关于川大自动化若干问题的探讨
2019-09-17陈学超
陈学超
摘 要:空管自动化系统是实施空中交通管制的重要系统,随着国产空管自动化的发展,国内已有不少在用的国产空管自动化系统,但实际运行过程中经常会发生一些比如飞行计划与雷达航迹不能正常相关、假目标、航路推算错误等问题。该文分析了海口川大自动化在运行过程中遇到的一些故障案例,并对故障案例产生的原因进行探讨,为同行提供可借鉴的经验。
关键词:空管自动化 川大智胜空管自动化 飞行计划自动相关 假目标
中图分类号:TM76 文献标識码:A 文章编号:1672-3791(2019)06(b)-0006-02
民航空中交通管制自动化系统是空管部门实施空中交通管制的重要设备,近年来国产自动化系统飞速发展,国产自动化的安全性与稳定性不断提高,但是仍然会出现一些影响管制员指挥的系统故障,对于这些故障的分析有助于排除安全隐患,提高自动化稳定性,改进自动化的一些功能,为安全运行打下坚实基础。该文浅析川大自动化系统的两起案例,期望能给维护人员带来一些参考。
1 常见问题分析
1.1 川大自动化系统相关率低
1.1.1 现象描述
某年8月区域管制中心管制员反映川大自动化相关率较低,特别是某些机场起飞的航班,在进入我方情报区前一直处于未相关的情况。
1.1.2 问题分析
空管自动化系统飞行计划与雷达航迹不能正常相关这个是自动化系统中比较常见的一种故障现象,分析此类问题,首先我们要检查该目标是否满足计划与雷达航迹相关的有关条件:第一,我们要查看的是航迹与飞行计划是否具有相同并且唯一的二次代码或者24位地址码;第二,查看该航班的飞行计划是否处于激活的状态;第三,航迹是否满足自动化相关的区域条件;第四,在SDD上能查询到简短的飞行计划,即SDP能够正常接收来自FDP处理后发出飞行计划。经过仔细回放录像调查,发现该航班并未出现二次代码重码的现象,并且24位地址码也是唯一的,飞行计划当时处于激活的状态,SDD上能够查询到该航班的简短飞行计划;而在查询FDP日志时发现众多未相关的航班都具有同个错误提示“Track:[AXXXX] due to AutoCouple with plan[xxxxx],But planwarpDistance[1036355] overflow”。由此可知,不满足川大自动化相关的区域条件,检查配置文件fdp.ini中的PlanWarpDistance参数设置为500km,即相关计算时允许计划航迹点与雷达航迹点的距离偏差最大不超过500km,而日志给出的提示远远大于自动化设置的参数值,因此,我们将问题的关注点转向计划航迹点的位置的计算。对于川大自动化系统来说,某个时刻计划航迹点的位置计算与以下因素有关:一是自动化需要计算起始机场之间的全航路长度,因此起飞机场的经纬度必须存在并且正确,否则系统默认从起飞机场到第一个航路点的距离为1000km;二是计划的航路解析必须正确,即在管制区域内有解析航路点;三是计划的巡航速度值正确并且有效;四是起飞机场到入界点的飞行时间(s)必须存在并且正确;五是计划解析出的航路点经纬度必须正确。由此,我们可以进一步将问题定位在调查起飞机场经纬度、航路分析、计划巡航速度、起飞机场至入界点的飞行时间、航路点经纬度上。经调查,发现航路分析和计划巡航速度是正确的,但是某些起飞机场缺乏经纬度信息,同时部分起飞机场至入界点的飞行时间参数也不完整并存在个别时间错误,所以计划航迹点与雷达航迹点的距离偏差过大而导致相关条件溢出,从而出现了计划与雷达航迹无法相关现象。除此之外,还有一特殊的情况也会导致日志提示出planwarpDistance overflow的错误,即某航班比预计的起飞时间延误了30min以上,但是由于外界的某些原因,自动化系统仍未及时地收到延误报,导致自动化系统认为该航班已经起飞,并且开始进行计划航迹点的推算,等到航班起飞的时候由于雷达航迹点与计划航迹点的距离大于川大自动化设置的参数值时,就会导致出现planwarpDistance overflow的错误,从而该起飞的航班无法进行自动相关。
1.1.3 同类问题建议
川大自动化导致不相关的原因有很多种,该案例只是详述了其中两种导致计划与雷达航迹不相关的情况,以及分析方法;在实际运行过程中,导致此类现象的原因还有收到的FPL报格式不符合规范,川大自动化将其扣下而导致雷达航迹找不到相应的计划相关等情况。遇到类似的情况,管制员可以使用手动相关或者是挂简标牌的方式进行应急,维护人员可以根据雷达航迹与计划相关的条件进行逐一排查和故障定位,在查找原因的过程中,还可以结合报文的查询、FDP程序日志等进行原因分析。
1.2 新西沙雷达顶空频繁出现假目标
1.2.1 现象描述
某年10月,管制员反映新西沙雷达顶空位置附近频繁出现假目标,假目标具有高度,但是速度为0,假目标出现时二次代码与区域内航班相同,并且出现时间相当短暂,目标消失后又有新的假目标生成。
1.2.2 问题分析
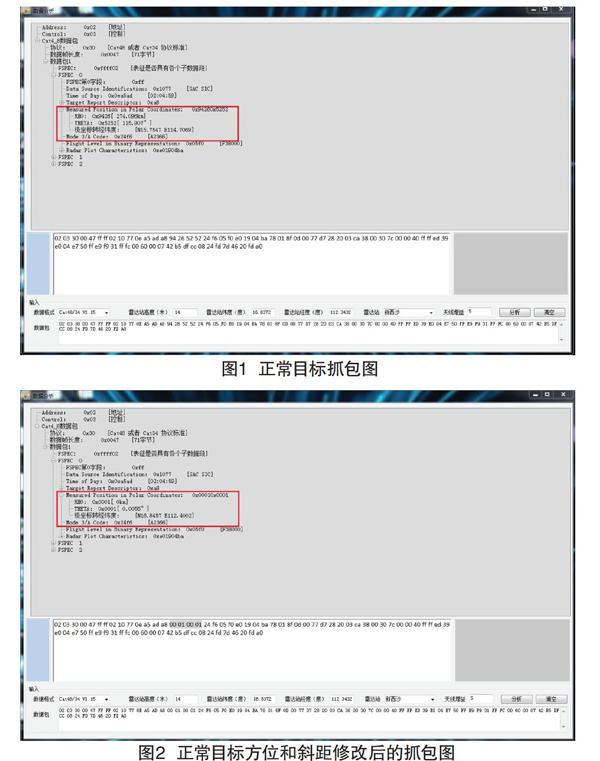
空管自动化系统产生目标分裂或是假目标的原因是多样的,其中由于二次雷达本身原因导致的假目标干扰种类有多径传播、二次环绕、异步干扰、假框架目标、旁瓣影响等。针对此类假目标干扰的特征,与二次环绕干扰有些类似,为了验证这个猜测,笔者利用了雷达数据抓包软件进行抓取雷达数据包来分析,发现所调查的假目标雷达包中均为缺失斜距和方位字段的数据包。由于使用的雷达数据抓包分析软件中极坐标转经纬度的算法是参考了川大智胜有关人员论文而开发的,因此做了以下实验,计算斜距为1km,方位为1°目标的经纬度,(因为该软件不能处理为0的参数,因此做了近似);原目标如图1所示。
二次代码为A2366,位置(N15.7547°,E114.7069°);此时将斜距修改为1km,方位修改为1°,如图2所示。
计算的位置为(N16.8457°,E112.4002°),该位置正是新西沙雷达站位置的顶空。因此,得出初步的判断为缺省斜距和方位字段的雷达数据包在川大自动化系统中处理为斜距为0km,方位为0°,导致极坐标转换为经纬度时,该经纬度刚好就在西沙雷达站顶空附近。
1.2.3 同类问题建议
海口主用自动化系统不会处理经纬度缺失的数据包,因此并未收到影响;而川大自动化系统处理了这些信息缺失的雷达数据包,此数据包时断时续,因此未能形成连续的航迹。针对此类问题,空管自动化系统中出现假目标,首先管制部门要评估这些假目标是否严重干扰了管制员的监控,若是干扰较为严重的情况下,可以申请从自动化中断开该路雷达(现如今自动化系统接入的雷达已实现多重覆盖)。作为机务人员在排查故障原因时,要迅速定位故障雷达,做好应急处置,并结合相关软件、HCT-7000等工具进行雷达数据的简要分析,配合雷达站的机务员排除故障,提供故障排查的方向。
2 结语
该文浅析了川大自动化在运行过程中所遇到的一些问题以及故障的排查思路,自川大自动化系统在海口投产运行以来,设备经过多次升级,系统在不断完善,稳定性有所提高,减轻了运维人员的负担,但是仍不时有小问题发生,运维人员只有在深入了解了川大自动化的系统架构和工作原理之上,才能对发生问题的原因逐一排查,快速定位故障和排除故障。以上是个人对既有工作的经验总结,以供同行参考,若有不足之处,望提出改进。
参考文献
[1] 川大自动化系统文档MHATC-技术手册[Z].
[2] 吴江.多雷达和ADS数据融合研究和应用[D].四川大学,2004.
[3] 王微.西宁机场THALES二次雷达干扰及假目标的抑制实现[D].兰州大学,2018.
