试飞驾驶技术评价方法研究
2019-09-10刘智汉张晓敏党维
刘智汉 张晓敏 党维


摘要:通过分析以往试飞驾驶技术评价方法中出现的问题,以典型的俯仰倍脉冲试飞动作为研究对象,将整个动作过程分为三个阶段,提出了针对每个动作阶段的评价标准以及整个试飞驾驶动作的评价算法,并在此基础上开发了驾驶动作评价软件,最后在地面模拟器上对评价软件的效果进行了验证,结果表明该方法能够客观地评价试飞驾驶技术水平,可以推广到其他试飞驾驶动作的评价上。
关键词:试飞驾驶技术;评价软件;地面模拟;试飞员;算法
中图分类号:V217 文献标识码:A DOI:10.19452/j.issn1007-5453.2019.03.006
准确的符合规范要求的飞行试验驾驶技术不仅可以充分地揭示被试产品的特性,暴露其设计和制造缺陷,同时也保证了试飞方法原理的正确性和有效性,从而确保试飞结论的真实可靠。因此,不断提高飞行试验驾驶技术是确保飞行试验质量的关键,是新航空武器装备定型试飞和民用飞机适航审定试飞获得可靠结论的重要保证]。而在试飞员培训中,由于学员的人为因素,导致同一个动作,不同的试飞员做出的结果也差别很大,对试飞结果带来影响,因此,有必要建立一套完整的试飞驾驶技术评价训练体系,使每个学员都掌握标准的试飞驾驶动作,尽量避免人为因素对试飞结果的影响。
目前国内关于试飞驾驶动作的评价方法研究开展得比较少,更多的是针对特定试飞科目的试飞方法研究。参考文献建立了地面模拟评价系统,但评价准则相对简单,不能够适应真实的试飞驾驶动作,评价效果不够理想。本文先分析了以往试飞驾驶技术评价方法中出现的问题,然后以典型试飞动作为研究对象,提出了相应的评价标准及算法实现,并开发了相应的试飞驾驶技术评价软件,最后在模拟器上进行了验证,结果表明该方法能够客观地评价试飞驾驶动作完成质量好坏。
1存在问题
目前,对试飞动作的评价,都是将整个试飞动作分为三个阶段:配平段、动作段和结束段,分别对每一个动作阶段,用相应的指标去评价完成质量的好坏,最后再对整个动作的完成质量给出一个综合的评价。但在实际应用过程中,往往出现评价软件打分不合理,不能真实反映试飞员的驾驶技术水平,动作识别准确率不高等问题,究其原因,主要表现在以下方面:(1)对试飞动作的三个阶段的划分算法不够合理;(2)对每个动作阶段,所提的指标及该指标所占的权重的处理不够合理;(3)对试飞动作的三个阶段所占的权重的分配不够合理;(4)所设计的评价方法往往是针对理想的试飞动作,但面对实际的试飞数据,所设计的算法有很大的局限性。
针对以上的问题,本文结合实际的试飞动作数据,以典型的俯仰倍脉冲动作为例,详细介绍该动作的评价方法及相应的软件处理算法,最后给出了模拟器试验的结果。
2评价软件设计
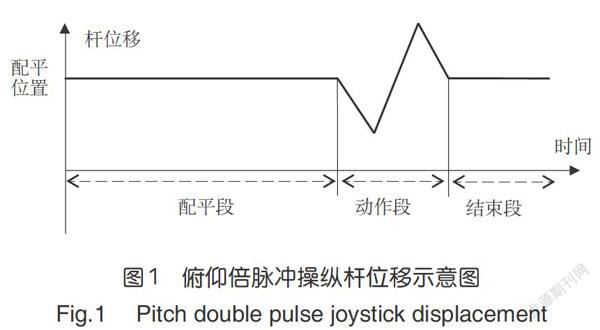
由于俯仰倍脉冲为一个考查飞机纵向品质特性的开环试飞动作,要求动作完成后能够激起飞机纵向品质特性,动作示意图如图1所示。根据动作的这一特性,对此动作的评价分为三个阶段来评价,最后将三个阶段的分值按照权重进行综合。
2.1配平段评价算法
动作开始前,要求飞机应为无倾斜的水平直线等速飞行状态,因此配平段的主要评价参数为:高度H、速度V和稳态法向过载偏差量△n。采用5分制,根据高度H、速度V和稳态法向过载偏差量△n在这一阶段的保持情况进行评分。此阶段得分仅占整个动作分值的10%。具体得分依据见表1。
对高度、速度和过载的偏差量,分别按照表中的所列的条件给出相应的分值,最后对这三项再求平均值,得出配平段的分值。
配平段的评价语如下:(1)配平段的分值为多少;(2)高度保持项的分值及偏差量为多少;(3)速度保持项的分值及偏差量为多少;(4)过载保持项的分值及偏差量为多少。
2.2动作段评价算法
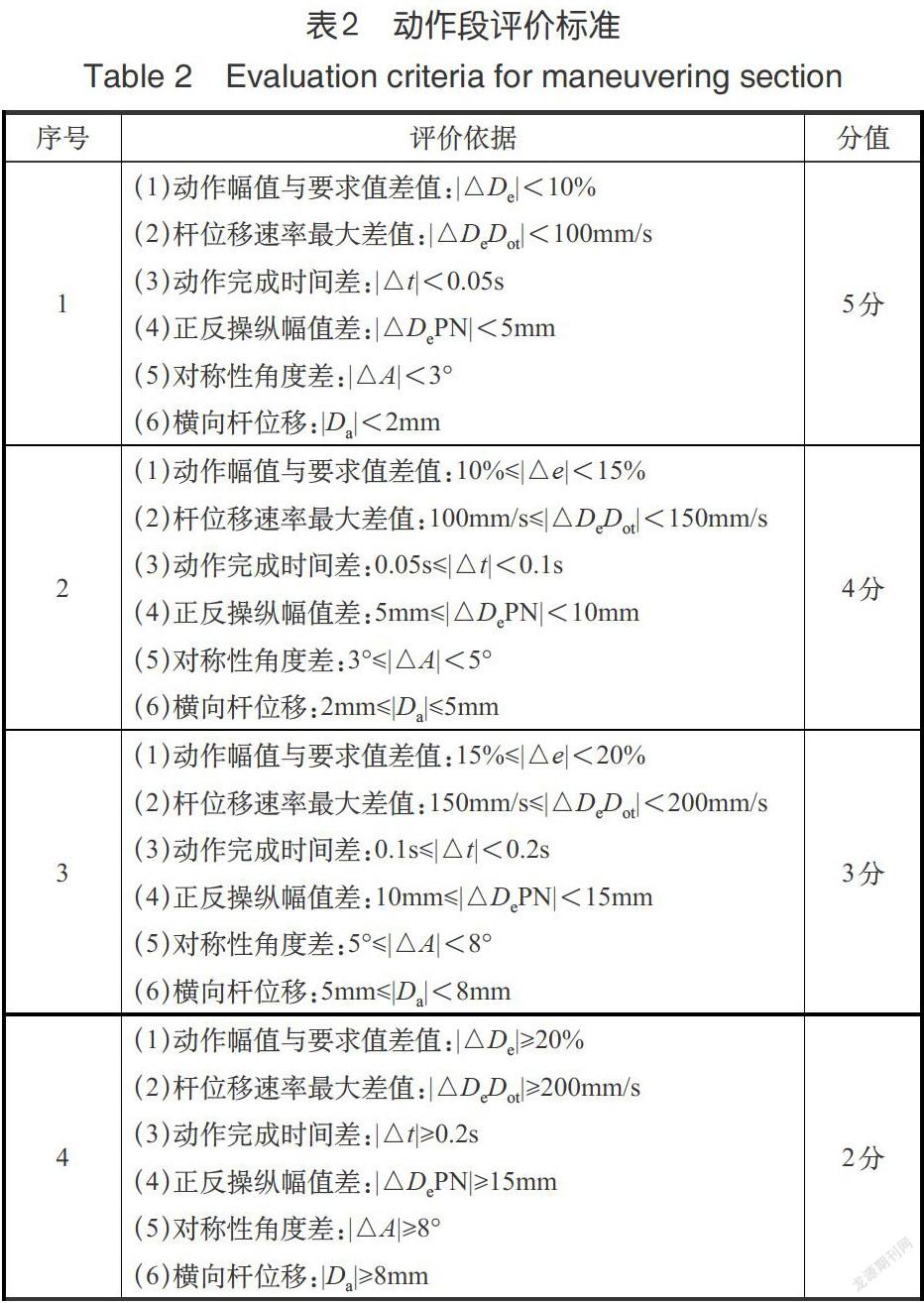
俯仰倍脉冲操纵要求动作干脆利落,准确回杆至配平位置,不应有横向的杆操纵,且推拉杆的操纵要对称,因此动作段的主要评价参数为:操纵杆输入量D、完成时间t、动作曲线的对称性和光滑度以及横向杆位移D。采用5分制,根据动作幅值与要求值差值、杆位移速率最大差值、动作完成时间差、正反操纵幅值差、对称性角度差和横向杆位移等在这一阶段的保持情况进行评分。此阶段得分占整个动作分值的60%。具体得分依据见表2。
对动作幅值与要求值差值、杆位移速率最大差值、动作完成时间差、正反操纵幅值差、对称性角度差和横向杆位移等,分别按照表中的所列的条件给出相应的分值,最后对这几项再求平均值,得出动作段的分值。
动作段的评价语如下:(1)动作段的分值为多少;(2)动作幅值与要求值差值以及分值为多少;(3)杆位移最大速率值差值以及分值为多少;(4)动作完成时间差值以及分值为多少;(5)正反操纵幅值差值以及分值为多少;(6)对称性角度差以及分值为多少;(7)横向杆位移以及分值为多少。
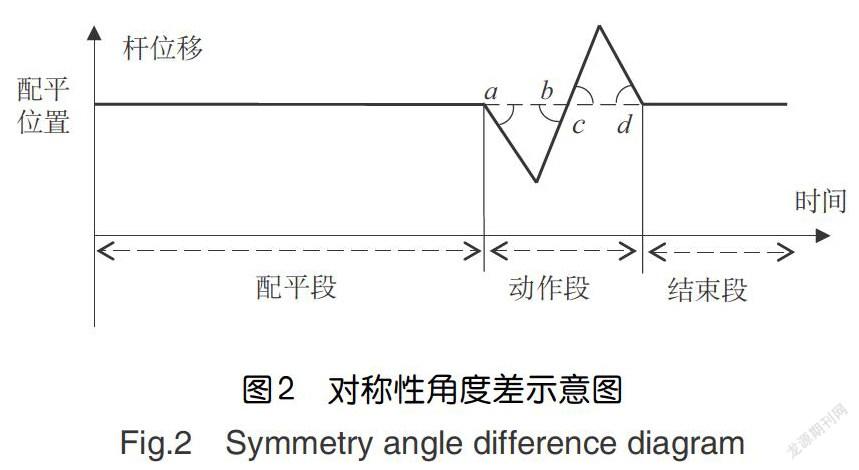
其中,对称性角度差的定义如下:将倍脉冲的4段动作曲线与初始位置的夹角(锐角)从左到右分别定义为a、b、c、d,则|△A|为这4个角中任何两个角度之间的差值。如图2所示。
2.3结束段评价算法
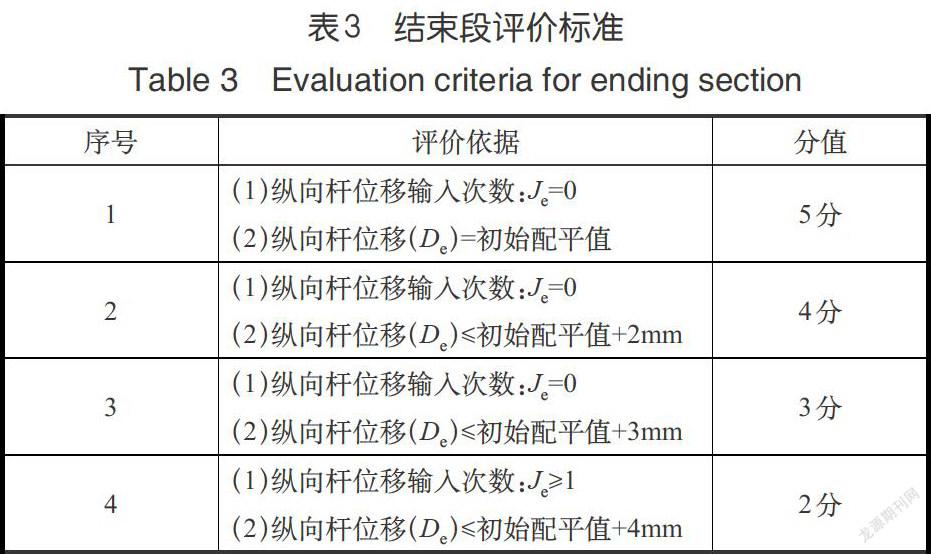
动作结束后,在飞机自由运动过程中,要求杆、舵不能有输入,不得干扰飞机的运动,因此这一阶段主要对杆的输入量进行评价,若基本没有纵向杆輸入,可根据杆位移参数变化的大小得分在3〜5分之间;若有明显的纵向杆输入,则为2分。此阶段得分占整个动作分值的30%。具体得分依据见表3。
对纵向杆位移输入次数和纵向杆位移与初始配平值的差值,分别按照表中的所列的条件给出相应的分值,最后对这几项再求平均值,得出结束段的分值。
结束段的评价语如下:(1)结束段的分值为多少;(2)纵向杆位移输入次数以及分值为多少;(3)纵向杆位移与初始配平值的差值以及分值为多少。
得到以上这三个阶段的分值以后,最后再求出三个阶段的加权平均值,即为整个动作的得分,并分别给出三个阶段的分值以及评语。
2.4软件设计
在处理真实的试飞动作数据时,首先要解决的便是如何划分动作的三个阶段,确定动作段的开始点和结束点。对于动作曲线上的一小段振荡,如图3中的圈内部分,究竟是划入动作段还是配平段,都会影响整个动作最终的分值。如果划入配平段,可能会增大配平段法向过载的偏差量,如果划入动作段,又会影响动作段的对称性和平滑性,因此需要确定一个合适的阈值,对动作曲线上的振荡进行“过滤”。按照以上的算法,开发了试飞驾驶技术评价软件,软件的界面如图4、图5所示。
3模拟器验证
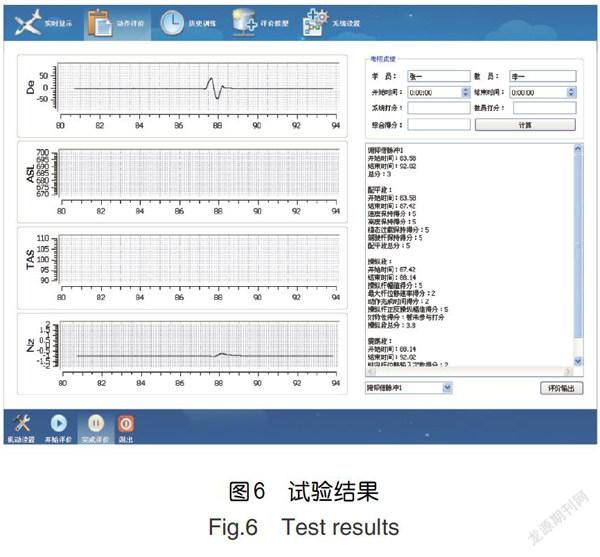
在地面模拟器上,利用上述试飞驾驶动作评价软件,对俯仰倍脉冲动作进行了试验验证,试验结果如图6所示。
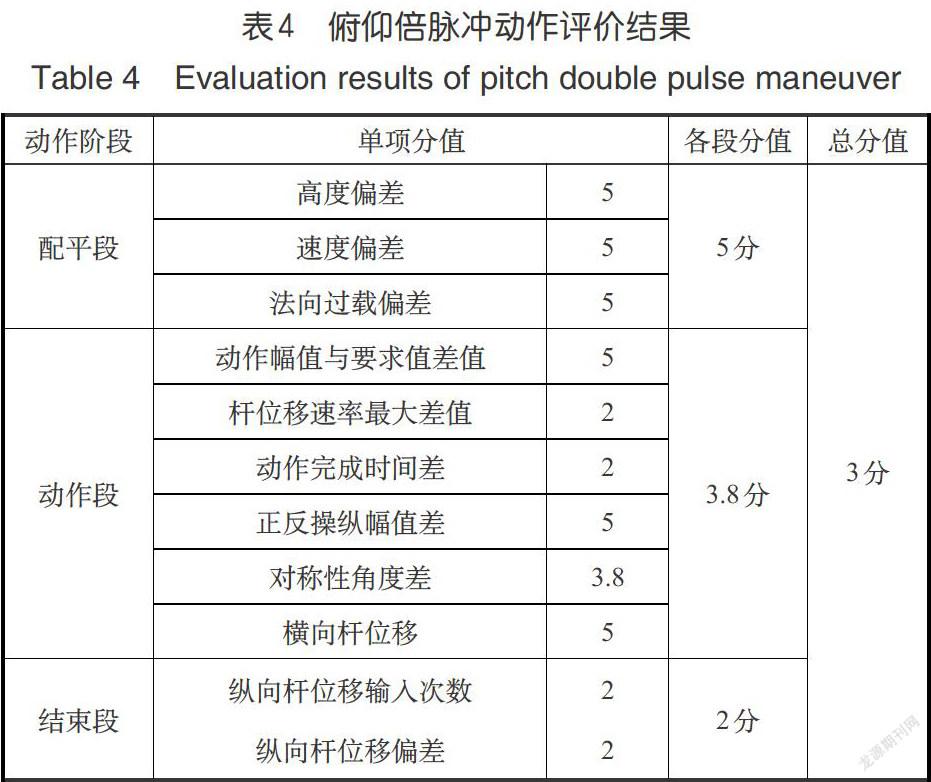
评价软件对本次俯仰倍脉冲动作的打分为3分,各个动作阶段的分值见表4。
对于配平段,高度、速度和过载保持较好。对于动作段,主要问题是动作完成时间稍长,对称性稍差。对于结束段,主要问题是杆位移有超調,且偏差较大,存在振荡,如图6中圈内的部分。
从结果可以看出,该种方法能够对驾驶动作完成质量的好坏做出准确的评价。通过将系统的打分和教员的打分相结合,能够如实反映学员的驾驶水平。
4结束语
本文首先分析了以往试飞驾驶技术评价方法中出现的问题,然后以俯仰倍脉冲动作为研究对象,提出了各个动作段的评价标准及算法实现,并开发了相应的试飞驾驶动作评价软件,最后在地面模拟器上进行了验证,结果表明该方法能够客观地评价试飞驾驶动作完成质量的好坏,可以将该方法推广到其他试飞驾驶动作的评价上,但由于试飞驾驶动作的特殊性,需针对每个动作建立相应的评价标准和评价算法,逐步形成一个覆盖所有开环和闭环试飞驾驶动作的评价系统,后续可以考虑引入智能算法,降低开发人员的工作难度,提高评价系统软件的适应性。
参考文献
[1]中国飞行试验研究院.飞行试验驾驶技术指南(飞机册)[M].西安:中国飞行试验研究院,2012.
Chinese Flight Test Establishment.Flight test driving technology guide(aircraft book)[M].Xi’an:Chinese Flight Test Establishment,2012.(in Chinese)
[2]张同斌,李体方,盛又方.基于BP神经网络的试飞员驾驶技术评估[J].计算机仿真,2012,29(10):110-113.
Zhang Tongbin,Li Tifang,Sheng Youfang.Test pilot driving skill assessment based on BP neural network[J].Computer Simulation,2012529(10):110-113.(in Chinese)
[3]田强.第四代战斗机飞行品质及其试飞技术研究[J].飞行力学,1996(2):17-23.
Tian Qiang.Research on some flying quality criterions and flight test techniques of fourth generation fighters[J].Flight Dynamics,1996(2):17-23.(in Chinese)
[4]张晓敏,潘运亮,党维.试飞驾驶技术地面模拟评价方法研究[J].飞行力学,2014,32(3):273-276.
Zhang Xiaomin,Pan Yunliang,Dang Wei.Research on evaluation method for flight test piloting technologies on ground simulation[J].Flight Dynamics,2014,32(3):273-276.(in Chinese)
