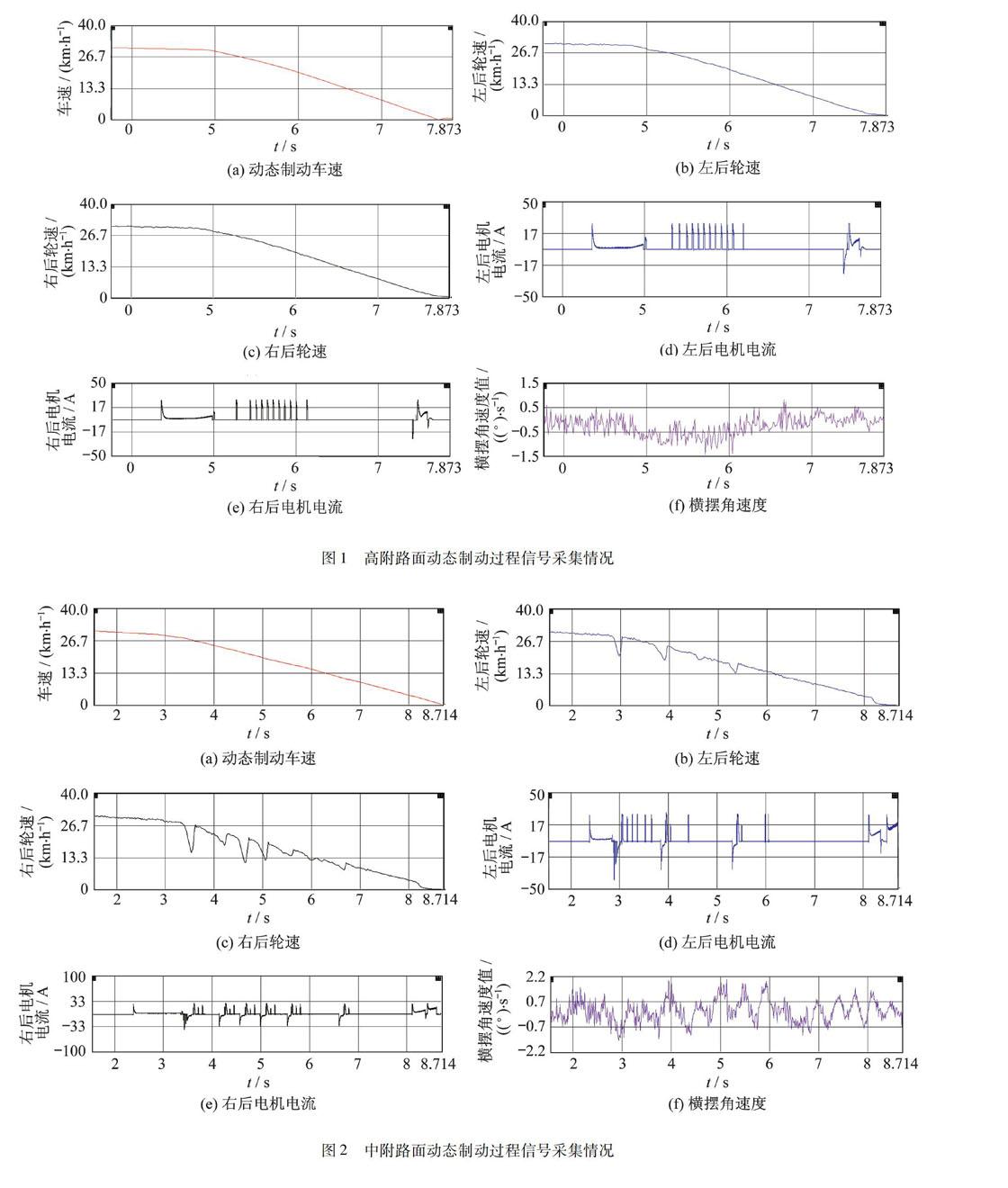
在此标定参数的基础上,分別在高附柏油路面及黑河寒区实验基地的中附雪直道和低附冰直道下,对车辆进行动态制动功能测试,图1~3分别显示了高、中、低附路面上满载情况下,实验车辆在制动初速为30 km·h-1左右的动态制动效果.
从图1~3中可以看出,实验车速在各类路面动态制动过程中都呈线性递减趋势,后轮轮速的增减呈现出周期性,且未出现车轮抱死情况.根据本实验所采集的数据,计算车辆在高附路面下的MFDD为3.10 m·s-2,大于整车厂规定的2.50 m·s-2要求;车辆在中附路面下的MFDD为1.42 m·s-2,大于整车厂规定的0.80 m·s-2要求;车辆在低附路面下的MFDD为0.61 m·s-2,大于整车厂规定的0.50 m·s-2要求;且在各类路面下,车辆稳定性良好,未冲出车道.
对比电机电流曲线可知:车辆在动态制动过程中,成功识别了路况,并按相应的控制策略完成车辆的动态制动.详细的实验报告如表3所示.
4 结 论
对EPBi的动态制动功能的控制策略进行了设计,并根据在各类附着系数的路面下实车实验的结果,分析了动态制动中车速与后轮轮速的变化过程,以及卡钳电机电流的变化规律,证明了该控制策略能够达到企业和整车厂规定的标准和要求.
参考文献:
[1] 马尔从.迈腾车电子驻车系统的功能及工作原理 [J].汽车维护与修理,2012,21(9):57-59.
MA E C.Function and working principle of electronic parking system of Magotan car [J].Auto Maintenance and Repair,2012,21(9):57-59.
[2] 苑庆泽,王洪亮,皮大伟.电子驻车制动系统(EPB)直流电机匹配研究 [J].汽车零部件,2013(3):103-105.
YUAN Q Z,WANG H L,PI D W.Research on the matching of the electronic parking brake [J].Automobile Parts,2013(3):103-105.
[3] LEE Y O,JANG M S,LEE W G,et al.Novel clamping force control for electric parking brake systems [J].Mechatronics,2011,15(6):1156-1162.
[4] 饶剑,黄妙华,刘飞.汽车线控技术的应用及关键技术 [J].汽车电器,2015,9(9):1-4.
RAO J,HUANG M H,LIU F.Application and key technologies of automotive wire control technology [J].Automotive Electronics,2015,9(9):1-4.
[5] 辛登岭,张建明.电子驻车制动系统的开发与应用 [J].上海汽车,2011(10):12-16.
XIN D L,ZHANG J M.Development and application of electronic parking brake system [J].Shanghai Automobile,2011(10):12-16.
[6] 王超勇.车辆电子驻车制动(EPB)控制系统的硬件设计研究 [D].南京:南京理工大学,2009.
WANG C Y.Research on hardware design of vehicle electronic parking brake (EPB) control system [D].Nanjing:Nanjing University of Science and Technology,2009.
(责任编辑:包震宇)
