消费级无人机数字摄影测量1∶500成图应用浅析
2019-10-12张海坤谨雪朝马果桢陈盼盼岳魁
张海坤 谨雪朝 马果桢 陈盼盼 岳魁
(1.河南省地质矿产勘查开发局 第二地质勘查院,河南 郑州 450000;2.河南省测绘工程院,河南 郑州 450003;3.山东正元航空遥感技术有限公司,山东 济南 250000;4.河南省煤田地质局 物探测量队,河南 郑州 450000;5.方宇勘测有限公司,河南 郑州 450000)
1 引言
近年来,消费级电动固定翼无人机取得了较大发展,以其成本较低,操作、维护简单等优势,在小范围航测作业中得到广泛应用[1-2]。航测作业中像控点布设十分重要,低空无人机获取的影像有像幅小、像片多、重叠率不规则和影像倾角过大等特点[3-5],其成图精度受地面像控点的分布和数量影响。本文以消费级天行者X8 航空模型为载机,加载自驾仪与索尼NEX-3N 数码相机构建一套低成本、易操作、易维护的航空摄影测量系统,以此完成航摄获取试验区影像,并通过不同的像控点布设方案进行1∶500 航测精度的分析,以验证构建的无人机系统在航测领域的可行性。
2 无人机航测系统简介
无人机航测系统以Skywalker Tech 公司生产的天行者X8 为载机,使用高放电电流的锂电池驱动电动机作为动力设备,搭载飞控系统和任务设备配合地面站和数据链组成无人机低空航测系统。无人机低空航测系统主要划分为飞行系统、任务载荷和地面系统[6],无人机低空航测系统结构如图1 所示。
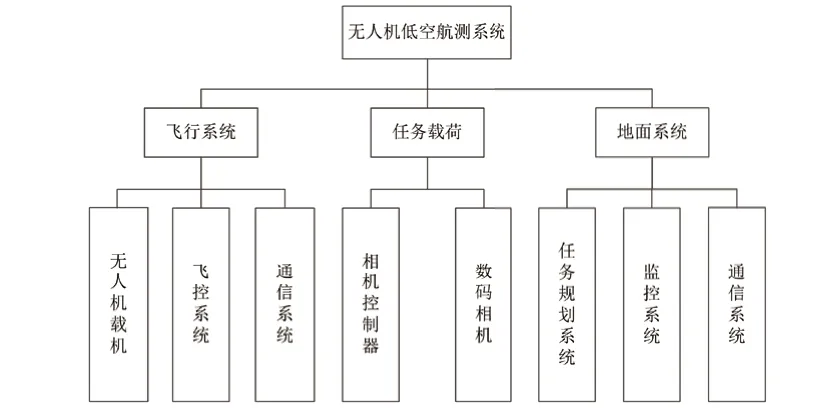
图1 无人机低空航测系统结构
2.1 飞行系统
无人机飞行系统包括载机、飞控系统和通信系统。无人机载机是所有空中设备的载体,除机体外还包括执行机构、伺服系统、动力系统。飞控系统接收并处理由地面站发送的控制信息,按照预设指令控制无人机飞行并按条件执行预设命令,包含GPS 模块、加速度计模块等传感器和微处理器。通信系统主要是指飞控系统与地面站进行通信的数传电台,需要无人机载端与地面系统端配套使用。
2.2 任务载荷
为获取地面影像数据,航测无人机一般搭载各种相机作为任务载荷。由于无人机所能搭载设备的质量较小,一般使用单反或者微单相机进行作业。由于上述相机不是专用量测相机,在进行航摄作业前要对相机进行标定以求解其内方位元素并进行畸变改正。
2.3 地面系统
地面系统包括任务规划系统、监控系统和通信系统,其主要作用是在无人机组装调试阶段对飞控系统进行调试设置,并在飞行过程中保障飞行系统正常工作。任务规划系统负责完成无人机飞行过程中的飞行高度、航向、曝光间隔等航线设计工作。监控系统负责对无人机飞行状态进行监控并对飞行任务临时进行更改、飞行故障的应急处置等。通信系统负责无人机与地面系统之间的通信,是地面系统对无人机进行任务规划和监控的纽带。
3 无人机数字摄影测量成图
3.1 试验数据获取
试验区位于华东地区,地势平坦,无明显高低起伏。采用无人机低空航摄系统,获取了试验区的低空数码影像,其航摄作业参数如表1 所示。测区共有8 条航带332 张影像,航带排列如图2 所示。
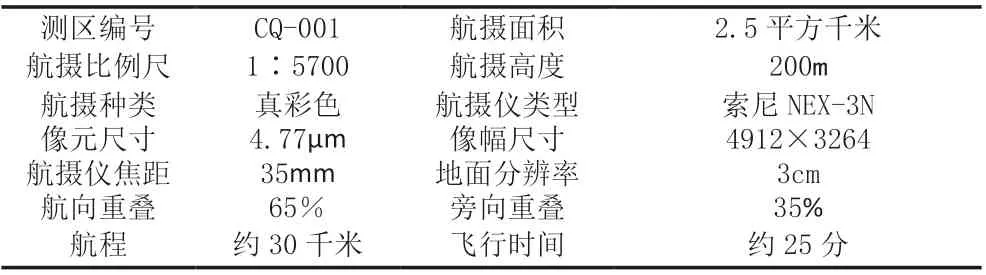
表1 航摄作业参数
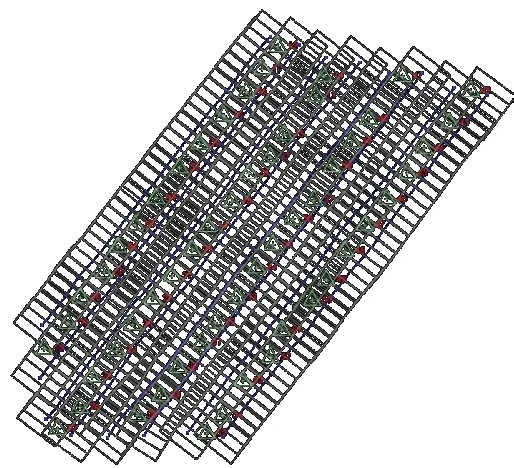
图2 航带排列图
3.2 像控点布设方案
根据像控点布设及后续处理手段的不同,像控点布设方案分全野外布点和非全野外布点两种。全野外布点外业实测点位数量多、工作量大,一般只适用于精度要求高、小面积区域或者特殊区域的航测作业。非全野外布点按照一定要求在外业只实测部分控制点,通过空三加密的方式求解一定数量的加密点和所有像片的外方位元素,能在满足一定精度的情况下大幅减少实测控制点的数量,生产中主要使用该方法布设像控点。
非全野外布点方法又分为区域网法、航带网法等,一般采用区域网法进行像控点布设[7-9]。在进行布点设计前,需要综合考虑原始影像分辨率、成果的精度要求等多种因素,在符合摄影测量内业规范对空三加密精度要求的基础上,对布点方案进行优化设计。
为验证不同像控点布设方案对精度的影响,在本次试验中按照使用的像控点数量从少到多共设计4 种控制点布设方案。
方案1:在测区四角分别布设一个平高控制点。
方案2:在测区四周及中间部位共布设9 个平高控制点。
方案3:航向每6 条基线、旁向每2 条航带布设1个平高像控点。
方案4:航向每3 条基线、旁向每2 条航带布设1个平高像控点。
3.3 内业数据处理
无人机低空影像数据的内业处理采用Inpho软件,使用该软件进行空三加密处理需提供影像文件、相机文件、控制点数据和POS 数据。相机文件由相机检校得到,用于提供相机参数的初始值;控制点数据包括实地测量的像控点、检核点坐标及对应的刺点图,将根据不同的试验方案导入系统进行处理;POS 数据是飞控系统记录的相机曝光时刻的GPS/IMU 信息,用于排列像片并建立航带。空三结束后,将Inpho 空三处理结果导出为PATB 格式,再导入VirtuoZo 软件,建立立体模型后进行立体数据采集,完成DLG 制作[10-11]。
4 精度分析
按照上述4 种像控点布设方案实地进行像控点测量,在测量像控点的同时选择一定的地物作为检核点以评定后续数据处理的精度,在本次试验中检核点为73 个。目前,评价空三平差精度主要看检查点和内业加密点的精度,分别统计较差和中误差。中误差采用公式(1)进行计算。

公式(1)中,m 为点的中误差,单位为米;Δ 为点的坐标较差,单位为米;n 为参与评定精度的点的个数。
根据《数字航空摄影测量空中三角测量规范》(GB/T 23236—2009)中1∶500 比例尺成图对空三解算精度的规定要求,分别对上述4 种方案进行空三平差,平差后像控点平面残差与高程残差统计如表2 所示。
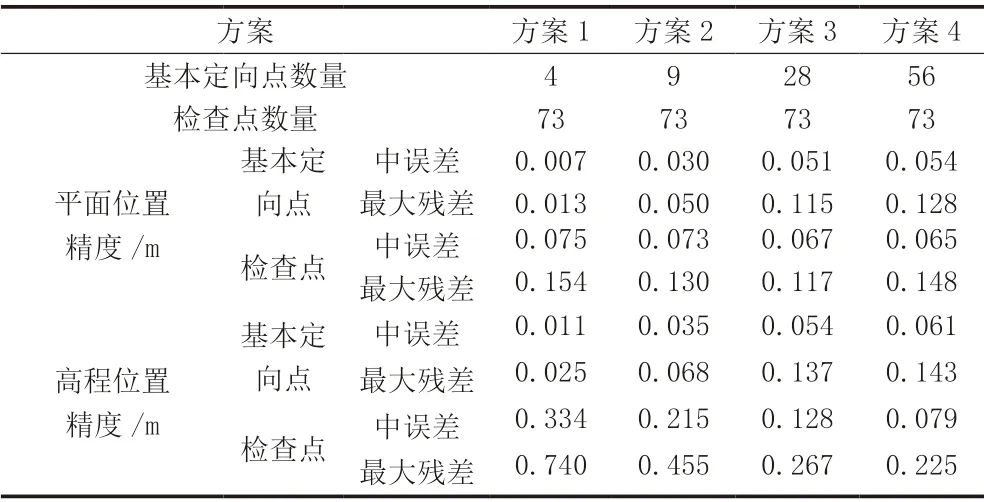
表2 试验区空三精度统计
表2 中,基本定向点平面位置中误差,平地、丘陵地不应大于0.13m;检查点平面位置中误差,平地、丘陵地不应大于0.175m;基本定向点高程位置中误差,平地不应大于0.11m,丘陵地不应大于0.2m;检查点高程位置中误差,平地不应大于0.15m,丘陵地不应大于0.28m。
5 结论
根据航摄条件及不同的像控点布设方案,可得出结论:各方案平差后检核点平面精度相差不大。随着像控点数目的增加,平面精度略有改善,表明像控点的布设方案对平面精度影响较小,像控点的增加与优化对平面精度没有明显提高。随着像控点的增加,空三加密后检核点误差逐渐逼近像控点残差,在方案4的基础上进一步提高像控点布设密度不会明显提高空三加密的精度。上述4 种布点方案平面精度均满足相关规范对于平地区域1∶500 比例尺测绘的要求,但只有方案4的高程精度满足1∶500比例尺测绘要求。因此,应该合理布置像控点,力求达到经济、适用。