非结构环境需求下的液压四足机器人设计
2019-10-16路可欣秦建军
路可欣,秦建军
(北京建筑大学 a.机电与车辆工程学院;b.城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
在产品设计初期,对繁多冗杂的需求进行系统性分析[1-3]已成为赢得市场、提高企业核心竞争力的关键所在,系统性分析也成为国内外学者的研究重点。Zaim等[4]将分析网络过程与模糊逻辑法相耦合,提高了需求响应速度。刘普寅等[5]基于加权Euclid距离的模糊聚类方法,使需求聚类质量得以改善。为突破多粒度语言环境下的需求模糊性与不确定性问题,He等[6]改进传统卡诺模型,提升了识别需求的精准度。为进一步提高需求向产品设计转换的科学性,Wang等[7]基于朴素贝叶斯分类器的需求分类法,使产品设计更加科学可靠。
液压四足机器人因其功率密度比大、驱动力大与环境适应能力强等特点,作为野外环境下的特种机器人得到了国内外学者的普遍关注,其主要作业场地多以非结构化地形为主,故本文以该环境特征为例进行分析,最终结合不同环境需求,实现对液压四足机器人的设计。为避免机器人在野外非结构环境下导致的复杂需求聚集问题,Chu等[8]定义了拟合系数,利用区间模糊数算法建立权重等级隶属度函数,确保了需求客观标准与主观语言的一致性。在提高机器人性能方面,韩国工业技术研究院的P2机器人[9]采用液压马达带动关节旋转,消除了直线运动转化为转动时的非线性,使控制更加简单。中国上海交通大学的四足机器人[10]通过混连式腿部结构,将全部的驱动液压缸集中在躯干,减轻了腿部负荷,提高了控制精度。在解决高动态下的机器人行走问题方面,MIT的Cheetah机器人[11]采用阻抗控制和虚拟模型相结合的控制框架,提高了行进速度。美国麻省理工大学的猎豹机器人[12]采用腿部关节与脊柱关节的仿猫科类构型,结构更合理精细,进一步解决了机体的轻量化问题。
由此可以看出,面对非结构环境需求下的液压四足机器人设计问题,大多数学者分别从环境需求分析与提高机器人性能两方面单独进行研究,从不同角度对液压四足机器人进行设计。由于液压四足机器人不同于普通的产品,在整个设计过程中要考虑环境需求这一重要约束条件,对复杂需求进行分析及聚类,进而从多个方面共同考虑,实现对机器人的设计。为此,本文提出了模糊非解耦模型与FPBS耦合的设计方法,通过建立模糊非解耦矩阵对需求进行层次划分,以获取需求的精准聚类,同时基于功能-原理-行为-结构模型,实现设计层级的迭代,满足产品系统化以及自顶至下多层级的设计要求,使最终方案得到需求的快速响应。
1 非结构环境对机器人的影响
移动机器人主要分为轮式、履带式和足式3类,其特点各不相同,如表1所示。在野外环境中,遍布着崎岖不平的山丘、丛林以及沟壑等,这些复杂环境使轮式和履带式机器人无法正常运行,而足式机器人因其较强的环境适应能力而被广泛应用。
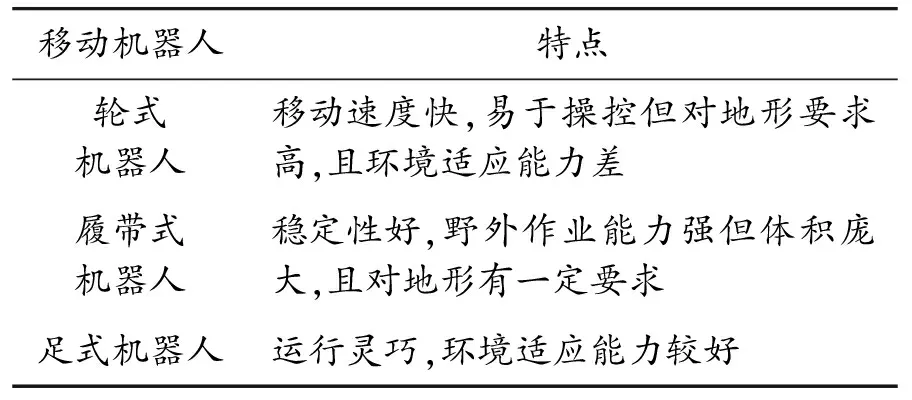
表1 移动机器人特点
国内外学者研发的四足机器人因其运行的环境需求不同而具备不同的结构,从而特点也不尽相同,如表2所示。在野外非结构环境下,地形的差异会对机器人带来诸多影响,具体如表3所示。
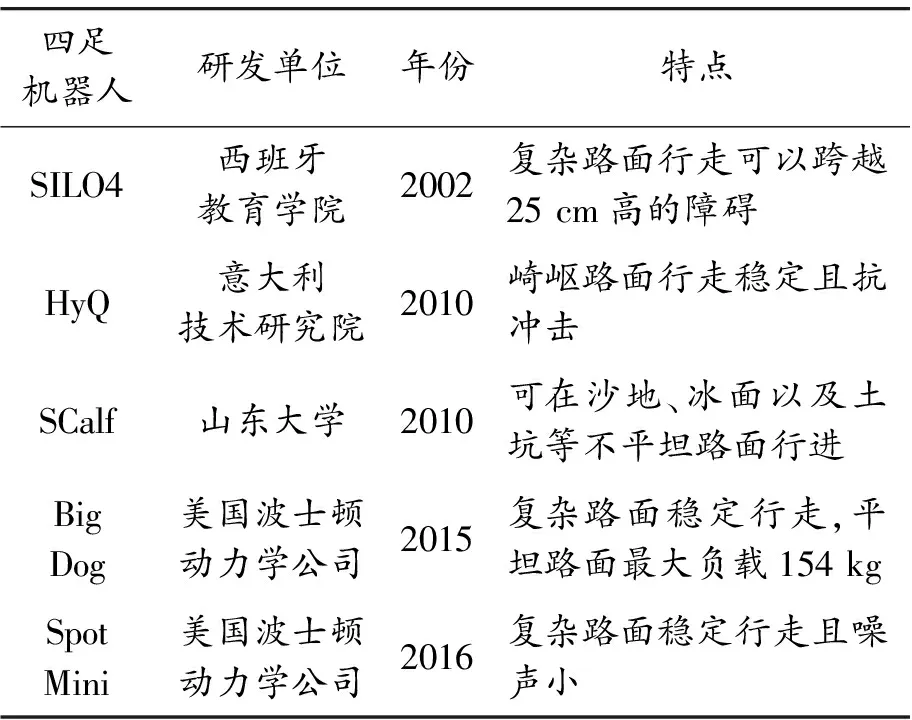
表2 国内外四足机器人及其特点
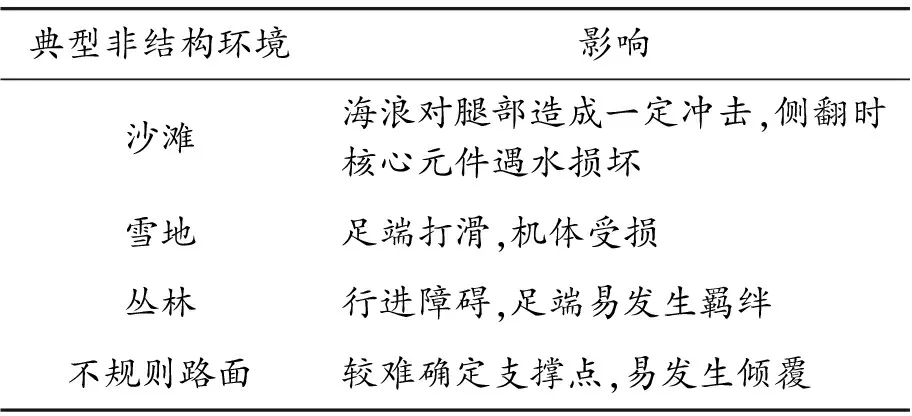
表3 典型非结构环境对机器人的影响
2 非结构环境下的需求聚类
2.1 产品质量屋
产品质量屋(house of quality,HoQ)是将用户需求与产品工程特性、过程控制以及生产运营等多方面联系在一起的矩阵[13],也是质量功能展开(quality function development,QFD)的重要工具。产品质量屋如图1所示,天花板为产品所有工程特性,由用户需求转换而来;左墙为用户需求及重要度所构成的输入矩阵;右墙依次为竞争企业参数、用户满意度、目标、水平提高度、销售点、绝对权重及相对权重;屋顶表示产品各项工程特性间的关联关系;房间为用户需求与工程特性间的关系矩阵;地板由分解得出的功能权重构成质量屋输出矩阵。
由QFD团队专家根据市场调研等方式确定产品质量屋中用户需求及其重要度,利用层次分析法(analytic hierarchy process,AHP)确定m项用户需求重要度,其定义式为
(1)

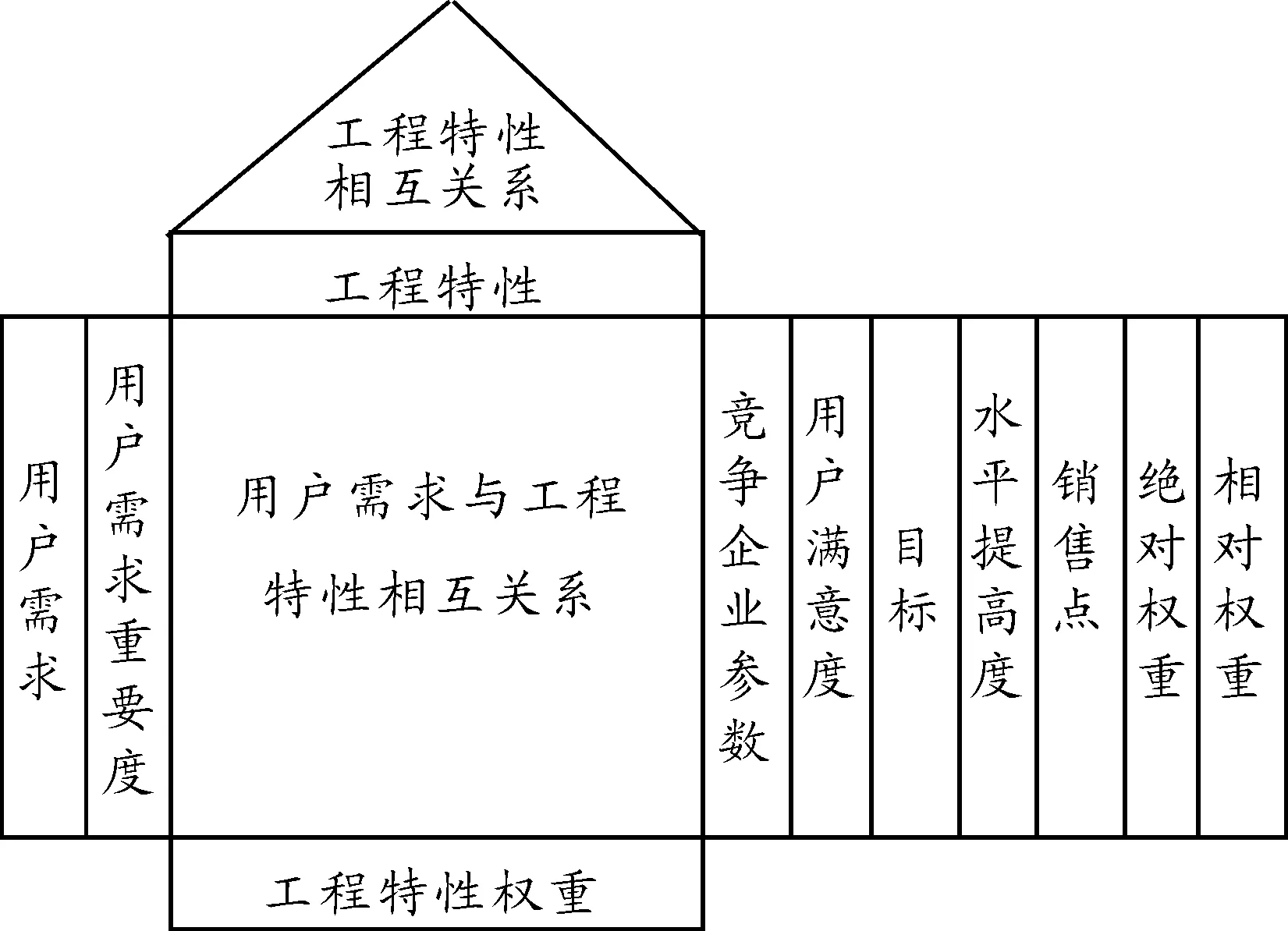
图1 产品质量屋
重要度转化方法分为比例分配法与独立配点法,其中比例分配法为用户需求的数目与分布会影响工程特性重要度的结果,而独立配点法可以改进评价差异,故采用独立配点法将重要度转换为工程特性重要度,其定义式为
(2)

将用户需求转化为工程特性,得到工程特性重要度。将所得到的工程特性权重用于多目标优化设计中的加权系数,进一步对产品优化,充分反映用户需求。
2.2 模糊非解耦模型
用户需求聚类分析是产品设计初期关键的一步,为了科学地将用户需求进行层次划分,采用模糊非解耦模型,具体步骤如下:
步骤1 用户需求信息标准化。将获取的用户需求分为阶梯型与平等型两种。阶梯型为用户需求属性,具有差异性,例如质量、效率等。平等型为用户需求相互平等、独立且无差异性,将阶梯型用户信息聚集在系统前部,平等型用户信息聚集在系统后部,为将信息标准化,可建立信息标准化数学模型。
(3)
式中:i=1,2,…,m;γ′为信息原始数值;γ为信息标准化后数值。
步骤2构建模糊相似矩阵。将信息系统前部阶梯型的均值转化为平等型属性值,其定义式为
(4)
式中:k=l+1,l+2,…,n;dk为第k个属性的属性种类。
根据转化后的平等型属性值,将不同的平等型属性进行聚类,其定义式为
(5)
式中:tk为平等型属性,k=l+1,l+2,…,n。
用户对象集合γ={γ1,γ2,…,γm}中γi与γj的模糊相似度的定义式为
(6)

(7)
该矩阵满足自反性,即∀i=j,lij=1;同时满足对称性,即lij=lji,均代表γi=γj的模糊相似度。

(8)
步骤4构建截矩阵Λmatα=(αij)
(9)
式中i,j=1,2,…,n,α为等价闭包矩阵t(Λmat)中的元素。可通过α的不同取值得到不同的动态聚类,由QFD团队专家进行评估,选择最优聚类方案。
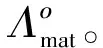
1)非耦合矩阵,保证需求间相互独立,即其中某一需求发生变化不会影响其他需求,故选取非耦合矩阵。
2)准耦合矩阵,其中某一需求按照一定顺序变化,保证另一需求的独立性。
3)耦合矩阵,其他类型的矩阵统称为耦合矩阵,不能保证需求间的独立性。
(a)非耦合矩阵 (b)准耦合矩阵 (c)耦合矩阵
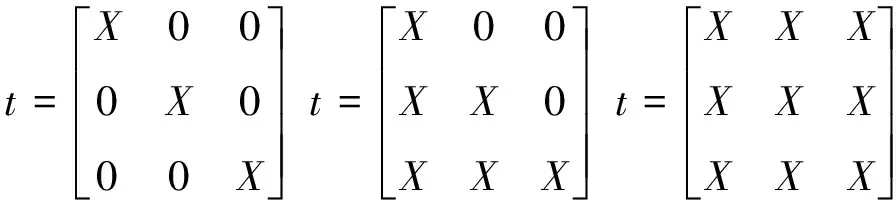
2.3 基于模糊非解耦模型的需求聚类

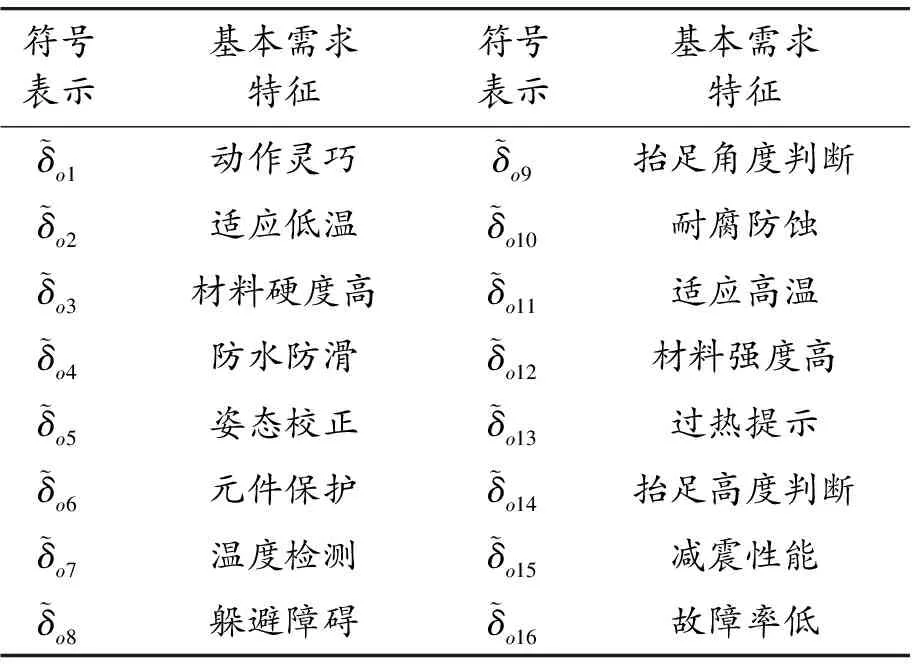
表5 液压四足机器人基本需求特征
表6 液压四足机器人基本需求与子需求对应权重
根据式(7)构建液压四足机器人的需求特征模糊关系的相似矩阵:




由此可知,液压四足机器人在非结构环境下的16种基本需求特征的解耦示意图如图3所示。同时根据α取值不同形成需求的细化分层。
QFD团队专家对液压四足机器人在非结构环境下的各项需求进行重要度评价,结合团队专家对需求特征隐性知识定量化表达,建立液压四足机器人需求特征与工程特性的产品质量屋。因不考虑工程特性之间的关系,故在产品质量屋中忽略屋顶,如表7所示,反映了需求特征与工程特性之间的相关性,在产品设计初期为企业指明了方向。
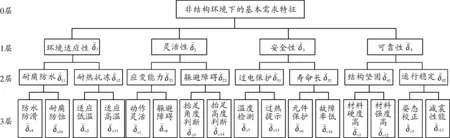
图3 非结构环境下的基本需求特征解耦示意图

表7 液压四足机器人产品质量屋
利用式(3)对液压四足机器人的工程特性进行计算并对其归一化,重要度排序如表8所示。
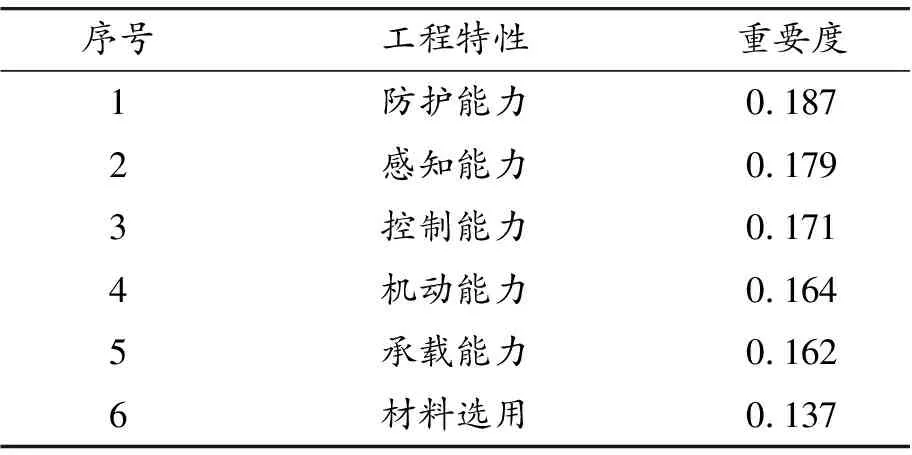
表8 液压四足机器人工程特性重要度排序
3 液压四足机器人结构设计
3.1 功能-原理-行为-结构模型
Gero J S等首先提出了功能-行为-结构(function-behavior-structure,FBS)的概念,将产品初期分为功能建模、行为建模、结构建模这3个设计阶段。国内学者廖莹[14]在此基础上引入了原理模型,提出了FPBS的迭代层次映射,使产品在设计初期综合考虑功能、原理、行为、结构这四方面要素,实现自顶至下多层次创新产品设计。同时,实现自底至上的产品结构综合,建立产品初期的拓扑模型是实现产品模型设计的重要工具,基于FPBS产品设计流程如图4所示。
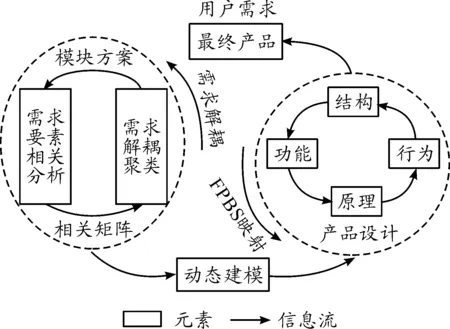
图4 基于FPBS产品设计流程
3.1.1功能
功能(function)包含3个方面内容:① 系统观点,功能是系统输入与输出以及元素变量间的抽象概念,描述输入输出关系的流程图表示功能结构,一般用于产品功能设计模块;② 用途观点,用来描述产品设计意图,将产品工作能力抽象化,用于用户需求模块;③ 行为观点,将功能看作物理行为,用于产品原理设计模块。
3.1.2原理
原理(principle)是实现产品特定功能的方法,一般包含两方面内容:① 物理效应,自然界现象的规律结果;② 功能载体,实现物理效应的实体,例如运动特性、机械特性、几何特性等,从功能到原理的映射如图5所示。
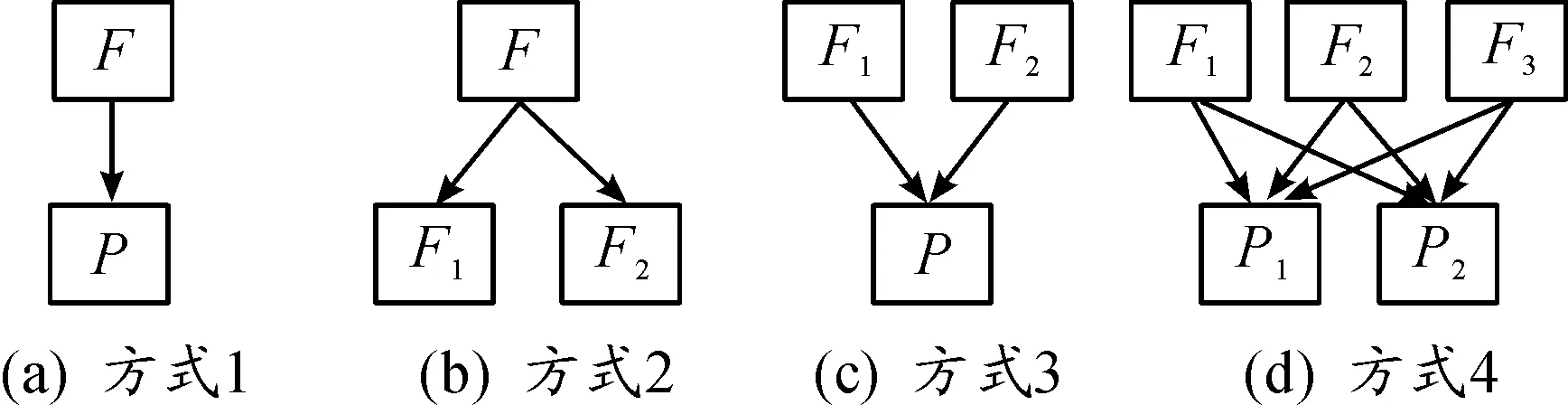
图5 功能-原理映射方式
3.1.3行为
行为(behavior)由原理产生且为原理的表现,通过产品多行为配合得以行为实现。产品行为由产品构件参数描述,例如位移、速度、加速度、角位移、角速度、角加速度和作用力等。从原理到行为的映射方式如图6所示。
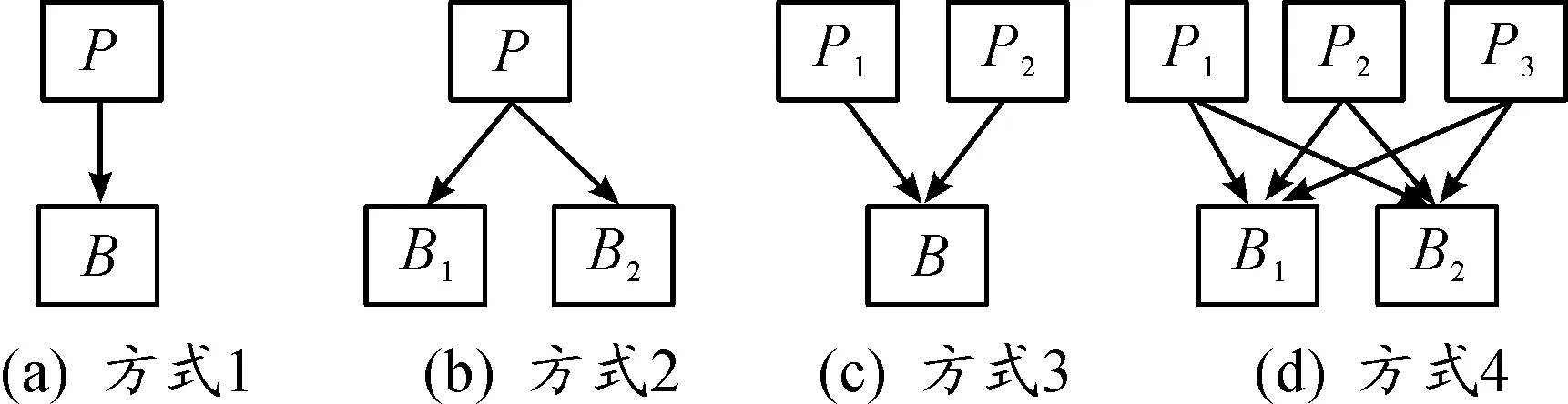
图6 原理-行为映射方式
3.1.4结构
结构(structure)是实现产品功能-原理-行为采用的构件以及之间的组成关系。物理结构指完整的产品、元件或几何特征,从行为到结构的映射方式如图7所示。
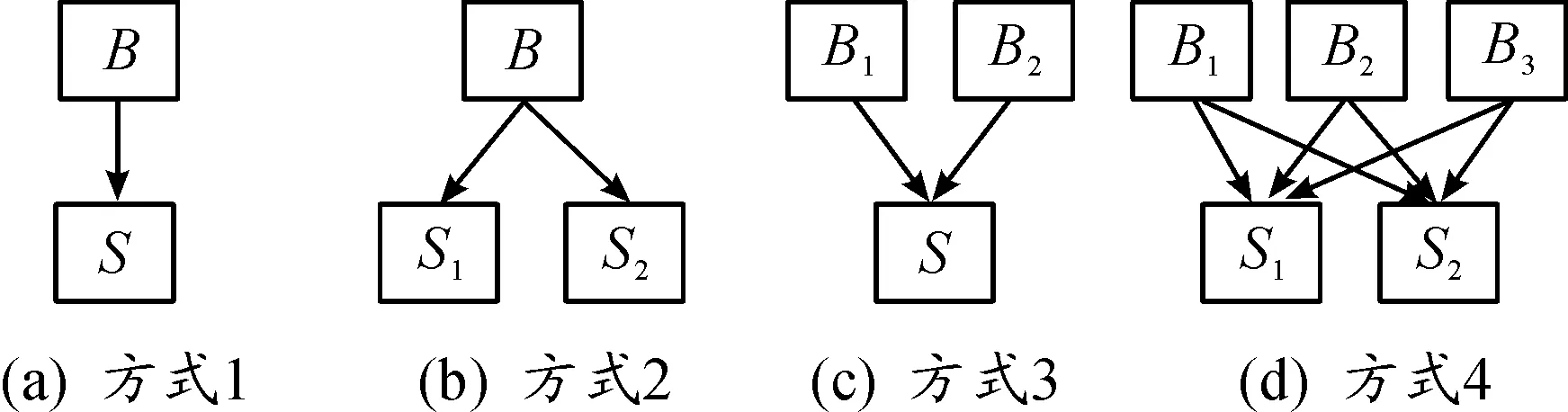
图7 行为-结构映射方式
3.2 基于功能-原理-行为-结构模型的液压四足机器人设计
由2.3节可知,液压四足机器人16种基本需求特征根据α的取值不同进行了解耦,得到逐步细化的需求聚类,并将需求与工程特性通过质量屋进行一一映射,实现工程特性的定量化表达。最后,QFD团队专家结合已有知识与相关科学原理,利用FPBS映射方法对液压四足机器人在非结构环境需求下进行结构设计,整理可得功能-原理-行为-结构的映射,如表9所示。
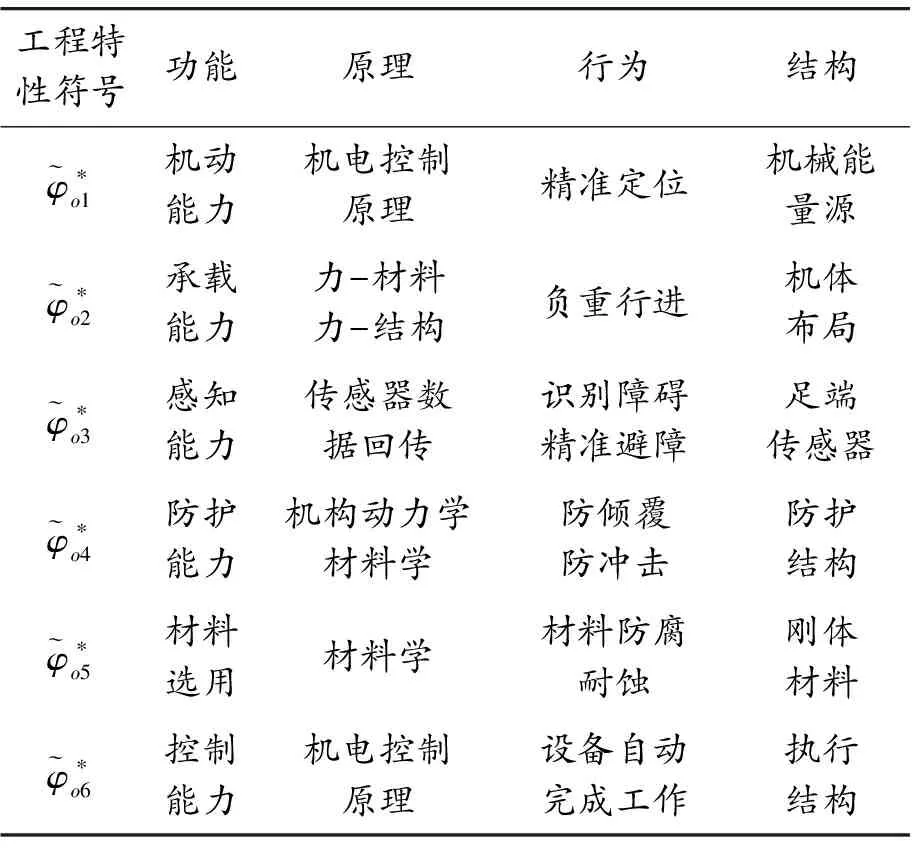
表9 液压四足机器人的FPBS映射
行为是功能的表现,由原理产生,并通过结构实现。由FPBS映射表可知机器人的6项基本行为。由于篇幅限制,以负重行进为例,为实现液压四足机器人的承载能力,机体采用刚体结构设计,该结构由相容行为的刚体执行构件组成,能够形成稳定的机体结构。当所有执行构件执行其运动行为时,也具有结构的平稳性,是机体合理布局的基础。其次,刚体机构可适应多变的环境,在机器人行进过程中,采用悬挂方式完成物资的快速运输,实现负重前行的功能,达到力-材料、力-结构的原理准则。此外,机体所有构件的行为不相矛盾,可以共存,实现了行为的相容性原则。
从FPBS映射表中获取液压四足机器人各功能的初步结构如下:
QFD团队专家利用已有经验与FPBS映射关系,将以上子功能结构进行汇总,得到满足非结构环境需求下的液压四足机器人(如图8所示)。

图8 液压四足机器人设计方案
该液压四足机器人为4自由度配置,其中膝关节、臀部侧展关节、臀部摆臂关节为主动运动关节,由3条液压缸推动关节实现铰接运动;足部为被动自由度。为减少运动时地面对机器人结构的冲击,膝关节与足端之间安装弹簧起到缓冲作用,通过液压缸活塞杆的收缩实现各关节转动。
与之相比,国外学者也对液压四足机器人进行了相关研究。以美国波士顿动力学公司的Big Dog机器人[15]为例,该机器人可进行多步态行走、跳跃1 m宽壕沟、爬越35°斜坡,最大运行速度可达18 km/h,达到步兵徒步急行军的速度要求。但传统方法一般通过仿真和片段性的模拟场景来验证机器人的总体性能,以仿真数据证明方法的实用性,较少对环境需求进行有效分析。但在真实的野外环境中,对需求的合理遴选与聚类是机器人设计的重要基础。本文采用模糊非解耦模型与FPBS耦合的设计方法对机器人进行设计,该设计方法的优点在于通过对非结构环境下的需求进行系统性分析,从功能、原理、行为、结构共4个方面分别进行考虑,得到满足要求的液压四足机器人设计方案,使机器人结构清晰、合理,提高了液压四足机器人设计的科学性。
4 结论
本文提出了模糊非解耦模型与FPBS耦合的设计方法,并将其应用于非结构环境需求下的液压四足机器人设计中。该耦合方法与传统产品设计理论相比,解决了传统方法对仿真数据分析的局限性及依赖性问题。从多个角度加以考虑,对复杂环境进行分析,将需求合理聚类,改进了产品设计流程,为产品设计提供初始依据,并从功能、原理、行为、结构4个方面实现自顶至下多层级的设计与自底至上的结构综合,提高模块间的内聚程度,在产品设计中具有引导性,具备如下特点:
1)采用模糊非解耦模型将信息定量分析,提高评判的准确性,实现产品结构综合,以及产品的快速构型,进一步满足了设计要求。
2)基于功能-原理-行为-结构的映射关系,将产品的功能、原理、行为与结构的纵向迭代设计清晰地表达,同时产品模型的横向设计体现了功能、原理与结构间的信息参数关联,实现对需求的快速响应,具备结构的相对独立性,为产品设计提供了有力支持。
