基于RBF神经网络的PID控制系统 优化控制研究
2019-09-28张强安小刚
张强 安小刚


摘 要:液压启闭机运行工况复杂、本身具有非线性特性,普通PID参数无法较好地实现系统在整个运行过程中的精确控制,为了解决这一问题,本文采用RBF算法对P、I、D参数进行优化,从而实现对PID控制系统的优化控制。经仿真试验,本文提出的控制系统参数优化方法能够优化对液压启闭机的控制。
关键词:RBF;PID;参数优化
中图分类号:TP273 文献标识码:A 文章编号:1006—7973(2019)09-0048-02
1 引言
泄洪系统的控制技术虽然有了较好发展,但在复杂的工作环境条件下,控制系统的控制性能还需要进一步提升,主要表现在控制的灵敏度,故障处理不及时则会对泄洪系统产生严重的影响。因此泄洪系统的对控制系统的稳定性、可靠性要求比较高。经实践研究,PID控制能够较精确和快速的实现对闸门液压启闭机的控制,使闸门控制系统稳定运行。但是由于液压启闭机具有非线性特性,在不同的阶段模型是变化的,所以PID参数无法较好的实现系统在整个运行过程中的精确控制,输出响应存在一些波动,且在某些运行区域很難达到良好的控制效果。为解决该问题,本文采用RBF神经网络进行PID参数优化来实现对液压启闭机的优化控制。
2 RBF神经网络特点
随着科学技术的发展,人工智能算法也逐渐在复杂控制对象中不断应用,并成为主要研究热点。人工智能算法可以有效克服复杂控制对象中多个参数的动态变化问题,可以及时根据环境的变化、控制输入目标的变化等调整控制参数。而径向基函数神经网络(RBF)算法就是人工智能算法之一,RBF主要学习网络是:①输入层连接各学习网络和输入数据;②隐含层是对输入的数据进行变换分析;③输出层进行响应输出。
神经网络的激活函数是学习网络运行的核心。得益于激活函数Gauss函数和网络优化性能指标函数,RBF神经网络具有局部逼近性,主要实现方法是:首先将研究目标分解为若干个局部目标;其次,在隐含层对每一个分解目标进行优化;最终,在输出层对各个分解目标进行全局化逼近建造研究目标。RBF神经网络比其他的神经网络具有更多的优势:
(1)当优化的数据与研究目标逼近时,RBF网络能够把数据之间的误差控制在较为理想的局部范围,让局部得到更大可能的优化;
(2)有较强的能力去学习数据之间的非线性关系,能够克服大批量不规则数据之间的关联规则;
(3)能够避免呈现局部范围出现最优解的情况;
(4)RBF神经网络具备自调节学习能力,能及时根据环境变化,对控制参数进行优化控制,能够对较为随机而不规则性的数据和噪声实现滤波。
3 基于RBF神经网络的PID的参数优化
RBF神经网络是PID参数优化的核心。为了优化泄洪系统的控制,通过RBF网络学习输入的数据,不断进行学习优化,输出适应于PID控制器的参数。优化方法如下:
首先,输入特征向量为:
然后,引入网络优化性能指标函数:
迭代运算:
式中:α为动量因子;η是学习速率。
利用雅可比矩阵(Jacobian)的输出对输入的最优线性逼近优点,推导计算研究目标的输出信息对变化的控制输入信息之间的灵敏度变化情况:
式中 。
结合RBF分析的数据,PID控制系统能够实时的调整学习到的控制参量,自动实现对PID参量的调整和矫正,从而达到较高的控制水平,并且能够满足控制要求。通过采用数字PID控制算法(增量式)进行控制误差e计算,计算如下:
(3-8)
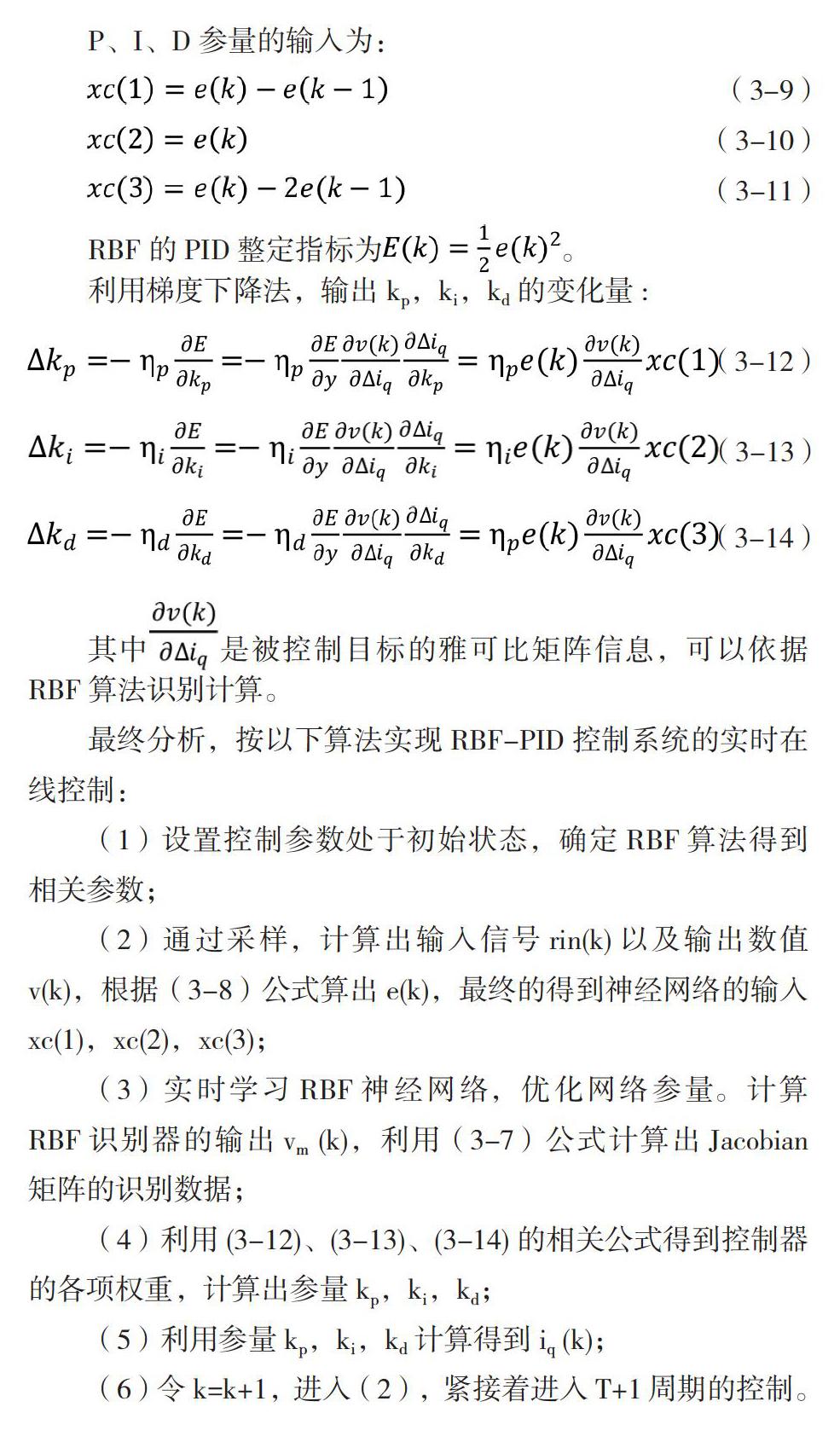
P、I、D参量的输入为:
(3-9)
(3-10)
(3-11)
RBF的PID整定指标为。
利用梯度下降法,输出kp,ki,kd的变化量:
其中是被控制目标的雅可比矩阵信息,可以依据RBF算法识别计算。
最终分析,按以下算法实现RBF-PID控制系统的实时在线控制:
(1)设置控制参数处于初始状态,确定RBF算法得到相关参数;
(2)通过采样,计算出输入信号rin(k)以及输出数值v(k),根据(3-8)公式算出e(k),最终的得到神经网络的输入xc(1),xc(2),xc(3);
(3)实时学习RBF神经网络,优化网络参量。计算RBF识别器的输出vm (k),利用(3-7)公式计算出Jacobian矩阵的识别数据;
(4)利用(3-12)、(3-13)、(3-14)的相关公式得到控制器的各项权重,计算出参量kp,ki,kd;
(5)利用参量kp,ki,kd计算得到iq (k);
(6)令k=k+1,进入(2),紧接着进入T+1周期的控制。
本文选择传递函数为,结合以上理论推导和神经网络学习方法,MATLAB仿真得出系统优化控制结果如图1所示,红色直线是输入信号,蓝色曲线为阶跃响应的PID参量得到的结果,绿色曲线为RBF-PID参量得到的结果。通过对比PID控制和RBF-PID控制的实验仿真曲线,分析得出:对于确定的系统,假若PID参量调整的比较准确,PID控制结果情况与RBF-PID控制结果相比较好;但是,对于不断发生环境变化的系统,RBF-PID则具有更加突出的效果。因此,要想实现对液压启闭机的闭环控制,首先,需要得到控制系统的预估模型;其次,明确确切的PID参量域;最后运用RBF的迭代方法,学习适配PID参量。
4 结语
本文主要介绍了RBF的应用特点和RBF-PID优化控制算法的推导和验证。针对经典PID控制在液压启闭机中应用的不足,采用RBF神经网络技术,对PID控制系统参数进行优化。经仿真验证,面对复杂的工作应用环境,RBF神经网络PID控制不仅具有学习调整能力强的特点,还能够得到更好的控制效果,促进了控制系统控制技术的发展,为泄洪系统稳定可靠运行提供技术保障。
参考文献:
[1]姜丽芳.基于PLC的水电站闸门监控系统的研究[D].东北农业大学,2008.
[2]张志学.水利枢纽闸门综合集成自动化研究与实践[D].华中科技大学,2004.
[3]曹文霞. RBF神经网络整定PID控制直线永磁同步电机的研究[D]. 合肥工业大学, 2009.