基于图像处理的长距离车道线检测
2019-10-21马泉钧何自超林邦演曾文轩
马泉钧 何自超 林邦演 曾文轩

摘 要:小车在平稳路面行驶,同时前方无车辆障碍,基于此,本研究设计了长距离车道检测系统。在识别车道线时,利用输入的视频进行图像预处理,提取感兴趣区域,获取车道线的最大区域,对其进行透视变换和标定,使用Sobel算子对其二值化,使用滑块法拟合车道线并标定,输出检测后的标定视频文件。该系统能有效检测更远距离的车道线,可以应用于快速行驶路段与有清晰车道线的高速公路。
关键词:车道线检测;边缘检测;智能交通;长距离检测;透视变换
中图分类号:TP391.41文献标识码:A文章编号:1003-5168(2019)29-0111-03
Long Distance Lane Detection Based on Image Processing
MA Quanjun HE Zichao LIN Bangyan ZENG Wenxuan
(Guangzhou College of South China University of Technology,Guangzhou Guangdong 510800)
Abstract: The car is running on a smooth road with no vehicle obstacles in front. Based on this, this study designed a long-distance lane detection system. When the lane line is identified, the input video is used for image preprocessing, the region of interest is extracted, the maximum area of lane line is obtained, perspective transformation and calibration are carried out, binarization is conducted with Sobel operator, lane line is fitted and calibrated with slider method, and the calibration video file after detection is output. This system can effectively detect lane lines at longer distances and can be applied to fast-moving road sections and highways with clear lane lines.
Keywords: lane detection;edge detection;intelligent transportation;long-range detection;perspective transformation
近年来,人为因素导致车辆偏移车道而引起的交通事故屡见不鲜。中国的驾驶人整体年龄呈现上升的趋势,作为汽车主动安全技术的一部分,车道线检测对于车辆行驶安全有着重要的意义。长距离的车道线检测主要运用于高速公路等汽车行驶时速高的路段,能更早地对偏移进行检测,保证在高速行驶且制动距离较远的情况下能提前检测出偏移情况,增加驾驶员的反应时间[1-3]。车道偏移预警系统可以在形成交通事故之前对行驶情况做出检测,避免人为因素而导致车辆偏离,也可避免驾驶人疲劳而导致的交通事故。
图像预处理是车道线检测中的重要一环,其目的是更加明确地区分车道线与背景[4]。在车道线的提取中,本方案对感兴趣区域的区间进行扩大,可以处理更长的车道线。摄像头提取的图片并不是灰白图,但可以通过设置一个阈值把车道线分离出来。本文通过摄像头采集的图片,分解出RGB单通道图片,确定图片的优先像素,通过Sobel算子的应用,对图像进行二值化及轮廓提取,筛选出车道线的轮廓。在车道线的检测中,大多采用霍夫算法进行车道线的提取,但是霍夫算法在提取曲线上显得比较困难,本文运用了滑块处理的方法,结合霍夫变换对直线进行检测。
1 研究思路
通过摄像头采集的图像信息,利用棋盘法标定、校正图片信息,对图像进行感兴趣区域提取,对图像进行优先像素处理,利用Sobel对图像进行灰度变换和边缘检测,再结合霍夫算法及滑块法对检测后的图像进行提取。最后利用最小二乘法筛选符合的车道信息进行拟合标定。本研究流程如图1所示。
2 车道线检测
2.1 图像的感兴区域提取
直接对拍摄视频进行车道线处理,会受到各种树木、小车、天空等因素的影响,使得检测结果达不到预期。试验发现,在感兴区域的提取中,可以对天空区域进行截取,保留路面部分,从而检测到更多的车道信息。本试验的感兴趣区域设置在汽车的行驶道路图像中。
2.2 图像灰度及二值化
图片的处理中,最先开始的是对图片的灰度化及二值化。图片灰度化的对象是真彩图片,其由3通道R/G/B组成,而灰度图像由这三通道的颜色合成一通道的图像,即一个像素代表计算机的8位,用数字0~255来代表。而二值是利用设定的阈值[T],当像素值[P]大于阈值[T],则[P]=255,否则[P]=0。
2.3 优先像素
在车道线的检测中,黄色和白色是其优先像素。车道线检测大多采用直接转换为灰度的方法,它无法对车道线进行优先处理,会损失掉部分的车道信息。提出优先像素将提高检测的稳定性。
车道线一般为黄色和白色,對应的[R]、[G]、[B]值有两组,分别为{255/255/0}{255/255/255},以白、黄像素RGB的相关性作为约束提取车道像素,分别对单通道R/G两张图像进行处理。由于感兴区域大多像素为背景像素,将感兴区域的像素值由大到小进行排列,只对像素值前50%的像素进行处理,极大地增加了处理效率。
2.4 图像的透视变换
在检测车道线的过程中,由于视屏视角的偏差,车道线沿透视点收缩,因此对车道线进行透视变换可以将车道线投影在平面上,获得车道的俯视图。其原理是利用原有的图像对车道线进行标定后进行映射变换,具体变换公式如下:
[XYZ=a11a12a13a21a22a23a31a32a33xy1] (1)
2.5 利用Sobel算子进行边缘检测
Sobel算子是一种理想的差分算子,主要用于图像的边缘检测,用来运算图像的高亮度函数及灰度的近似值。Sobel的卷积因子如图2所示。
利用卷积因子对图像的每一个3×3像素进行卷积运算,Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘,对噪声具有平滑作用,可以提供较为精确的边缘方向信息。
2.6 霍夫变换及滑块法检测车道线
霍夫变换运用两个坐标空间之间的变换,将在一个空间中具有相同形状的曲线或直线映射到另一个坐标空间的一个点上形成峰值,从而把检测任意形状的问题转化为统计峰值问题。其映射公式为:
[ρ=xcosθ+ysinθ] (2)
由于霍夫变换易受光等因素影响,结合滑块法进行检测。遍历图像将不为0的元素存储在数组中,确定基点坐标,设置必要的初始化参数,包括滑块的迭代个数,并依此计算窗高、初始基点坐标、窗宽基数和建立存储数组等,当窗内有效像素个数小于预设最小值时,以窗宽基数为单位递增窗宽,直到满足最小像素个数。以有效值的平均值作为下个滑块的基点进行迭代运算,结束后用最小二乘法拟合得到车道线。
3 试验结果
为了验证本研究的效果,采取使用行车记录仪所拍摄的视频(见图3)作为原素材导入,利用Python编写程序,对视频文件进行处理后,输出处理后的视频文件来完成试验。
3.1 图像感兴趣区域的提取
对本文所用的素材进行分析,需采用的像素区域为0~[H]/2,对原图像提取效果如图4所示。
3.2 图像灰度化
本文采用的灰度化方式是优先像素灰度化法,对黄白进行优先处理。处理效果如图5所示。
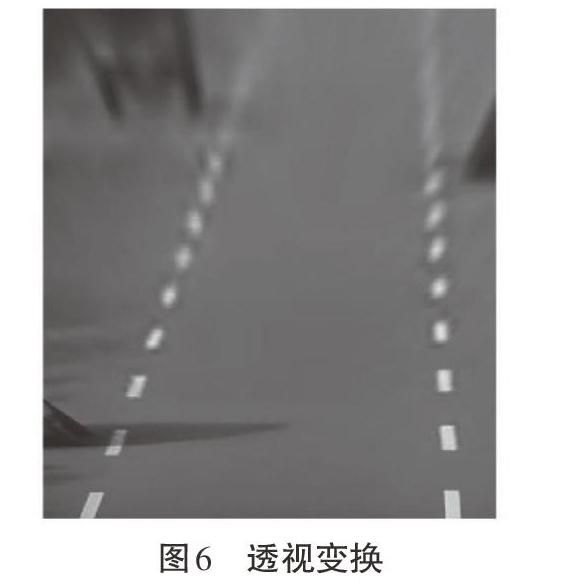
3.3 透视变换
本文采用的是基于OpenCV的透视变换,对选取标定好的车道线,设置变换区间:原图像的四个角点为(180,720)、(675,388)、(690,388)和(1 170,720),变换后的四个角点为(320,720)、(320,0)、(960,0)和(960,720)。透视变换效果如图6所示。
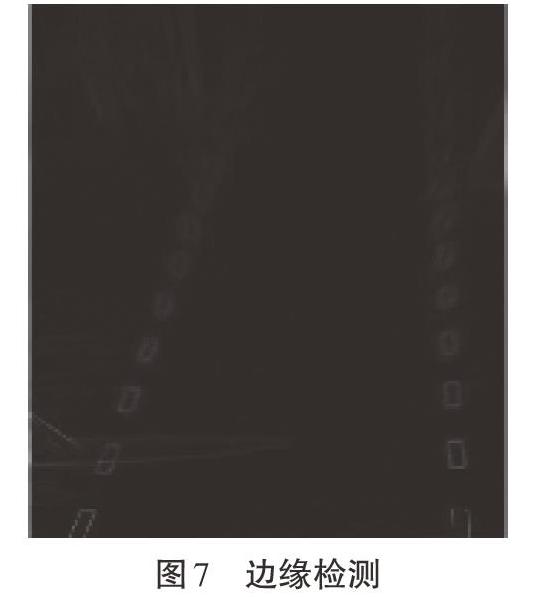
3.4 边缘检测
本文采用的是Sobel算子进行边缘检测,效果如图7所示。
3.5 车道线检测并标定
对边缘检测结果进行霍夫运算及滑块运算,用最小二乘法拟合曲线得到车道线,对车道线区域进行綠色处理返回原图像,得到车道线标定图,如图8所示。
4 结论
本研究使用Sobel算子进行图像的边缘处理,导致车道线边缘标定出现偏差,本文使用的滑块加霍夫拟合曲线可以双重保障车道线的完整性。在后续的工作中,人们要进一步研究图像的预处理,使得本系统更加完善,提高其精确度。
参考文献:
[1]管欣,董因平,高振海.基于LMedSquare的车道曲线拟合算法[J].吉林大学学报(工学版),2004(2):194-197.
[2]季聪.基于双目视觉的智能车辆路径识别方法研究[D].兰州:兰州交通大学,2013.
[3]马雷,武波涛,王连东.弯曲道路识别方法与目标函数选取的研究[J].汽车工程,2008(7):561-565.
[4]袁启平,宋金泽,吴涛.基于逆透视投影变换的图像拼接方法[J].微计算机信息,2010(26):208-209.
