基于网络的自行小车控制原理的研究
2019-10-15董加旺
董加旺
(承德市五一四地质大队,河北承德067000)
1 引言
传统的自行小车控制系统,小车的控制是通过轨道内的滑触线进行控制的,根据小车不同的功能对滑触线进行分段控制,每一段滑触线对应一个信号接入地面控制站,小车的功能越多,需要的滑触线也越多,分段也越复杂。为了解决这个问题,出现了通过编码控制小车的输送系统,但通过编码也需要对滑触线进行分段,在进行工艺调整时仍需对滑触线进行调整,针对这个问题,本文提出了基于网络的无分段控制信号的设计方案。
在新方案中,滑触线只为小车提供电源,小车的控制信号通过有线或无线通信的方式进行传输,对空中轨道进行工位划分及功能定义,通过工位识别功能锁定小车,将工位调度指令写入工位内的小车,控制小车执行相应动作。在进行工艺调整时,只需对轨道功能进行重新划分及功能定义即可实现工艺调整,无需对滑触线进行调整,使自行小车输送系统更具柔性化,基本上满足了现代工业生产的需求[1]。
2 基于网络的自行小车控制原理
本文通过一个示例项目介绍基于网络控制的自行小车的控制原理及控制方法,在本方案中,设有1个上件工位、1个下件工位、1个检修工位、1个检修道岔、3个受控缓存工位、2个自动缓存工位,如图1所示。
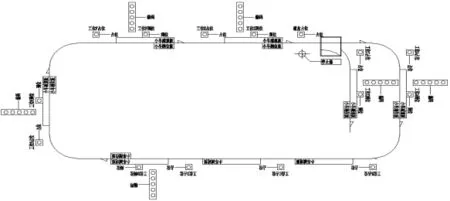
图1 测试平台
2.1 功能分析
在项目设计初期,根据技术要求对工艺线路进行规划,确认每个工位的功能并进行功能设计,以上件工位为例,上件工位主要完成工件的上件任务,并将工件转移到下一工位,其控制流程如图2所示。
小车运行到上件工位,小车发号板触发占位检测信号,上件工位占位,工位发号板触发小车减速开关,小车自动减速,小车发号板触发读码检测,工位读取小车代码,小车发号板触发到位检测,小车停止运行。小车运行到位后,自动下降,上件完成后,自动上升至高位,上件完成,并转运至下一工位。根据控制流程为上件工位布置开关如图3所示。
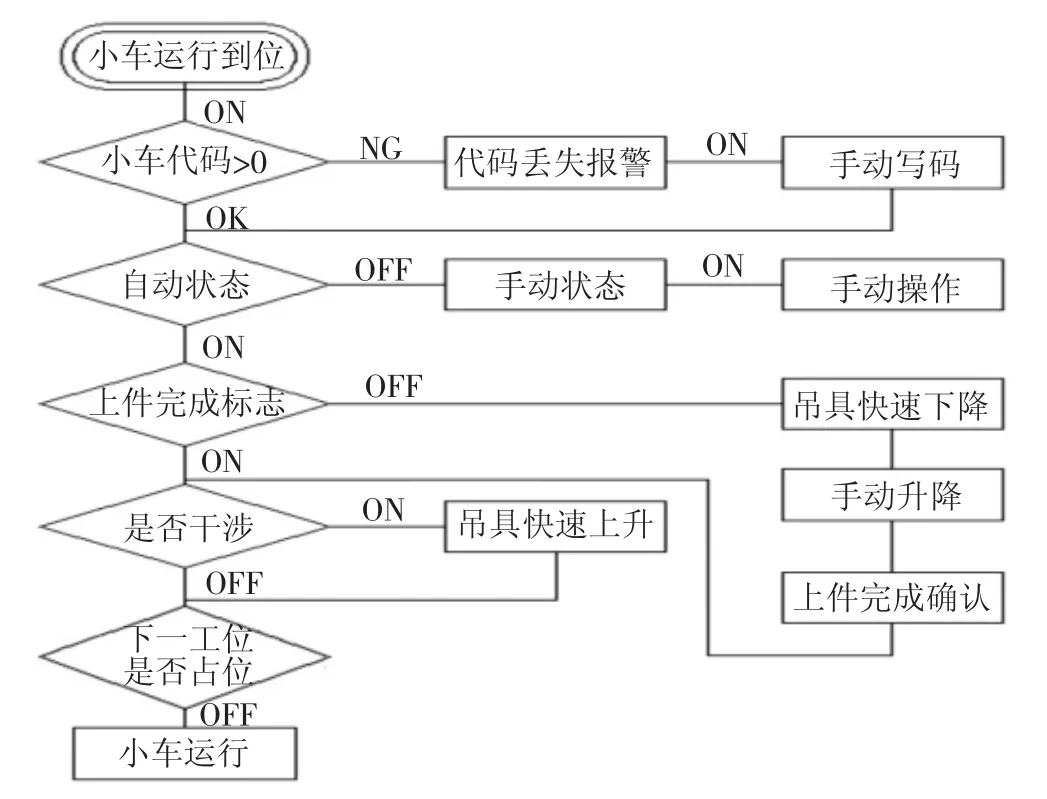
图2 控制流程
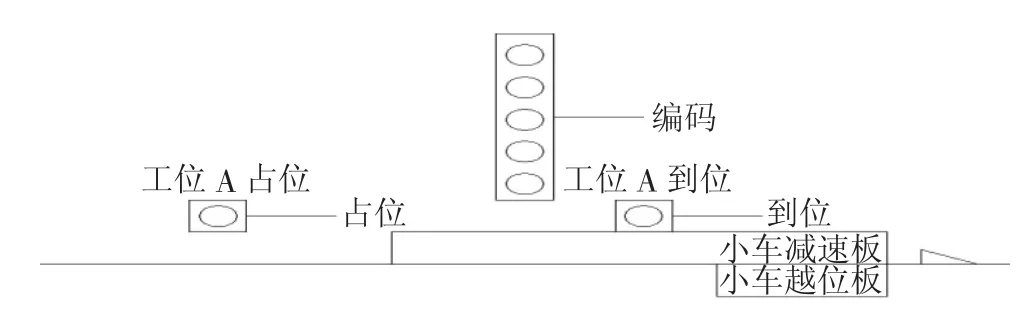
图3 开关布置
其中,占位与到位信号主要用于工位之间的调度程序,编码信号主要用于识别小车编号。在识别编号时,小车应处于低速状态,有利于编号的识别,小车减速板主要用于小车的缓起缓停,小车越位板主要用于小车无法正常停止时的越位保护。
下件工位主要完成工件的卸载任务,下件完成后小车空载转移到下一工位,其控制流程与上件工位类似可参考图2,其元件布置可参考图3。
受控缓存工位和自动缓存工位都是自行小车的临时停车位,区别在于受控缓存工位小车的运行停止由地面调度站控制,自动缓存工位小车的运行停止是小车根据运行中的干涉状态自动启停。其元件布置可参考图1。
2.2 控制分析
传统的自行小车控制系统只需要知道工位有没有车,就可以通过滑触线信号控制小车。基于网络控制的自行小车所有的控制信号及状态信号都是通过网络传输的。其控制系统不但需要知道哪个工位有车,还需要知道是哪台小车,才能准确地将控制信号发送给小车,小车也必须将知道处于哪个工位,才能将状态信号准确的发送给所在的工位。因此,通过网络控制自行小车需要解决以下3个问题:
1)地面站通过工位读码能知道小车的位置,但小车没有读码功能,如何让小车知道当前是哪个工位?
2)每个工位在不同时段会有不同的小车,如何将工位信号发送给每个工位对应的小车?
3)小车运行时会在多个工位穿梭,如何将小车的状态信号发送给所在的工位?
针对第1个问题,可以通过工位读出的小车编码转换成小车的工位号码,例如:
工位1读取小车码为1时,将1号车的工位编号写1;
工位1读取小车码为2时,将2号车的工位编号写1;
工位2读取小车码为1时,将1号车的工位编号写2;
工位2读取小车码为2时,将2号车的工位编号写2。
总结以上规律编程后,可自动实现小车代码与工位编号的映射,如图4所示。

图4 代码映射例程
图4显示,工位1的小车代码为2,小车2的工位代码为1,符合预期。
针对第2个问题,通过比较工位读出的小车编码,将控制信号发送到对应的小车,例如:
工位1读取小车码为1时,将控制指令发送给1号车;
工位1读取小车码为2时,将控制指令发送给2号车;
工位2读取小车码为1时,将控制指令发送给1号车;
工位2读取小车码为2时,将控制指令发送给2号车。
总结以上规律编程后,可自动实现工位发送指令与小车接收指令的映射,如图5所示。
图5显示,工位1处的小车为2,工位1的指令发送给了小车2,符合预期。
针对第3个问题,可以通过比较小车存储的工位编号,将状态信号发送到对应的工位,例如:
小车1存储工位号为1时,将状态信号发送给工位1;
小车1存储工位号为2时,将状态信号发送给工位2;
小车2存储工位号为1时,将状态信号发送给工位1;
小车2存储工位号为2时,将状态信号发送给工位2。
总结以上规律编程后,可自动实现小车状态区与工位接收区的映射,如图6所示。

图5 指令映射例程

图6 状态映射例程
图6显示,小车1在工位2,小车1的状态信号发送给了工位2,符合预期。
解决了这3个问题,工位与小车之间通过编码自动实现了内部变量的映射,在进行逻辑编程时,只需要调用变量即可,无须再考虑应该去控制哪台车,或采集哪台小车的状态信号。
3 结语
基于网络的自行小车输送系统,采用先进的网络技术与控制技术,简化了控制系统的结构,提升了自行小车的易用性及可靠性。采用模块化设计及结构化编程,使设计图纸及程序更通用,能极大地提高设计效率。在进行工艺调整时,通过增加或减少部分外围硬件及调整程序即可实现,能极大地降低施工难度[2]。地面系统与小车的交互信号全部通过网络传输,能够提供更多的控制信号及状态信号,通过编程可实现更多更复杂的动作,解决了传统自行小车在进行复杂设计时的一些弊端。
基于网络的自行小车输送系统,是目前国内外同类产品的发展趋势,有极高的研究及应用价值。
