远距离成像汽车平视显示光路结构设计
2019-10-14黄兴洲胡诗杰汤国茂张改娜
黄兴洲,胡诗杰,汤国茂,杨 平,许 冰,张改娜
(1. 中国科学院光电技术研究所,四川 成都 610209;2. 中国科学院大学,北京10049;3. 苏州胜利精密制造科技股份有限公司,江苏 苏州 215000)
引言
汽车平视显示系统(head up display,HUD)能够通过OBD(车载自动诊断系统)接口读取汽车行驶信息,并把行驶信息处理成图像,图像被特定光路投射到合成器(汽车前挡风玻璃或者其他透明介质板)上,然后反射到驾驶员眼睛中,形成一个位于驾驶员视线前方的虚像,这样驾驶员无需低头就可以掌握车速、转速、异常提示等汽车信息[1-3]。汽车HUD还可以与智能手机连接,把手机导航等信息投射成虚像。因此,汽车HUD能够避免驾驶员因低头查看仪表盘或手机而产生的驾驶盲区时间,进而减少因存在驾驶盲区时间而引发的交通事故。目前宝马5系/7系、奥迪A6/A7、雷克萨斯GS等多款高端车型都配备了HUD系统,并得到了车主的广泛认可,根据调研,国内汽车公司对汽车HUD系统的研发刚起步。
汽车HUD投射的虚像到驾驶员眼睛的距离称为虚像视距。胡宇[4]研究了汽车HUD显示虚像的内容布局、颜色、对比度、虚像视距等问题;王兴[5]分析了HUD的像差特性,设计了虚像视距为2 m的汽车HUD光路结构;王东平[6]在学位论文中研究了源图像的显示技术,提出了一种虚像视距为2.5 m的HUD光路结构;王睿[7]对汽车HUD的光学构造进行了研究分析,提出了一种虚像视距为2.5 m的汽车HUD光路结构。以上学者都是对虚像视距为2.5 m左右的汽车HUD光路进行研究。
随着近几年汽车HUD的发展,市场对其提出了更高的要求,下一代汽车HUD将结合增强现实(augmented reality,AR)技术,对车外的实时道路信息进行识别,并将其显示在汽车HUD虚像中,同时提供更加完善的导航信息和汽车仪表信息,这种汽车HUD被称作AR-HUD[8-10],是目前汽车HUD研发的前沿领域。汽车AR-HUD显示内容更加丰富,要求的虚像视距更远、虚像视场角更大[11],目前行业内提出的汽车AR-HUD虚像视距为7.5 m、视场角为10°×5°左右。
1 原理分析
1.1 设计原理
汽车AR-HUD系统主要包括虚像显示光路、源图像显示模块、信息控制电路,其中虚像显示光路是整个系统的核心技术,本文主要研究汽车AR-HUD虚像显示光路的光学设计。
虚像是一种能够被眼睛直接观看到,而不能被光屏接收到的光学现象[12]。如图1所示,源图像的一点发出具有一定发散角α1的光束L1,经过反射镜M1、M2和汽车前挡风玻璃的反射后,光束L2以发散角α2进入人眼,大脑会以“光线沿直线传播”的经验对光线反向追迹,认为光束L2以α2反向延长的交点为物点,即虚像点。

图1 虚像原理图Fig. 1 Virtual image schematic diagram
1.2 技术指标分析
根据调研,车速高于30 km/h时,驾驶员目视的中心距离约为7.5 m。当车速较快、虚像视距为2.5 m时,驾驶员需要调节目视焦点查看虚像显示内容,汽车AR-HUD显示的信息相对于传统汽车HUD更为丰富,驾驶员查看虚像的频率和时间也会相应增加,而过多切换目视焦点容易造成眼疲劳,为解决这种情况,目前行业内提出的汽车AR-HUD虚像视距在7.5 m左右。
视场角是指所观察的物体轮廓到观察点连线的立体夹角,汽车AR-HUD虚像视场角是指虚像的边缘与人眼瞳孔中心连线所构成的立体角。虚像视场角过小时,驾驶员不易观察虚像显示的内容,过大时虚像会遮挡驾驶员正常驾车视野。我国机动车道宽度约为3.5 m,如图2(a)所示。虚像视距为7.5 m时,机动车道视场角θ1约为26°。由于汽车驾驶舱的构造特点,如图2(b)所示,驾驶员正常行驶中竖直方向视场角θ2约为11°。为保证驾驶员既能看到HUD虚像显示信息,又能很好地观察车道,目前行业内提出的汽车AR-HUD视场角为10°(水平方向)×5°(竖直方向)左右。
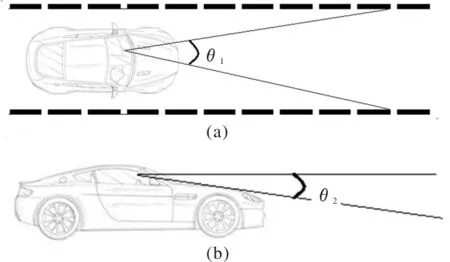
图2 视场角分析Fig. 2 Analysis ofFOV angle
虚像分辨率是影响驾驶员观察到的虚像是否清晰的重要因素。根据人眼典型分辨角为1′,为避免虚像出现“马赛克”现象,虚像像元相对于人眼的角度应小于1′,在虚像视场角为10°(水平方向)×5°(竖直方向)时,虚像水平方向像素量至少为600 pixel,竖直方向像素量至少为300 pixel。为保证驾驶员能够获得更好的虚像清晰度和更高的亮度,本文选用基于DLP3030-Q1芯片组的背投式微投影系统作为源图像模块,投射的源图像尺寸为70.49 mm×39.64 mm,分辨率为854×480 pixel。
汽车AR-HUD 的Eyebox是指驾驶员在能够清晰看到虚像的情况下眼睛可活动范围。驾驶员正常驾车过程中头部难免会有微小的晃动,Eyebox的设计正是为了保证驾驶员在轻微晃动时也能看清汽车HUD虚拟图像。Eyebox的范围是在竖直平面内上下、左右的可活动范围,因为虚像是发散光线进入眼睛的成像结果,驾驶员在水平方向前后晃动时不会影响对虚像的观察,所以在进行光学设计时不必考虑前后晃动的因素。如图3所示,根据人双目瞳孔的平均距离约为65 mm,目前相关论文[5-6]中提出的Eyebox水平方向为120 mm左右,竖直方向为50 mm左右,本文的Eyebox也取此数据作为设计目标。
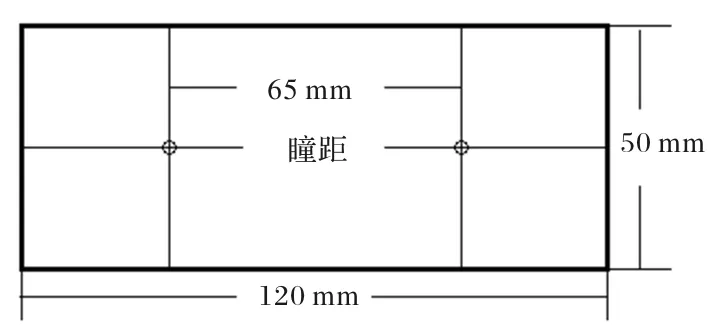
图3 EyeboxFig. 3 Eyebox
1.3 设计参数
由前文对虚像分辨率的分析可知,选用的源图像分辨率为854×480 pixel,其长宽比为1.8∶1。参考行业内对AR-HUD虚像视场角的要求为10°×5°,结合源图像的长宽比,本文提出的虚像视场角为9.8°×5.5°。
根据虚像视距L为7.5 m,视场角为9.8°×5.5°,以虚像的水平方向作为参考进行计算,虚像水平方向尺寸X为
(1)
由于虚像分辨率为854×480 pixel,则水平方向虚像每个像素尺寸为
(2)
要求光学传递函数MTF解析值,即光学系统在虚像空间的分辨率至少为
(3)
汽车AR-HUD系统虚像显示光路的设计参数如表1所示。
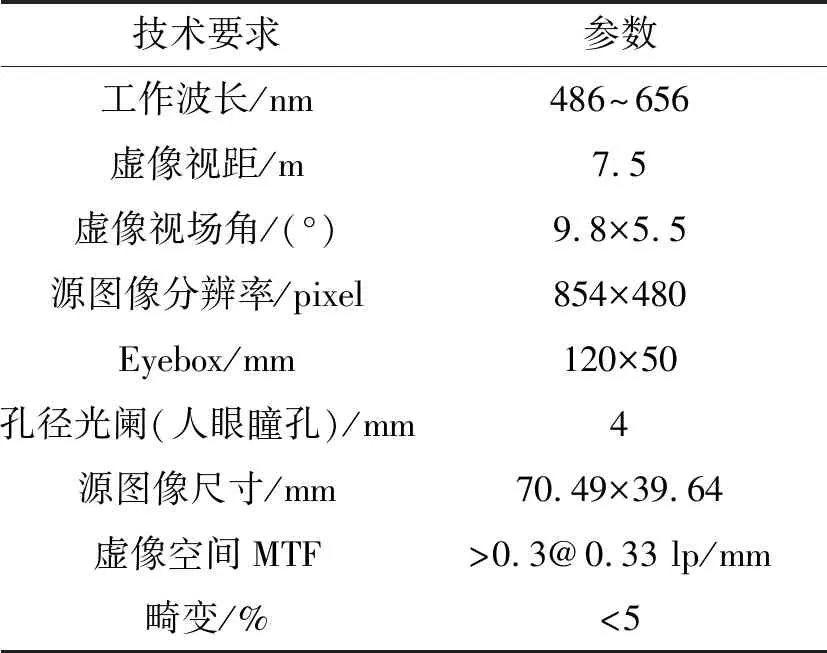
表1 光路设计指标
汽车AR-HUD系统的虚像显示内容为彩色,设计光路时设置系统工作波长为486 nm~656 nm;虚像视距为7.5 m,虚像视场角为9.8°×5.5°左右,源图像分辨率为854×480 pixel,Eyebox范围为120 mm×50 mm。汽车AR-HUD光学系统是一个成放大虚像的目视系统,本文将人眼和虚像显示光路作为整体进行设计,把人眼瞳孔作为系统孔径光阑,驾车过程中人眼瞳孔直径在1 mm~4 mm之间,为保证光线能够充满瞳孔,这里设置入瞳直径为4 mm,源图像尺寸为70.49 mm×39.64 mm;为保证虚像的成像质量,要求系统虚像空间的光学传递函数在0.33 lp/mm处大于0.3,要求虚像的畸变率小于5%。
2 设计实例
本文设计的汽车AR-HUD系统是利用汽车前挡风玻璃作为组合器,系统的其他部分集成在汽车仪表台中,由于仪表台空间有限,采用了离轴反射式的光路结构。汽车前挡风玻璃为不规则面型,参与反射成像时会引入较大的像差,目前行业内针对特定车型的汽车前挡风玻璃面型进行光学设计。因为不同车型的汽车前挡风玻璃面型也不同,所以设计出的光学系统在不同车型中不能直接使用,但本文设计的光学结构的布局具有通用性,在移植到其他车型中使用时,只需在本文设计的结构基础上进一步优化即可,有利于缩短产品的研发周期。把某车型的前挡风玻璃面型拟合成XYP多项式,然后导入光路中进行优化设计。XYP多项式的表达式如(4)式:

(4)

表2为某车型的前挡风玻璃拟合数据。

表2 挡风玻璃拟合数据
离轴反射光路的设计一般是在同轴反射光路的基础上进行优化设计的[13-14]。本文将人眼和虚像显示光路作为整体进行设计,先建立了相应的同轴反射系统,最后在Zemax中对其进行离轴优化,得到图5光路结构。
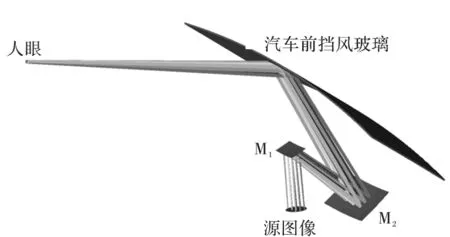
图5 汽车AR-HUD虚像显示光路Fig. 5 Virtual image display optical path ofautomobile AR-HUD
优化后得到的汽车AR-HUD虚像显示光路有效焦距为-309 mm,虚像视距为7.5 m,虚像视场角为9.8°×5.5°。因为汽车前挡风玻璃在虚像显示光路中主要是反射作用,在光路设计时将其作为反射面考虑。图6为汽车AR-HUD虚像显示光路光线追迹图。

图6 光线追迹图Fig. 6 Ray tracing map
优化后的光路中汽车前挡风玻璃、M2和M1的结构参数如表3所示,结构参数主要包括间距、Y方向离轴量、X方向旋转量。
汽车前挡风玻璃引入的高阶像差,一般需要多片球面或非球面反射镜进行矫正,不利于缩小光路体积。自由曲面的面型自由度非常高,不仅能够代替多片非球面矫正像差,还能最大限度地提高光学质量,精简光学结构,随着近几年超精密加工技术的发展,自由曲面的加工与应用也在快速发展。为控制汽车AR-HUD光路体积,同时保证成像质量,M2反射镜采用自由曲面。具体面型参数如表4所示。其中M1为球面反射镜,M2为XYP多项式表示的自由曲面反射镜。

表3 光路结构参数
表4 面型参数
3 成像质量分析
将人眼与虚像显示光路作为整体进行成像质量评价。图8(a)~8(e)分别是孔径光阑在Eyebox范围内的中心、左上角、右上角、左下角、右下角位置时的虚像空间的光学传递函数,通过MTF曲线可以看出Eyebox中心成像质量最好,在左上角、右上角时成像质量稍差,在左下角、右下角时成像质量较好。整体来说,孔径光阑在Eyebox范围内的不同位置时,中心视场MTF值在0.33 lp/mm处大于0.6,全视场MTF值大于0.3。
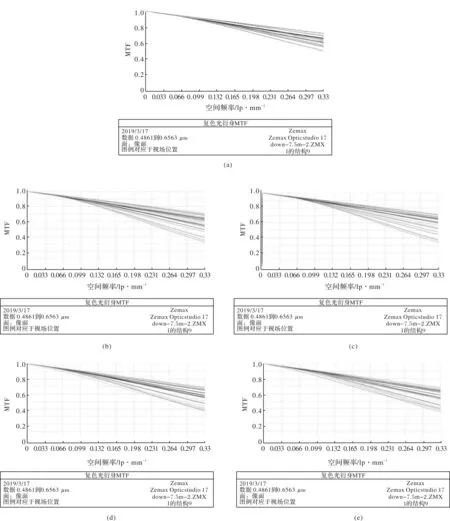
图8 系统MTF曲线Fig. 8 MTF curves ofsystem
图9(a)~9(e)分别是人眼在Eyebox范围内的中心、左上角、右上角、左下角、右下角位置时的畸变值。从图9中可以看到在Eyebox中心和边缘位置畸变都小于2%,可见系统整体畸变较小,满足设计值5%以内。
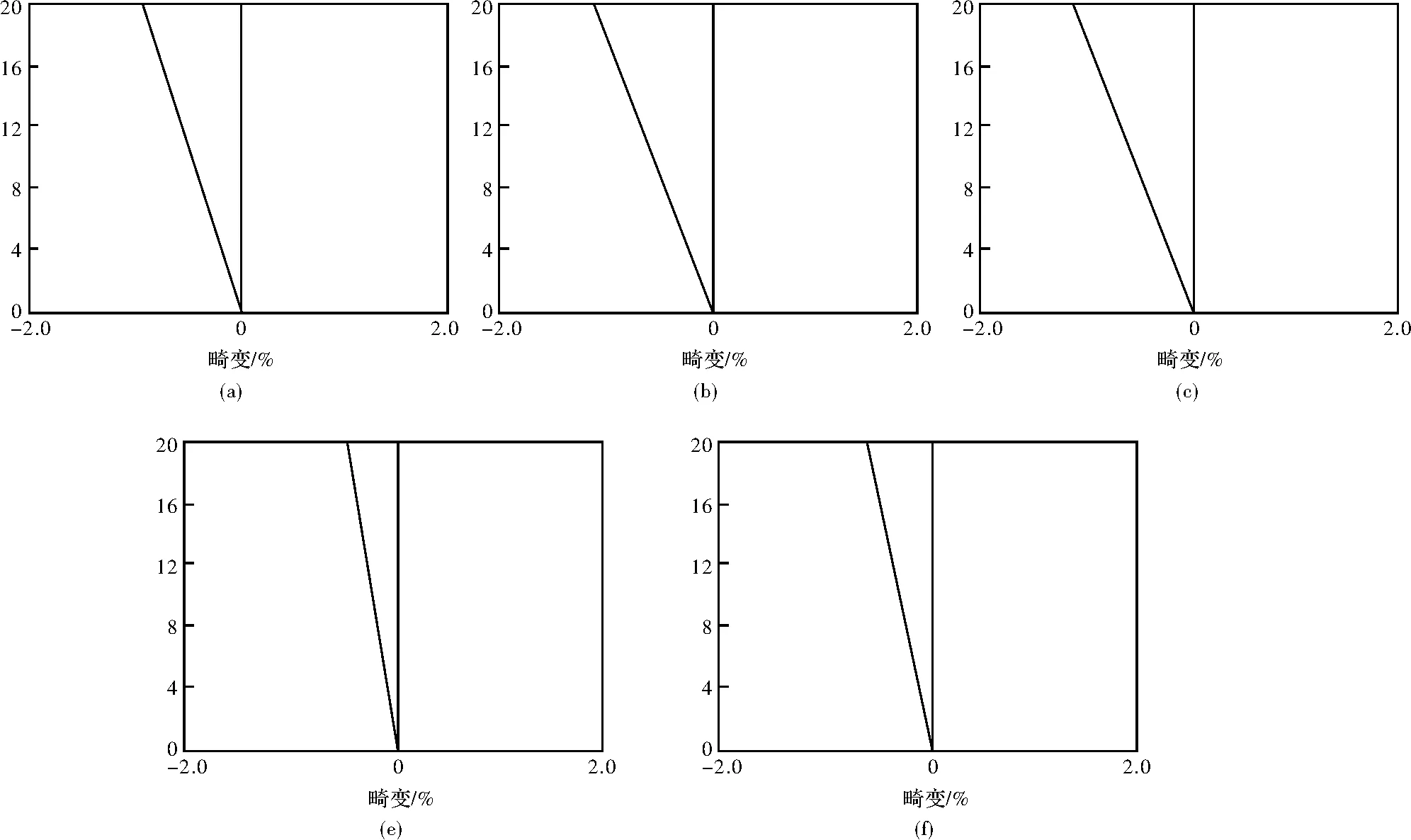
图9 系统F-Tan(Theta)畸变Fig. 9 F-Tan (Theta) distortion
对于一个光学系统来说,公差是评价其实际可行性的重要因素。公差要求过小代表光学系统加工、装调难度很高,还可能导致系统在实际使用过程中成像质量不稳定[15]。使用Zemax软件对该系统的公差做了初步分析,按照表5给出的公差范围,随机抽取了1 000个蒙特卡罗样本,得到的系统虚像面的光学传递函数统计结果如表6所示。从表6可知,在空间频率0.33 lp/mm处系统90%以上的MTF值大于0.49,表明系统公差分配合理,容差能力较强,满足设计需求。

表5 光学系统公差分配
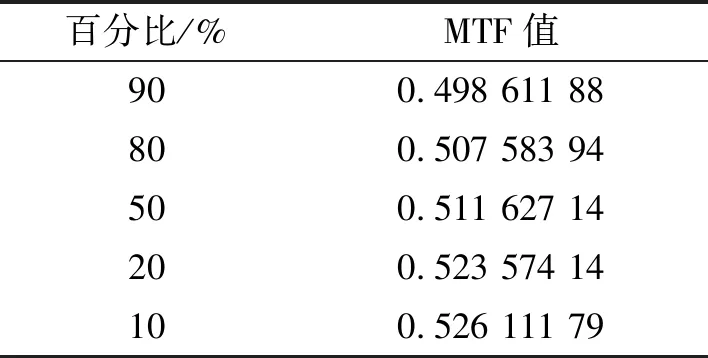
表6 蒙特卡罗分析结果
4 结论
对汽车AR-HUD虚像显示光路进行了研究,分析了光路的技术要求,提出了具体参数,设计了一款有效焦距为-309 mm,虚像视距为7.5 m、视场角为9.8°×5.5°反射式光路结构,并借助Zemax对入瞳在Eyebox内的不同位置时进行了仿真分析。仿真结果显示系统虚像面在奈奎斯特空间频率0.33 lp/mm处,中心视场MTF值大于0.6,全视场MTF值大于0.3,系统虚像畸变在2%以内。最后考虑到实际应用,使用蒙特卡罗方法对系统公差分布做了初步分析,表明系统90%以上的MTF值大于0.49,验证了公差分配的合理性。总体来说,本文设计的汽车AR-HUD虚像显示光路成像质量良好,满足人眼观察图像的要求,达到了设计目标,为汽车AR-HUD的未来发展提供了有力参考。
